基于串级PID控制的三轮电磁循迹小车
2024-01-20程家驹孔凡斌王颖熙李伟伟
程家驹 孔凡斌 王颖熙 李伟伟

关键词:智能车;串级PID控制;电磁循迹;三轮车
中图分类号:TP23;TP273+.4 文献标识码:A
0引言
本文以第十八届全国大学生智能汽车竞赛为背景,基于负压电磁组设计一款快速、稳定的三轮电磁寻迹小车。电磁组竞赛的轨道中心是通有20kH/100 mA可变交流电源的漆包线,小车通过电磁感应原理,检测漆包线产生的交变磁场强度,利用控制器计算实际路径偏差以实现小车自动循迹。本文提出一款基于串级PID控制的三轮电磁循迹小车,利用串级控制内外环相互配合,有效克服二次擾动,改善动态特性,提高系统自适应能力。
1硬件系统设计
1.1硬件总体结构设计
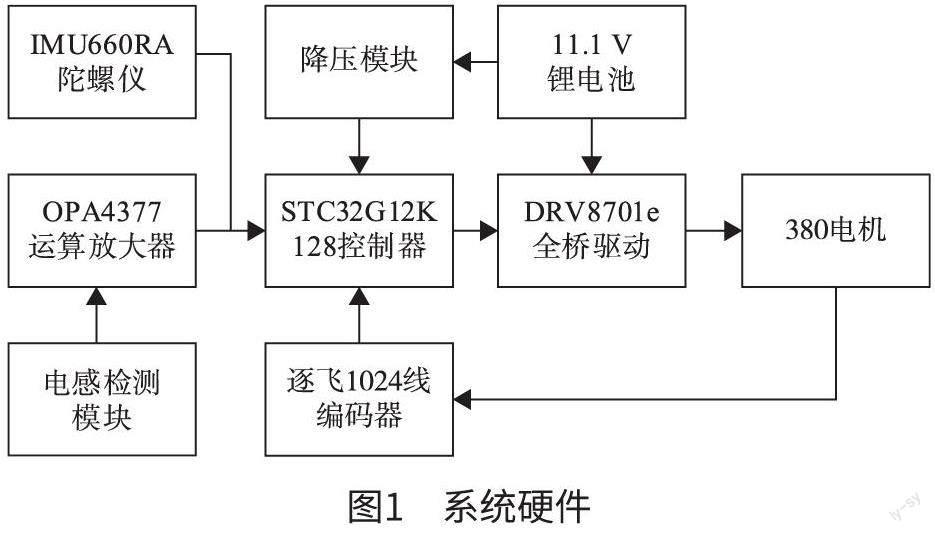
电磁循迹小车系统分为九大模块:主控制器模块、陀螺仪模块、运算放大器模块、电源模块、电感检测模块、编码测速模块、电机驱动模块、降压模块、电机模块。系统硬件如图1所示。
1.2信号采集与处理模块
为实现小车自动循迹功能,系统需要实时获取赛道信息并进行滤波放大以及AD/DA转换(模数/数模转换)。赛道中心铺设有电磁引导线。引导线是一条直径为0.1~1.0 mm的漆包线,其中通有20 kHz、100 mA的交变电流。根据毕奥一萨伐尔定律可知,与电磁引导线距离为r处的磁场强度为:
1.2.1电感排布方案
针对复杂赛道元素的特殊情况,电感的排布方案直接决定了赛道元素识别的精度。本系统采用如图2所示的电感阵列,该方案无元素判断死区,可提前判断十字赛道元素,也较易判断圆环赛道元素。
2软件部分设计方案
2.1电感偏差处理策略
2.1.1软件滤波与归一化
车模工作时,电磁干扰、线间串扰等会对单片机采集数据产生影响,导致所采集电磁强度出现异常。为了避免信号干扰对系统产生不稳定的影响,提高系统鲁棒性,需要进行滤波和赛道归一化处理。
1.2.2运算放大电路
由于谐振回路输出信号的幅值特性,本系统所选用的STC32G芯片无法直接对此类信号进行运算处理。因此选取德州仪器公司生产的OPA4377——低噪声、低静态电流、精密汽车级别四运放,对该信号进行运算放大与滤波处理。
1.3电机驱动模块
驱动电路的主要作用是给小车驱动电机提供控制和动力,本文采用两片DRV8701E组成一个H全桥电动机来驱动电路,驱动电路原理如图3所示。
本系统采取软件滤波,即对一路电感值采集5次,并对采集数据进行冒泡排序,去除最大值和最小值后取均值,均值即电感最终代入处理的有效值。此种滤波算法结合了中值滤波与均值滤波的优点,同时节省RAM(随机存取存储器)资源,有效提高单片机运行速率。通过归一化的方式,将不同赛道的电感值进行无量纲化,使有效值保持在0~100,最大限度地提高系统的适应能力。
2.1.2差比和差算法
经过软件滤波与归一化处理得到电感值,采用差比和差算法对小车与赛道中心的偏差进行拟合,以此计算出小车位置。差比和差公式如下:
其中,LM、RM分别为左中、右中两个电感值,L、R分别为左、右两个电感值,A、B、C为加权参数,P为比例系数。
2.2电机控制策略
2.2.1模糊PD算法
PID控制器是一种包含比例、积分和微分3个控制单元的线性控制器,PID参数是否精准直接影响控制系统的品质。模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,模糊控制器原理如图4所示,图中R为输入量,e为输入量偏差,Δε为偏差变化率,u为输出量。模糊PD算法主要原理:根据实时采集的数据,计算出系统当前与赛道实际偏差以及偏差的变化率,将偏差与偏差率进行模糊化处理,根据提前制定的模糊规则进行参数调整,最后通过反模糊化处理输出PID参数,实现动态PID参数修正,最大限度地减少静态误差,提高系统动态性能。故采取模糊PD对方向环进行控制。
2.2.2串级PID控制
由于系统采用三轮车模,方向控制与速度控制均通过左右两个电机实现,即通过输出不同PWM(脉宽调制)实现左右轮差速,进而实现前进、转向等功能。故将模糊PD算法以及增量式PI算法通过串级PID控制相耦合,即将两个控制器进行线性叠加,速度控制在方向控制的基础上进行,速度环作为串级PID控制系统外环,方向环作为内环。在定时器中将外环速度环设定为15 ms进行一次处理,将内环方向环设定为5 ms进行一次方向处理,内外环参数相互配合。串级PID控制如图5所示。
3结语
本文以三轮电磁寻迹小车为研究对象,对小车的整体系统进行介绍。改进传统PID算法,将模糊PD算法和增量式PI算法通过串级PID控制相耦合,有效提高三轮车的控制稳定性,提高系统鲁棒性。经过硬件设计、车模搭建、算法设计、程序编写实现了小车预期功能,验证了该方案可行性。
