沅水流域水电站外部变形监测自动化方案探讨
2024-01-17桑兴旭SANGXingxu肖维XIAOWei杨松林YANGSonglin
桑兴旭 SANG Xing-xu;肖维 XIAO Wei;杨松林 YANG Song-lin
(湖南五凌电力科技有限公司,长沙 410118)
0 引言
沅水流域处于云贵高原东部边缘与雪峰山、武陵山脉交接地区。流域内水电站主要有五强溪水电站、三板溪水电站、挂治水电站、白市水电站、洪江水电站和托口水电站等多个水电站。各水电站之间距离远,外观测点多且分散,采用人工观测方法劳动强度大、效率低,难以保证数据的可靠、实时和一致性,且在遇强降雨、洪水、水库高水位、地震等特殊情况无法实现自动预警[1]。建立一套功能齐全、稳定可靠、使用方便的外观变形监测自动化系统,可以快速完成表面位移测点数据采集工作,做到相关量同步测读,能够胜任多测点、密测次和减少人工干预数据的要求,及时对所采集的监测数据按需要的深度进行实时分析和报表生成,作为各级相关人员决策的重要参考依据,发现问题及时采取相应措施,防范于未然[2]。
1 工程概况
本文所提水电站均位于沅水干流,分布于湖南、贵州省境内。其中五强溪水电站位于沅陵县境内的沅水干流中下游,上游距沅陵县城73km,下游距常德市130km。水库总库容43.5 亿m3,正常蓄水位108.00m,属季调节水库。电站装机5 台,总装机容量1200MW(5×240MW),设计多年平均发电量53.7 亿kW·h。五强溪枢纽建筑物有混凝土重力坝、坝后式厂房和三级船闸。五强溪水电站库区内主要监测部位包括左岸高边坡和扩机工程边坡。三板溪水电站位于贵州省锦屏县境内,下距锦屏县城25km,总装机容量1000MW,多年平均发电量24.28 亿kW·h。水库正常蓄水位475.00m,相应库容34.48 亿m3,总库容40.94 亿m3,调节库容26.16 亿m3,为Ⅰ等大(1)型工程。三板溪水电站主要监测部位包括主坝坝体、副坝坝体、主坝右坝肩高边坡、泄洪洞进出口边坡、溢洪道泄槽左边坡、进水口开挖边坡、进水口崩塌体、近坝库岸边坡。
2 外部变形监测自动化方法及测试
目前,水电工程领域外部变形监测自动化主要采用GNSS(Global Navigation Satellite System,全球导航卫星系统)监测系统和测量机器人监测系统两种方法[3][4]。
2.1 自动化监测方法 全球导航卫星系统GNSS(Global Navigation Satellite System)泛指所有的卫星导航系统,主要包括美国GPS 系统、俄罗斯Glonass 系统、欧洲Galileo 系统及中国北斗卫星导航系统。
GNSS 系统在水电站自动化监测的优点包括:①监测点与基准点之间无需通视;②基本不受天气影响(例如大雨、浓雾、泄洪雾化、烈日等),可以实现全天候观测;③监测及分析速度快,可实现自动化实时监测。同时,可根据需要解算出不同精度的数据(解算数据时间段越长,精度越高);④监测距离长,最长可达15km;在开阔区域,监测边长在3km 左右,24 小时解算成果理想情况下能达到2mm左右的精度。
同时,GNSS 系统测量原理决定了其信号接收及精度会受到各种环境因素的影响,其缺点主要有:①对观测环境有较高要求,需要对天的观测视野角度大(开阔度)、周围的多路径效应影响小(周边物体是否对GNSS 天线有遮挡、天线同高度附近无较大镜面物体或水面)、周边无强电磁场干扰等;②实时解算精度较差,如几秒钟或1 分钟解算一个成果,只能达到厘米级精度,难以满足规范对于大坝和枢纽区边坡±1mm~2mm 精度的要求;③受大气电离层误差影响,高程解算精度低于平面解算精度;④单点造价高,每增加一个监测点,需要增加一套完整的GNSS 设备。
测量机器人即全自动跟踪全站仪,是在传统全站仪基础上,增加了目标自动照准和伺服马达技术,实现了对监测目标的自动采集、读数和分析,是传统大地测量技术与现代机电技术的结合。
测量机器人系统的优点包括:①技术成熟,应用广泛。其测量原理与传统大地测量一致,在水电工程领域有着广泛的应用;②测量精度高。实际工程试验表明,观测条件良好的情况下,在1km 范围内可实现1mm 以内的测量精度;③在监测区域布设有大量监测点的情况下,工程造价低于GNSS。每增加一个监测点,只需要增加一套监测棱镜。
相对于GNSS 系统,测量机器人系统的缺点主要有:①基于激光测距原理,监测点与基准点必须满足通视要求;②日常观测受气候影响较大,大雨、浓雾、泄洪雾化、烈日等气候条件均会对测量的精度造成影响,甚至无法完成观测;③高精度测量条件要求高,理想的测量距离在1km以内,仰俯角控制在15 度内,每个测点能配置2 个及以上的后视基准点;④基准站点造价高,在测点较少的水电站,测点平均造价高。
2.2 各水电站外部变形监测自动化测试 由于测量机器人监测系统观测精度受通视条件及俯仰角影响较大,GNSS 监测系统观测精度受信号接收精度影响较大,为确保所选用监测方法满足规范精度要求,对各水电站测点与监测控制网点间通视情况和GNSS 信号接收精度分别进行现场调查和测试。GNSS 信号接收精度统计见表1,沅江流域各水电站表面变形测点与变形监测控制网点通视情况统计见表2。

表1 GNSS 测点信号接收精度情况表
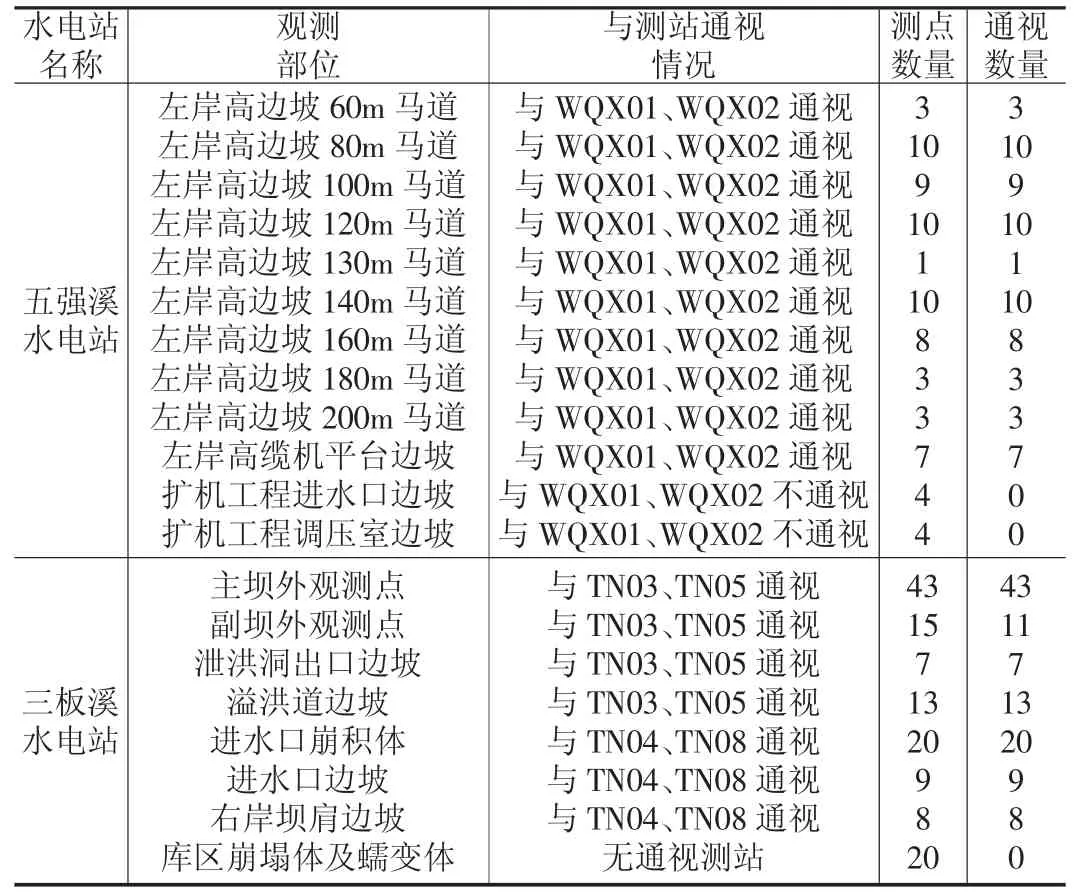
表2 沅江流域各水电站表面变形测点通视情况表
根据现场通视条件调查结果可知,五强溪水电站和三板溪水电站测点数量较多且大部分测点与变形监测控制网点通视条件良好,只有不在控制网覆盖范围内的近坝库岸崩塌体及蠕变体和工程边坡少部分测点无法通视。根据现场GNSS 测点信号接收精度可知,各电站GNSS 信号接收精度均满足要求,且都具备多路径效应和周跳比良好、数据完整率为90%以上的测点。
3 系统设计
3.1 外部变形自动化监测系统结构 沅水流域水各电站外部变形监测监测范围主要包括大坝外部变形监测和边坡外部变形监测两个方面。外部变形监测自动化系统由三部分组成:现场感知和采集系统、通讯供电及防雷设备(数据传输层)、安全监控与监测信息管理系统(数据应用和管理),根据全方位、高精度、实时自动化的监测要求及工程实际,本工程外部变形监测自动化网络采用分布式网络结构,如图1 所示。

图1 工程外部变形监测自动化系统网络结构
3.2 监测模式选取 本文分别以三板溪水电站和挂治水电站为例对两种监测模式选取进行详细描述。
3.2.1 综合监测模式 根据现场查勘情况,综合考虑现场环境、通视条件、外观自动化经济性和合理性,三板溪水电站拟布置3 台测量机器人作为外部变形监测自动化基本方案,GNSS 系统作为补充观测方案。测量机器人测站位置分别位于大坝工作基点TN08、左岸三板溪纪念碑和网点TN03 处,编号分别为SBX01、SBX02 和SBX03,测站位置示意见图2。
三板溪水电站大坝及工程边坡纳入外观自动化改造的共有115 个测点。由于坝前表面变形监测点SA6-1 与各测站点不通视,故该处采用GNSS 进行自动化观测。其余114 个测点采用测量机器人观测。对于具有2 个及以上测量机器人观测站可通视的观测点,选择交会法进行观测;对于仅有1 个测站可通视的监测点使用极坐标法进行观测。其中,80 个测点采用交会法观测,34 个测点采用极坐标法观测。交会测点和后视点采用同轴棱镜,极坐标法测点采用圆棱镜。
近坝库岸崩塌体及蠕变体因测点与控制网点间无法通视,选择GNSS 系统作为该区域外部变形监测自动化方案。同时,为保证在暴雨或烈日高温等极端工况下大坝表面变形监测数据的及时性,并和测量机器人监测数据相互验证,在坝顶表面变形测点同时安装GNSS 设备(共布设14 套GNSS 设备),坝顶表面变形测点采用测量机器人和GNSS 双重监测手段。
3.2.2 GNSS 单独监测模式 挂治水电站在左岸边坡设1 个监测断面,共布设4 个水平位移和垂直位移测点。根据现场查勘情况,综合考虑稳定性、外观自动化经济性和合理性,挂治水电站拟在平面监测控制网网点TG13 处布置GNSS 测量基准站,测站位置示意见图3。GNSS 测量基准站稳定性采用变形监测控制网复测手段校测。GNSS测量基准站位于平面监测控制网的网点上或改造为同基础观测墩,控制网复测可以达到校核GNSS 测量基准站稳定性的目的。

图3 挂治水电站左岸边坡自动化监测布置图
3.3 系统通信 根据系统总体网络结构以及现场监测仪器情况,系统各级之间的通信设置如下:①测量机器人变形监测自动化系统均采用4G 无线方式进行通讯;②GNSS 监测系统采用4G 无线方式进行通讯,4G 无线通讯构建虚拟专用网,采用虚拟专用拨号网络传输方式,各终端通过专用服务器身份认证授权使用,保证传输数据安全性。
3.4 系统防雷过电压保护 沅水流域各水电站工程所在地雨季常有雷电,为确保监测自动化系统能够安全稳定运行,必须采取相应的措施防止雷电对监测自动化系统造成破坏,具体可从系统接地、电源防雷和通信防雷三个方面实施。①由于观测站所处位置较空旷,为防建筑物受直接雷击,按三类建筑物防雷要求,站房屋面均装设接闪带。②为保证人身与设备安全,所有电力设备均应可靠接地,其中低压配电系统采用TN-S(5 芯进线)制接地型式。③建筑物内电气设备与建筑物防雷接地共用一个接地装置,接地电阻要求不大于4Ω。接地装置主要利用各种水工基础钢筋、金属结构作为自然接地体,分多点用扁钢(-40×4)引上与不同高程上接地干线连接。
4 结论
针对本文所提沅水干流6 座水电站外部变形监测自动化系统方案,取得以下结论:
①根据现场通视条件调查GNSS 信号测试成果,针对五强溪水电站、三板溪水电站外部变形测点较多且分散、少部分测点无法通视的特点,为减少工程投资,选取精度更高、单测点造价更低的测量机器人系统作为表面变形监测自动化基本方案,GNSS 系统作为补充观测方案,即测量机器人和GNSS 联合测量的综合监测模式。
②挂治水电站、白市水电站、洪江水电站和托口水电站测点相对较少且较为集中,设置测量机器人基准站造价高,故选取GNSS 系统作为表面变形监测自动化方案,及GNSS 单独监测模式。
③外部变形监测自动化模式的选取需根据监测对象测点布置情况、通视条件、经济性和合理性进行综合评估。
④两种外部变形自动化监测系统通讯均可采用4G 无线网络,同时为确保监测自动化系统能够安全稳定运行,必须采取防雷措施。
