汽车电子电气架构的发展及趋势
2024-01-17周伟陈旭乾葛成华
周伟,陈旭乾,葛成华
(中国电子科技集团公司第五十八研究所,江苏 无锡 214035)
0 引言
随着信息技术和人工智能技术的不断发展,汽车新四化(智能化、网联化、电动化及共享化)正引领汽车行业发生重要变革,汽车功能趋于多样化、复杂化,电子电气架构也在不断演进,特斯拉以及国内新势力蔚来、小鹏、理想等车企正在引领此变革,其他车企也正在进行整车电子架构的快速迭代[1]。
本文从硬件架构、软件架构和通信架构3 个维度阐述了汽车电子电气架构演进的方向和趋势,并分析了国内外主流汽车主机厂、供应商和芯片厂在各个阶段的产品布局情况。
1 汽车电子电气架构现状
电子电气架构(EEA)是集合了汽车的电子电气系统原理设计、中央电器盒设计、连接器设计、电子电气分配系统等设计为一体的整车电子电气解决方案的概念,由德尔福提出。电气架构的具体功能是把汽车中的各种传感器、电子控制单元(ECU)、线束和电子电气分配系统整合在一起完成运算、动力和能量的分配,进而实现整车的各项功能[2],电子电气架构包括电源管理、网络管理、数据管理、诊断管理等一系列电子电气解决方案。
EEA 这一概念不仅在汽车行业中存在,也在航空飞行器、工业自动化等行业的控制系统中广泛使用。EEA 的开发通常包含需求和逻辑功能定义、软件架构设计、硬件架构设计和线束设计等层面的开发活动。
传统分布式电子电气架构的设计思想为硬件定义规格,硬件架构采用控制局域网络(CAN)总线网络和分布式功能单元,采用单功能单控制器的设计,软硬件不能解耦,传感、控制器和算法都是专用的。传统分布式EEA 如图1 所示,传统分布式EEA 功能系统的核心是ECU,智能功能的升级依赖于ECU 数量的累加。
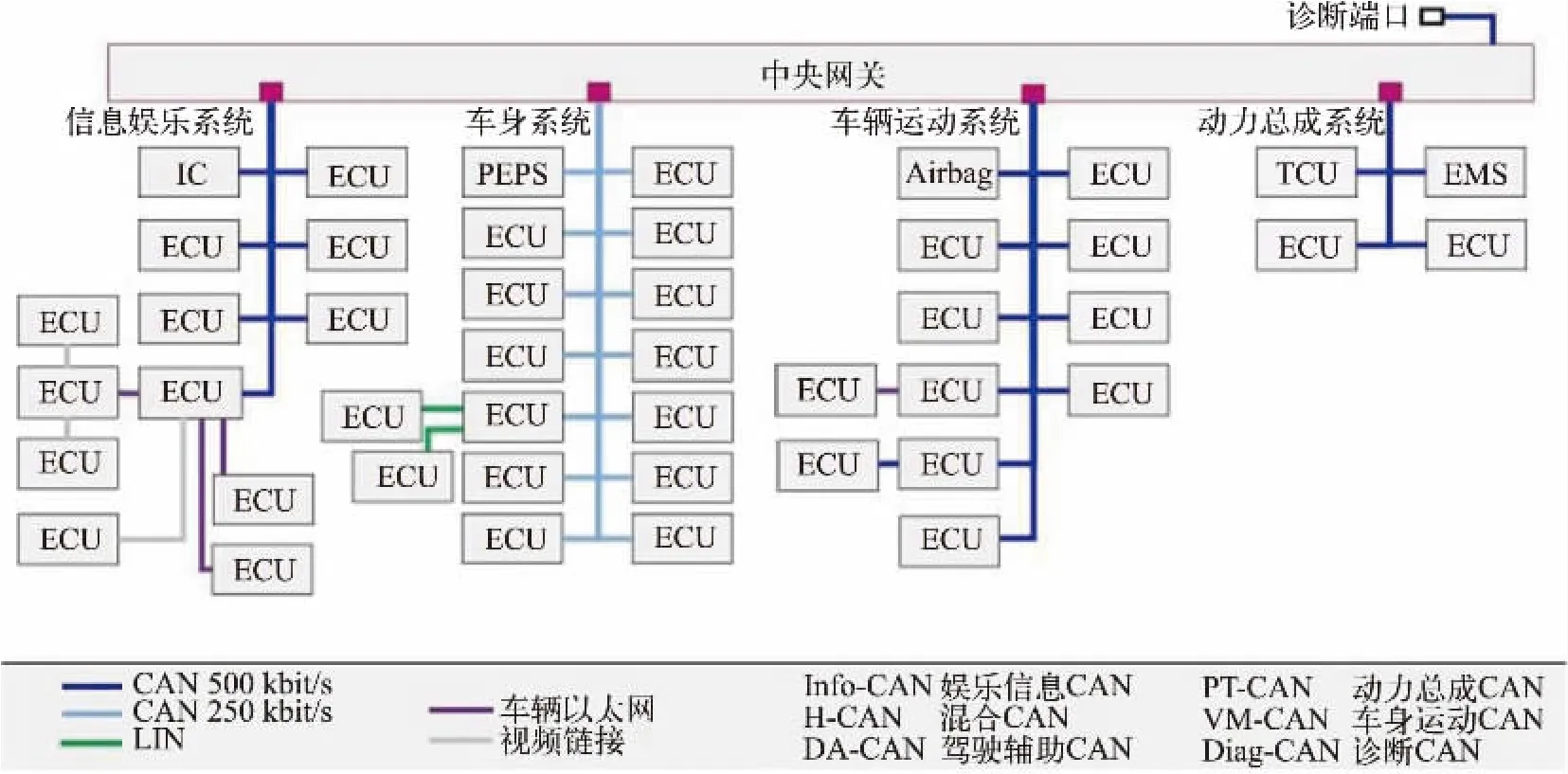
图1 传统分布式EEA
在软件定义汽车和汽车“新四化”的发展趋势下,传统的基于ECU 的分布式EEA 也日益暴露出许多问题。
1)总线的线束长度与重量问题。随着汽车功能的日益增加,搭载的ECU 数量也逐步增加,据统计,目前汽车中平均每辆车搭载的ECU 数量有50 个左右,部分高端车型ECU 数量甚至会超过100 个。ECU 数量越多,总线的线束长度和重量也必将大大增加。例如,奔驰S 级轿车的整车电子系统已经拥有超过80 个ECU,1 900 条总长度达4 km 的通信总线,而奥迪Q7和保时捷卡宴的总线长度已经突破6 km,总重量超过70 kg,基本是位列发动机之后全车第二重的部件。
2)系统复杂度超限。ECU 数量剧增之后,整车的电子电气系统硬件和软件的复杂度大大超过极限,导致整个系统缺乏灵活性和可扩展性。在如此复杂的系统中,增加一项新功能,相应的要增加一个ECU,往往会引起整个系统中多个环节的软硬件变更,这将极大地制约汽车智能化和网联化的发展速度。
3)通信带宽瓶颈。传统的汽车车载网络(CAN、LIN、FlexRay)总线带宽有限,随着汽车智能化的发展,车载内部网络通信的数据量激增。高级驾驶辅助系统(ADAS)的雷达和高清摄像头产生的数据量甚至超过了100 MB/s。因此,传统的CAN、LIN 和FlexRay 等低速总线已经无法提供所需的高带宽通信能力。
4)软硬件耦合紧密。ECU 与功能紧密绑定,无法完成多个ECU 和传感器的复杂功能耦合,不能支撑软件定义汽车的趋势,不能通过远程升级(OTA)更新相应的软件系统[3]。
综上所述,在汽车新四化的发展趋势下,传统的EE 架构显然已经无法满足日益增长的需求。这就要求电子电气架构进行变革,将众多功能单一的传感器集成为功能更强的传感器,按照功能域划分聚集,集成到域控制器架构中。这一变革促使汽车电子电气架构从分布式向集中式演进[3]。
2 汽车电子电气架构演进路线
2.1 硬件架构升级
由博世最早提出的汽车EEA 演进趋势如图2 所示,大致可分为3 个阶段:分布式EEA、域集中式EEA和中央集中式EEA,即分布式→域集中式→中央集中式的演进路线。
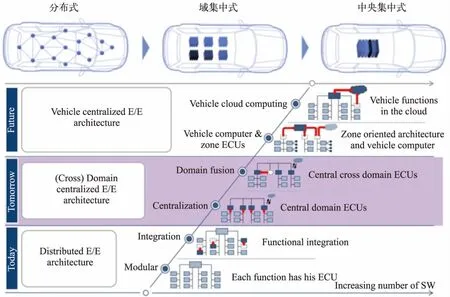
图2 汽车EEA 演进趋势[4]
当前正处于从分布式EEA 迈向域集中式EEA 的转变过程中,大部分传统主机厂仍然处于分布式架构阶段,而以特斯拉、蔚来、小鹏、理想为代表的新能源主机厂则直接部署域集中式/中央集中式架构,预计这一转变将在2025 年左右完成。2025 年以后,汽车架构将开启跨域的融合时代,也就是转变为中央+区域计算的EEA 时代。
随着模块化和集成化的进一步提高,出现了功能域的概念,而功能域的出现是域集中式EEA 的标志。从系统软硬件架构看,域集中式EEA 最直观的表现就是有了域控制器(DCU)来作为整个功能域的核心。
域集中式EEA 可以有效解决分布式EEA 存在的问题:1)按功能域集中部署,同时将传感与执行分开,传感器与ECU 不再一对一,管理更便捷,有效减少了ECU 和线束的数量,节约成本、降低装配难度;2)架构简洁、清晰,功能逻辑更强,引入车载以太网总线,提高了通信效率,实现软硬件结构的优化,便于整车OTA升级;3)进一步集中算力、减少冗余,满足更高阶的自动驾驶和智能座舱对于算力的高要求。
根据功能域的大小,域集中式EEA 又分为五域集中式EEA 和三域集中式EEA。常见的五域分为车身域、动力域、底盘域、ADAS 域、座舱域[3],五域集中式EEA 模型如图3 所示。

图3 五域集中式EEA 模型
随着主控处理器性能的增强和功能域的进一步集中,对与车身域、底盘域、动力域这一类主控需求类似的功能域可以进一步集成,即形成跨域集中式EEA[3],三域集中式EEA 模型如图4 所示。例如大众的纵置发动机模块化平台(MLB)把EEA 划分为ADAS 域、智能座舱域和车身控制域。华为的计算+通信架构由车身域控制器(VDC)、自动驾驶域控制器(ADC)、智能座舱域控制器(CDC)和网关等部件组成[5]。广汽推出的“星灵”EEA 有中央处理器、智能驾驶处理器、信息娱乐处理器3 大核心处理器群组[6],搭配高速Ethernet、5G 模组、信息安全和功能安全等技术,组成高效支撑插电混动、纯电车型的车云一体化集中式EEA[7]。

图4 三域集中式EEA 模型
在三域集中式EEA 中,涉及的域控制器主要有3类:车身域控制器、智能座舱域控制器、自动驾驶域控制器。其中车身域控制器负责车身控制,对安全和实时性的要求非常高;智能驾驶域控制器主要负责智能驾驶中的感知、规划、决策等功能的实现;智能座舱域控制器负责人机交互和智能座舱功能的实现[8]。
车身域控制器领域与传统的汽车一级、二级供应商以及零部件供应商耦合非常紧密,同时其安全要求很高,市场相对封闭。供应商集中于几个行业巨头,如伟世通、大陆、博世、联电等,而芯片供应商也集中于瑞萨、恩智浦、英飞凌、德州仪器、意法半导体等国际企业。整车控制域的芯片主要是以微控制单元(MCU)为主,强调低功耗、实时控制以及ASIL-D 功能安全等级等特性,软件主要以AutoSAR CP 平台为主。传统IT厂商以及新的一级供应商想要进入这一领域难度非常大,高等级的车规认证、高安全标准以及错综复杂的供应链是最大障碍。车身域控制器核心芯片一般为MCU,主要厂商信息如表1 所示。

表1 车身域控制器核心芯片(MCU)厂商信息(数据来源:Semicast Research、HIS)
智能座舱控制器芯片以SoC 芯片为主,这一领域是消费电子芯片厂商的强项。高通、英伟达、英特尔、三星、华为都加入了市场竞争,主要面向高端市场,传统汽车芯片厂商包括恩智浦、德州仪器、瑞萨等主要面向中低端市场。其中高通无论在产品竞争力还是高端市场占有率上都具备绝对领先优势,市场份额高达70%~80%,其中SA8155P 芯片已经成为旗舰车型标配,性能更强的SA8295P 芯片有望进一步巩固领先地位。瑞萨、恩智浦、三星、德州仪器等厂商市场份额紧随其后。国内芯片厂商也大力布局座舱域芯片,代表企业有芯驰科技、地平线、华为等。全球主要座舱域控制器芯片厂商及其代表SoC 芯片信息如表2 所示。
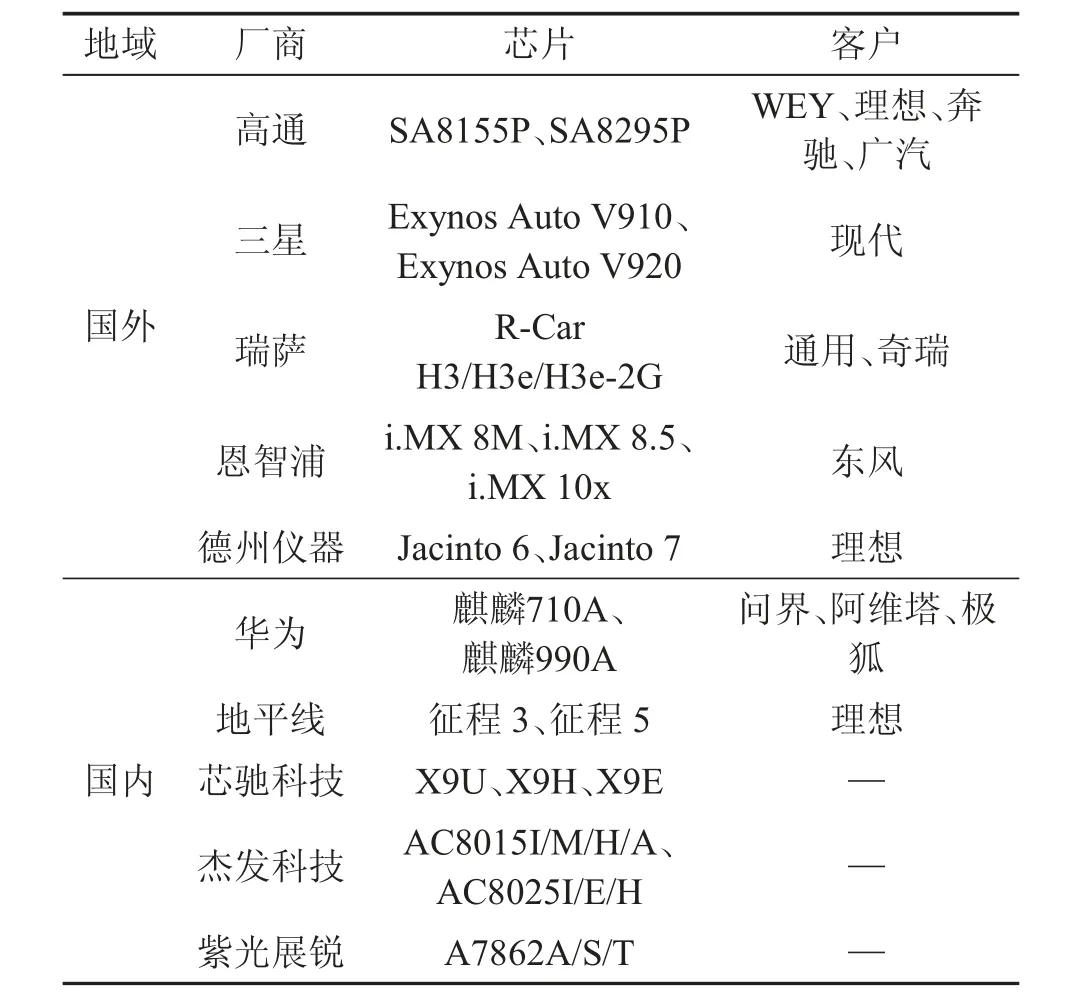
表2 全球主要座舱域控制器芯片厂商及其代表SoC 芯片信息(数据来源:盖世汽车、佐思汽研、IHS)
自动驾驶域控制器领域供应商主要有大陆、安波福、伟世通、博世、麦格纳、德赛西威、东软睿驰、经纬恒润等。自动驾驶域芯片需要强大算力和AI 性能,也是以SoC 芯片为主,目前英伟达和Mobileye 处于第一梯队,德州仪器、高通、华为、地平线处于第二梯队,上升势头较快。从对自动驾驶高算力需求满足情况看,只有少数厂商如英伟达、高通、华为、英特尔等拥有200 TOPS以上算力的自动驾驶域芯片。自动驾驶域控制器核心芯片厂商及其代表SoC 芯片信息如表3 所示。

表3 自动驾驶域控制器核心芯片厂商及其代表SoC 芯片信息(数据来源:盖世汽车、佐思汽研、IHS)
功能域进一步融合,域控制器将变为通用计算处理平台,即中央+区域式EEA,也称为中央集中式EEA[3],如图5 所示。车企中典型的代表有特斯拉和丰田的区域EEA,供应商中的代表有安波福的智能汽车架构(SVA)平台和伟世通的区域EEA。
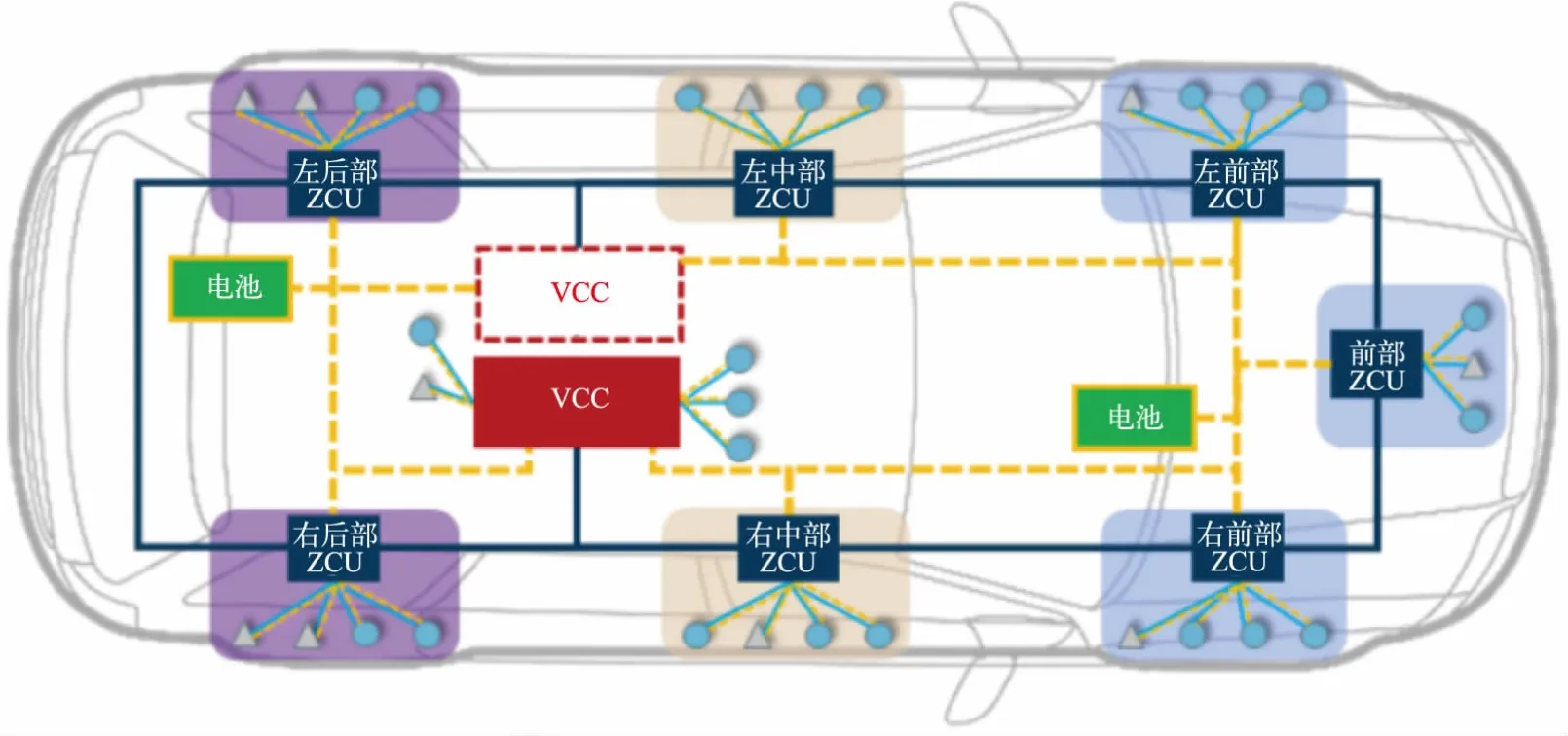
图5 中央集中式EEA[9]
中央集中式EEA 的特点主要体现在以下4 个方面。
车载中央计算机(VCC),多个VCC 组成一个异构服务器集群,作为一个通用计算平台(GCP),提供整车所需的计算、存储、通信和管理能力。因此,VCC 平台可以被看作是一个缩微版的数据中心服务器集群。
区域控制器平台(ZCU),每个区域会有一个ZCU负责实现某个局部的感知、数据处理、控制与执行,并负责本区域内传感器数据的初步计算和处理,它本身也具有网关的协议转换功能,负责本区域内的网络协议转换。
两级通信网络由以太网+时间敏感网络(TSN)组成的骨干网及CAN、LIN、10Base-T1s 区域网构成[10]。TSN 以太网作为整车通信的骨干网,具备高带宽、低延时、低抖动、高可靠性、高安全性等特点。而在区域内部,ZCU 与ECU、传感器之间的通信仍然采用传统的CAN、LIN、10Base-T1s 等中低速总线。
分级供电网络分为双电源冗余供电及区域内智能分级供电。整车部署2 个电源,输送电力到中央计算机和各个区域控制器,通过环形组网实现冗余供电,提高可靠性。由区域控制器负责将电力继续向下输送到执行器和传感器,同时要求区域控制器具备电源管理等功能[9]。
总而言之,分布式EEA 是计算的分布式、供电的集中式;而中央+区域式EEA 正好相反,即供电的分布式、计算的集中式。区域式EEA 不仅能将计算资源集中,便于软硬件分离,也给整车各个控制器的电源管理带来新的可能。而ZCU 作为分级通信和分级供电的区域节点在整个体系中扮演了非常关键的角色[9]。
2.2 软件架构升级
在传统汽车软件架构设计中,嵌入式软件与硬件耦合度高,软件严重依赖于硬件,软件重用性极差、硬件平台各式各样,难以统一、重用,导致软件模块化极其受限。同时,在传统的分布式EEA 中,汽车采用的是“面向信号”的软件架构,ECU 之间通过LIN/CAN 等总线进行点对点的通信。
EEA 从分布式演进到域集中式和中央集中式架构后,软件架构需要解决软件复杂度提升、功能迭代频繁的问题[11]。面向服务的架构设计(SOA)解决了汽车EEA 面临的各种挑战,得到广泛应用[8],这就为实现软件定义汽车奠定了基础。
SOA 是遵循服务导向原则的可重用构建复杂软件系统的方法。软件架构并非一类特定的软件产品,而是一种软件架构设计的理念,SOA 层级架构模型如图6 所示,其核心思想是将每个控制器的底层功能以“服务”的形式进行封装,一个服务即是一个独立可执行的软件组件,并对其赋予特定的IP 地址和标准化的接口以便随时调用,最终通过对这些底层功能的自由组合,实现某项复杂的智能化功能[12]。其中操作系统支持主流的Android、Linux/QNX、实时操作系统(RTOS)等。
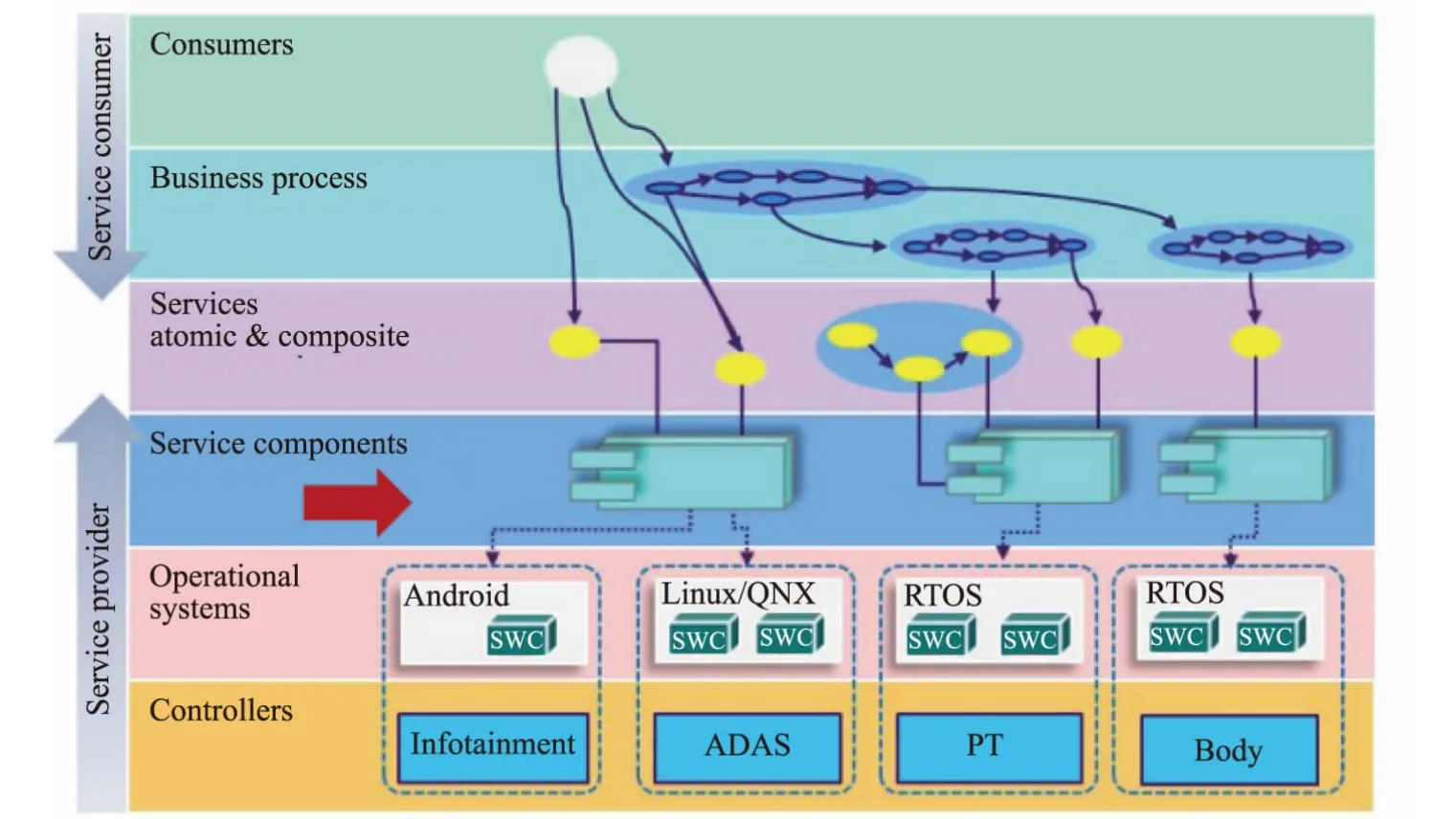
图6 SOA 层级架构模型[13]
SOA 的特点是松耦合性、路径透明、可复用、标准化。SOA 在IT 行业中已经使用了多年,旨在描述和构建分布式系统。同时,面向服务的架构设计在汽车工业中也变得极为重要。比如,SOA 能够将各种新功能灵活地与互联网集成;能够实现更高效的车载自动诊断系统(OBD)及空中下载技术软件升级,有助于实现各种远程诊断、预诊断功能;能够大幅提升影音娱乐功能的用户体验感;能够实现不同平台间的各种APP共享功能;更便于实现平台架构升级。各个服务可以由不同团队独立开发,可以缩短车辆开发时间,甚至可以由一级供应商提供底层平台及接口,主机厂进行应用软件的开发,可以更高效地进行合作[14]。
综上所述,软件架构升级有利于软硬件解耦分层,有利于实现软件/固件在线升级、功能软件可移植、应用软件可移植、操作系统可移植,有利于采集数据信息、实现多功能应用,有效减少硬件需求量,真正实现软件定义汽车。
2.3 通信架构升级
传统汽车总线技术包括CAN、LIN、FlexRay、多媒体系统传输(MOST)总线等,其中CAN、LIN 总线应用非常广泛,FlexRay 总线率先实现了实时性的时间触发机制和无缝冗余,MOST 总线则主要应用在多媒体业务。
CAN 总线是目前车载应用最为广泛的总线协议,但最高传输速率仅为1 Mbit/s,面对越来越多的车载电子系统,传统的CAN 总线无法提供足够的传输速率和带宽。与安全相关的如油门、刹车踏板、悬挂等控制信令仍然采用CAN 总线传输。
LIN 总线是针对汽车分布式电子系统而定义的一种低成本的串行通信网络,是对CAN 等车载总线的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用场景[15],如灯光、车门、遥控等通常采用LIN 系统[16]。
FlexRay 总线有2 个信道,每个信道上的数据速率最高可达10 Mbit/s,总数据速率可达到20 Mbit/s,能满足L2 级自动驾驶需求,但无法满足更高级别的ADAS 需求,TSN 标准里最核心的时间触发机制和无缝冗余理念都来自FlexRay 总线。
MOST 总线是专门针对车内环境而开发的、服务于多媒体应用的数据总线技术,其带宽最高可达150 Mbit/s,但无法保证实时性。
不同车载总线的数据速率与成本对比情况如图7所示,可以看到,传统的CAN、LIN 总线成本很低,但是难以满足日益增长的高速带宽需求,MOST、FlexRay 总线由于私有化等原因,成本较高,而车载以太网在高带宽、标准化、成本控制方面有很大的优势。
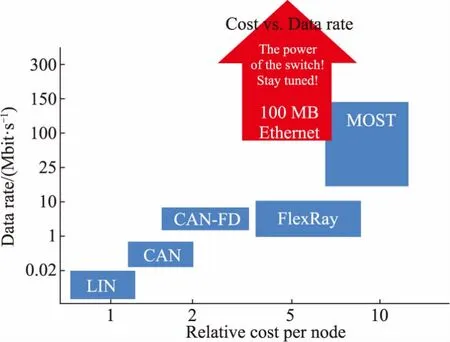
图7 不同车载总线的数据速率与成本对比
随着高级驾驶辅助系统以及汽车信息服务系统的发展,常用的车载网络总线CAN、LIN、MOST 等将无法满足汽车功能的需求,进而影响到汽车关键系统的实时性、可靠性和安全性。
车载网络总线发展进程如表4 所示,车载网络骨干由CAN/LIN/FlexRay 等传统总线向以太网演进。智能座舱、自动驾驶等技术需要以更快速度采集并处理更多数据,传统汽车总线无法满足低延时、高吞吐量的要求。因此,集高带宽、低延时等诸多优点于一体的以太网有望成为未来车载网络骨干。
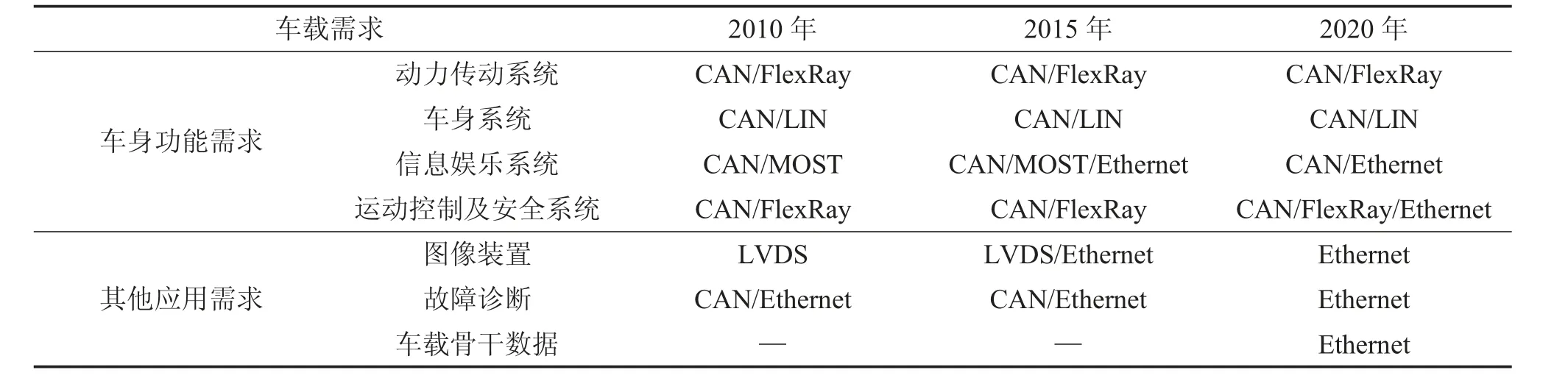
表4 车载网络总线发展进程
针对传统以太网的不确定性、传输延迟等问题,IEEE 提出了TSN 等一系列标准。TSN 技术基于传统的非实时以太网,继承其带宽大、扩展强、新技术多的优势。在此基础上通过时间同步(如IEEE802.1AS)、数据调度(如IEEE802.1Qbv)、网络配置(如IEEE802.1Qcc)等一系列技术手段实现了车载网络要求的实时性、可靠性和安全性。
TSN 技术与车载需求结合在一起,呈现出蓬勃发展的态势。开展TSN 技术研究的主机厂有特斯拉、宝马、奥迪、广汽、理想等,芯片厂商有博通、美满、恩智浦、瑞萨、芯驰科技等,目前国内外已有多家汽车企业,包括宝马、特斯拉、奥迪、广汽等开始使用TSN 车载芯片,测试车载TSN 技术。
综上所述,通信架构升级的主要趋势是CAN、LIN总线向以太网方向发展,可满足高速传输、低延时等性能需求,同时线束更短,可减少安装、测试成本。
3 全新架构下的机遇与挑战
随着自动驾驶、智能座舱等功能的逐步推广应用,基于环形主干网和多计算中心的架构方案在网络安全、冗余备份等方面更具优势,能够提供高带宽、低延时、低抖动的关键业务确定性传输能力,在技术上也更具有挑战性。
具体到新EEA 中的关键设备层面,域(车身域、智能座舱域、自动驾驶域)控制器、中央计算单元、区域控制器都将是未来主机厂、一级供应商、芯片厂商和软件厂商争夺最激烈的领域。在EEA 的2.0 和3.0 阶段,车载通信骨干网从传统总线技术(CAN、LIN、FlexRay) 逐渐向以太网技术转变,车载以太网、100/1000Base-T1、TSN 等新技术得以应用。恩智浦、博通、美满、芯驰科技都推出了车载以太网TSN 交换芯片、100/1000Base-T1 PHY 芯片,以抢占车载以太网市场先机。
在传统的动力、底盘域方面需要对车本身有深入的理解,尤其是底盘域,对安全性要求非常高。传统的国外汽车电子行业巨头(恩智浦、瑞萨、德州仪器、博世、大陆)依然把控话语权,但是国内企业也向它们发出了强有力的挑战,杰发科技、国芯科技、比亚迪半导体、兆易创新、芯驰科技等国内芯片厂都陆续推出了车规级MCU,并成功地将其应用到电池管理系统、车机液晶仪表、车灯控制、车身控制、发动机控制等领域,它们凭借更高的性价比逐步抢占传统动力、底盘域的市场空间。而在自动驾驶、智能座舱领域,由于其与传统供应链、车身、底盘等安全模块的耦合关系不紧密,同时对于新技术、算力、软件、创新等方面的要求高,国内外的主机厂、芯片厂、供应商几乎处于同一起跑线。得益于国内企业在IT 行业的技术积累以及对于新需求更高、更快的响应能力,这一领域迎来了国产替代的最佳机会。例如,华为从传统的IT 企业切入自动驾驶、智能座舱和多合一电机等领域,芯驰科技成为集网关芯片、自动驾驶芯片、智能座舱芯片和高性能MCU 于一身的国产汽车芯片新锐,经纬恒润从车身域切入自动驾驶域,德赛西威和华阳集团从座舱域切入智能驾驶域,均胜电子从功能件切入智能座舱域+自动驾驶域,中科创达从操作系统切入智能座舱域+自动驾驶域等,都印证了国内厂商在这一领域的突破[17]。
随着新能源汽车以及新的EEA 的发展,主机厂也逐步从完全依赖供应商提供“交钥匙”产品向主导软硬件研发、全栈自研的方向转变,尤其是新势力车企在软件研发方面投入大量资源,逐步提高了自身在产品定义方面的话语权和产品技术方面的护城河。
4 结束语
如今,汽车行业发展迅猛,电子电气架构不断演进升级,基于域控制器架构和中央集中式架构的汽车电子技术和产品将是汽车行业发展的重要领域。新能源造车新势力纷纷推出相关产品,占据了领先位置。芯片厂商、IT 厂商也加大投入,逐渐改变了传统的供应商模式,直接与主机厂合作推出更具竞争力的系统一体化解决方案。而传统的主机厂商如何从现有的分布式架构向域控制器架构和中央集中式架构转变,如何介入到产品的研发和系统方案中去,也是值得思考的一个问题。汽车电子电气架构是汽车行业转型的第一步,随之而来的还有操作系统、生态建设等等,种种因素势必会推动整个汽车行业产业链的全面升级。