潜空跨介质无人航行器研究现状与分析
2024-01-23黄大志唐雯铠周弘骏
周 正,黄大志,唐雯铠,周弘骏
(江苏海洋大学海洋工程学院,江苏 连云港 222000)
潜空跨介质无人航行器是一种不仅可以在空中飞行而且可以在水下潜行,还可以完成多次跨介质运动的无人航行器。但是由于水体环境和空气环境存在很大的差异,能够同时满足在2 种介质中运动并非易事。自20 世纪30 年代提出飞行潜艇设计理念以来,各国研究人员把目光投向潜空跨介质无人航行器的研发,取得了相当可观的成果。
1 国内外研究现状
1.1 国外研究现状
2016 年,奥克兰大学研发了一款名为“Loon Copter”的潜空跨介质无人航行器,如图1 所示[1]。其内部搭载储水舱用以调节航行器重量实现下潜与上浮,吸水下潜时,航行器通过所设计的压载系统重心不断左移,直到机身达到90°状态,然后由4 个螺旋桨推进实现水中的航行,空中的控制策略则是与四旋翼飞行器类似[1]。
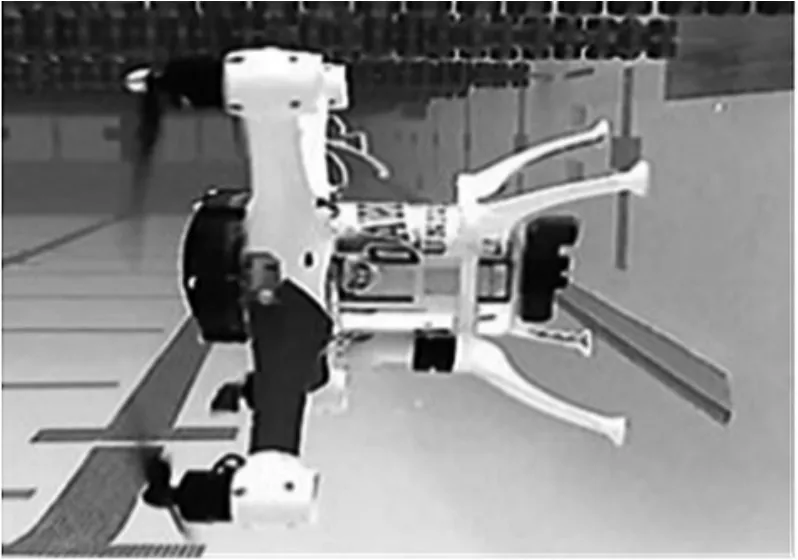
图1 “Loon copter”
2019 年,伦敦帝国理工学院公布了一款通过化学反应获得动力的潜空跨介质无人航行器,如图2 所示[2]。其从周围水环境中抽取少量的水注入一个装有电石粉(CaC2)的容器中,水与电石粉发生反应产生乙炔气体,乙炔气体溢出到燃烧室中被电弧点燃。该反应是高度放热的,腔室中温度和压力迅速增加,迫使反应所产生的水通过喷嘴离开燃烧室,产生离开水面所需的推力,每次仅消耗53 mg 的电石粉即可将160 g 的航行器喷射出水面[2]。

图2 伦敦帝国理工航行器
2021 年,瑞士苏黎世理工学院公布了一款名为“Dipper”的潜空跨介质无人航行器,如图3 所示[3]。该航行器在很大程度上受到了诸如塘鹅之类潜水鸟的启发,从空中入水的过程中,机翼会像潜水鸟的翼一样向后折叠,减小入水时的冲击力,水下航行时机翼也保持折叠状态。该航行器拥有空气螺旋桨和水下螺旋桨2 种推进装置,为了减轻机身的重量和体积,其并没有使用2 个单独的电机。在单个电机系统中,分别在电机两端各加装一个离合器就能够独立地控制水下螺旋桨和空气螺旋桨[3]。

图3 “Dipper”
1.2 国内研究现状
2015 年,北京航空航天大学设计了一款仿鲣鸟潜空两栖跨介质航行器,如图4 所示[4]。该航行器在机身最前端设置了空中推进器,是一对同轴反转螺旋桨,可以提供足够的动力将航行器推出水面,其水下推进器则是设置在航行器的末端。该航行器还设计了一个气球直立系统,系统配备了4 个气球、1 个用于充气和放气的气泵,通过对气球的充气和放气改变航行器的平均密度,从而实现潜水、上浮和姿态调整。新一代仿鲣鸟水空两栖跨介质航行器还是沿袭了上一代“飞鱼”航行器的可变后掠翼结构[4]。

图4 仿鲣鸟航行器
2022 年,上海交通大学发布了一款旋翼、固定翼与水下滑翔机相结合的潜空跨介质无人航行器“哪吒III”,如图5 所示[5]。空中飞行和悬停通过4 个旋翼和固定翼来实现,水下航行通过基于活塞的浮力控制系统来实现。其水下航行的原理是,当航行器降落在水面,活塞向内拉动,浮力降低,航行器以俯冲姿态下沉;到达水下一定位置时,活塞向外拉动,浮力提高,航行器上浮;航行器一直在锯齿路径中滑行,直到完成水下任务为止,滑行路径如图6 所示。这种高效且低功耗的水下推进装置极大地增加了航行器的航程[5]。上海交通大学还研发了“哪吒IV号”“哪吒-Mini”等潜空跨介质无人航行器。

图5 “哪吒III”
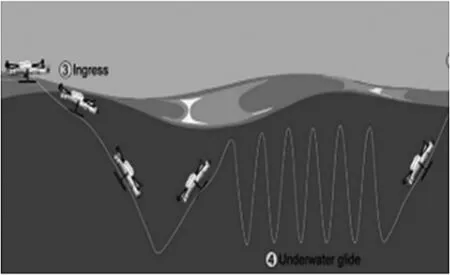
图6 水下运动轨迹
2 研究难点
2.1 能量来源
潜空跨介质无人航行器需要在水下航行,水下环境无法提供氧气,所以不能使用传统的燃料作为能量来源。早期的水下无人航行器以铅酸电池作为动力源,后来铅酸电池因为能量密度低、充电困难、质量大等缺点,不再用作水下无人航行器的动力源,后面所发展的银锌电池也因为成本高充电慢等原因没有被广泛使用[6]。锂离子电池具有能量密度高、循环使用寿命长等优点,成为现在潜空跨介质无人航行器运用最多的能量来源。另一方面,燃料电池具有极高的能量密度、不受卡诺循环限制的系统转换效率以及安静特性,有望作为一种可以替代锂离子电池的潜在能源,将显著提升水下运动的航程和工作时间[7]。目前已用于水下航行器的燃料电池有质子交换膜燃料电池、直接甲醇燃料电池和固体氧化物燃料电池等。
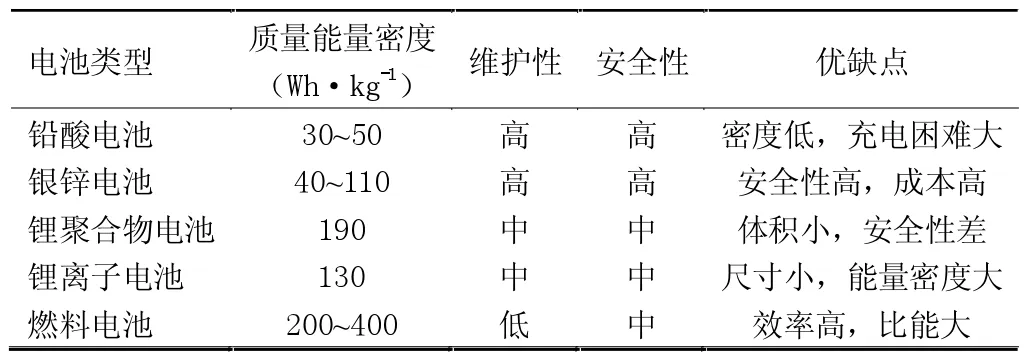
表1 水下航行器使用的电池类型特性比较
2.2 水空跨越问题
潜空跨介质无人航行器在空中飞行、水下潜航时与无人飞行器和水下航行器并无差别,核心问题就在于由水到空和由空入水跨介质的过程。航行器在水空混合交替反复的运动中,伴随着力和力矩突变、气液扰动及复杂的碰撞现象。这种多耦合、非线性、强扰动的物理过程会对航行器控制造成不利影响,从而严重制约介质跨越后航行器空中飞行、水下潜航的稳定性。从目前公布的样机来看,入水方式主要分为旋翼式航行器垂直降落和固定翼式航行器变体溅落,然后通过浮力调节装置或者推进器带动入水。溅落虽然速度较快,但是对航行器的结构强度和抗冲击能力要求较高。出水方式主要分为高压气体助力起飞、水面滑跑起飞和螺旋桨垂直起飞。螺旋桨起飞通常要通过一些浮力调节装置调整航行器的姿态,使螺旋桨离开水面,以便给航行器更好地提供动力。加之出水过程还会受到水面风浪影响,进一步增加了出水过程的随机性和不可控性。相对而言,出水难度比入水难度更大。因此,跨介质航行器水空一体化控制器设计需要作为水空跨越的关键问题深入研究分析。
2.3 通信技术
潜空跨介质无人航行器应该具备与地面控制端实时信息交互的能力。由于空气介质和水介质存在巨大差异,空中和水下的通信方式存在很大不同。空气介质以无线电通信为主,技术已经非常成熟。水介质对电磁波的衰减使得水下无线通信受到了极大的限制,水下多采用线缆通信或者水声通信。线缆不符合飞行要求,只能通过水声通信的方式进行操控。考虑到航行器的轻量化设计,研究微小型化的水声通信设备是未来实现水下远距离高速通信的关键。
3 未来应用
3.1 民用方面
潜空跨介质无人航行器可应用于灾情监测、水文取样、环境检测和桥梁检修等多个领域。其同时具备水中航行和空中飞行2 种能力,与单介质航行器相比,响应更快速,作业范围更广,适应能力更强。图7 为国外研究人员描绘成群的“AqualMAV”潜空跨介质无人航行器检测海上有毒物质泄露的设想图[8]。

图7 成群的“AqualMAV”检测海上有毒物质泄露
3.2 军用方面
在信息化战争时代,智能无人设备已经广泛运用在战场侦察、信息收集和数据分析等方面[9]。潜空跨介质无人航行器的任务范围涉及空气和水2 种介质,侦察监视和覆盖范围远远大于单一介质航行器。因为其特性使其具备持续收集水声信号、电磁信号、光电图像等情报数据的能力,可应用于爆炸物和生化武器的搜索定位、水下预警等多种任务场景[10]。潜空跨介质无人航行器还可以向低成本集群作战方向发展,利用其空中飞行速度快、水下航行隐蔽性强等特点,通过舰船或者潜艇释放几十架甚至数百架潜伏于水面之下,时机成熟后从水下升空迅速向敌人发起自杀式袭击,以雷达和武器作为首要攻击目标,给予敌人沉重打击。
4 结束语
本文介绍了近年国内外潜空跨介质无人航行器现有的研究成果,分析了研究过程中存在的一些技术难点。潜空跨介质无人航行器有着相当广阔的应用前景和发展潜力,目前只有极少数团队研发出了真正意义上可以多次跨越水空介质的航行器。水下无线通信、跨介质控制算法和续航时间等问题会是未来发展的重点。
