自动驾驶汽车动力总成MAS集成控制及工作效率分析
2024-01-20杨慧荣
杨慧荣
关键词:自动驾驶汽车;动力总成;多智能体;集成控制
中图分类号:U469.7;TP18 文献标识码:A
0引言
动力总成控制系统属于自动驾驶汽车的一项核心组成部分,能够在满足驾驶性能需求的前提下,调控发动机和电机/电池组获得更优动力输出效果。现阶段,自动驾驶汽车(AV)所采用的动力总成控制方案包括基于优化与规则两种形式。通过结合优化算法和人工智能技术的方式,可以实现瞬时优化与全局调控的效果,还可以进一步提升人工智能的智能程度与高度的实时控制效果,这也成为AV动力总成控制的关键方式与重点研究内容。吴剑等根据等效油耗最低原理进行离线仿真测试获得AV能量瞬时最优集,再以此组成训练样本训练反向传播神经网络,从而确定神经网络能量管理方案,能够有效复现等效油耗控制效果,同时增强算法实时性。
多智能体系统(MAS)属于分布式人工智能分支,可以通过单个智能体控制方式与MAS交互、协调的方式实现复杂问题的求解分析。当前,多智能体已被应用于众多领域,在智能设计、充电调节、数据分析与融合、城市路网规划等领域都起到了重要作用,在条件优化、子系统协同等方面也具有显著优势。但以多智能体和优化算法相结合的方式来研究AV动力总成控制策略的内容较少。
本文通过构建等效燃油消耗模型,设计了一种AV动力总成多智能体集成控制方案,加入电辅助控制方式作为对比,对各工况条件下的车辆动力控制性能、排放量与油耗进行分析。
1 MAS体系结构
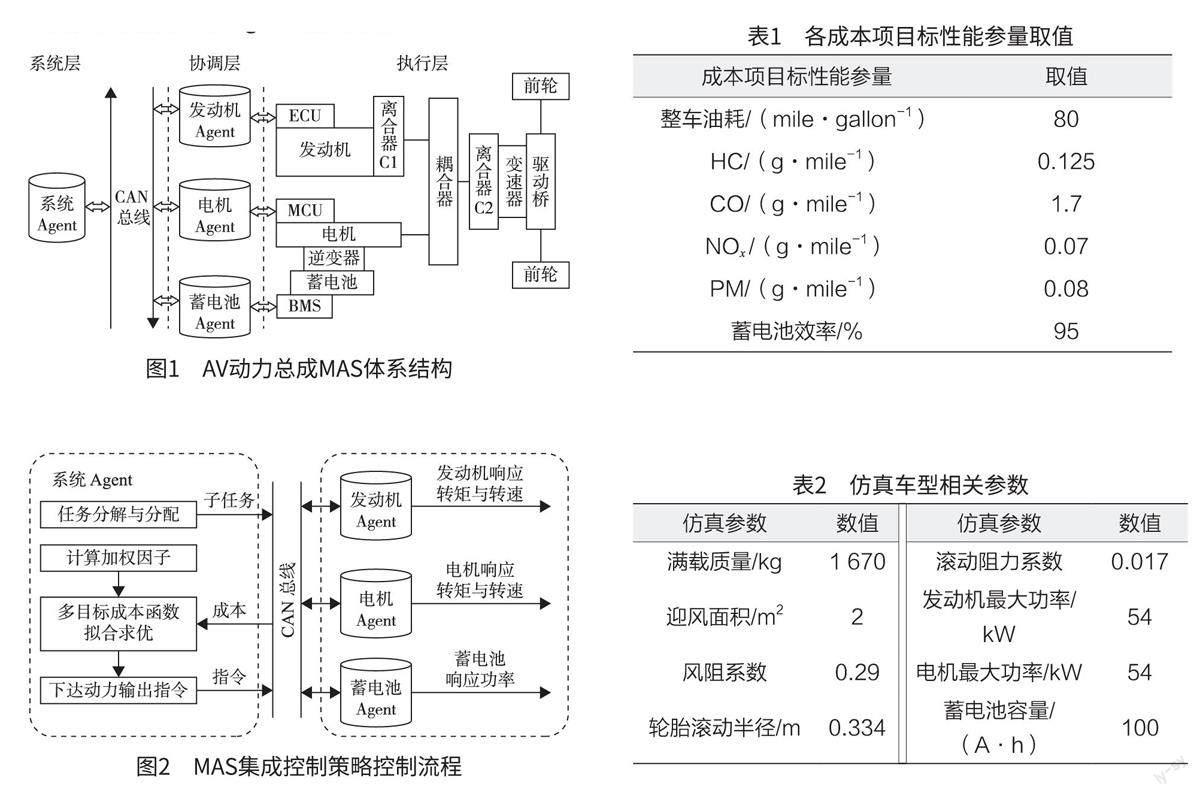
采用并联AV结构作为研究车型,其中,发动机和控制单元(ECU)、控制单元(MCU)与蓄电池控制系统(BMS)都保持独立的物理结构。为AV动力总成建立MAS系统,如图1所示,可以看到组成AV动力系统的MAS系统,系统层中存在系统Agent,通过动力总成任务的分解与算法优化过程实现动力初步响应控制,由此建立Agent信息交互与协作关系;发动机与ECU、电机与MCU以及蓄电池与BMS都位于执行层,实现工况数据的采集,并完成部件Agent动力指令。
2 MAS集成控制策略
MAS集成控制策略是一种根据工作效率与运行工况对初级动力请求进行响应的过程,其通过部件Agent来实现,跟其余部件Agent之間进行交互协调获得动力响应控制指令。图2为MAS集成控制策略控制流程。
要求油耗与排放指标满足当前国际排放标准,电池目标效率则根据蓄电池充放电曲线确定。随着蓄电池荷电状态(state of charge,SOC)值提高,充电效率呈现持续降低的趋势,但放电效率发生了相反的变化。当SOC介于0.4~0.6时,可以获得较高充放电效率,为获得更优的协调性能,需要在提升充放电效率的同时,降低能量损耗程度。此时需要尽量保障电池运行于中间SOC阶段,根据以上分析结果可以将电池目标效率设定在0.95,得到表1中各性能参数。
3控制策略仿真分析
3.1整车仿真模型
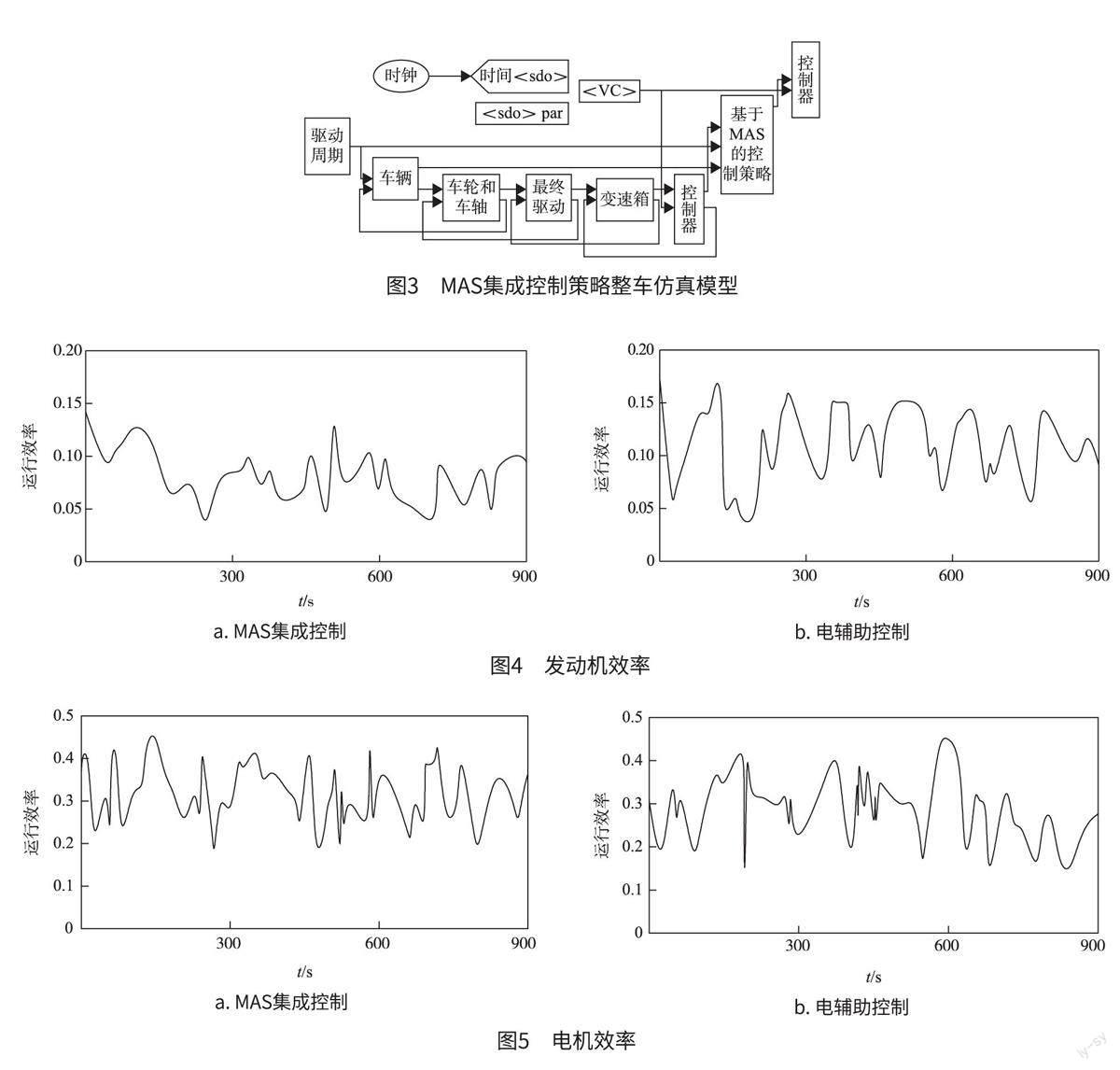
整车仿真测试得到的相关参数如表2所示。把MAS集成控制策略加入ADVISOR整车模型中,得到的结果如图3所示。所有部件Agent都跟动力部件进行连接,利用MAS集成控制策略获得最优发动机输出参数与电机转矩,同时控制蓄电池达到最优输出功率,再将结果传输至执行部件控制单元中,由此实现AV动力总成分配与集成控制的过程。
3.2工作效率仿真分析
进行新欧洲驾驶周期(new European driving cycle,NEDC)仿真时,依次对MAS集成控制与电辅助控制下的发动机与电动机效率开展仿真测试,由此判断不同控制方案的性能差异。图4和图5分别给出了在MAS集成控制下和在电辅助控制下的发动机与电机效率测试结果。
由图4可以看出,采用MAS集成控制策略时,发动机运行于效率区间[0.04,0.14]内;采用电辅助控制策略时,发动机运行于效率区间[0.04,0.17]内。相较于电辅助控制,MAS集成控制策略的发动机运行效率更为稳定,尤其是300~800 s内呈现更规律的分布状态,判断此时电动机已经达到了稳定的工况状态。如图5所示,MAS集成控制和电辅助控制对电机效率的影响差异不明显,MAS集成控制表现出稍微规律的分布状态。从总体上对比发现,综合发动机和电机效率控制精度方面,最大值从0.17控制到0.14,MAS集成控制相对电辅助控制在效率精度控制方面有所提高。
4结论
本文开展自动驾驶汽车动力总成MAS集成控制及工作效率分析,取得如下结果。
(1) MAS集成控制和电辅助控制电动机都形成了相近的工作点分布特点,800 s已经达到了稳定的工况。
(2)MAS集成控制发动机运行效率在区间
