18650 型锂电池安全性识别
2024-01-17朱家慧张博利
张 威,朱家慧,王 琼,张博利
(1.中国民航大学a.航空工程学院;b.安全科学与工程学院;c.理学院;d.基础实验中心,天津 300300;2.民航航空公司人工智能重点实验室,天津 300300;3.中国民航航空地面特种设备研究基地,天津 300300)
鉴于世界范围内锂电池造成的火灾事故层出不穷,国内外对锂电池的安全性展开了一系列研究。基于前人对锂电池热失控的研究可知,锂电池热失控时内部凝胶卷结构会发生显著的气体诱导分层、电极层坍塌、结构降解和体积膨胀[1-3],电池内的放热过程导致温度不受控制地升高[4],极端的热和电条件会导致电极材料活性物质的颗粒形态、粒度分布和比表面积发生变化[2],也会导致挥发性溶剂产生气体释放[5],其中结构变化和温度变化分别能在三维显微CT(computed tomography)扫描仪和热成像仪中观察到,所以针对该问题进行图像处理具有重要的研究意义。目前国内外对于锂电池图像处理的研究基本上都是对电池外观缺陷[6-9]和电池极片缺陷[10-13]进行处理,而对热失控前锂电池内部发生结构变化的识别相对较少。而容易产生热失控并爆炸起火的锂电池的典型特征大体分为两种:一种为凝胶卷结构产生褶皱,另一种为电极材料产生分解、安全阀打开[14]。目前安检人员在人员流动的高峰期工作强度大,且锂电池航空运输的安全风险较高,因此在航空领域中实现锂电池检测的自动化就显得尤为重要。为了加强此领域的研究应用,本文以18650 型锂电池为例,通过设计一种图像处理方法,以凝胶卷产生褶皱的锂电池、电极材料产生分解的锂电池和标准锂电池为典型研究对象,利用三维显微CT 扫描仪对锂电池内部结构变化进行对比,捕捉容易产生热失控并爆炸起火的锂电池的典型特征,并进行特征的提取和选择,排列组合成特征向量后送入分类器进行训练和分类,最终选择出分类结果最优的特征向量和分类器组合投入实际应用。
1 锂电池检测算法
1.1 SVM 迁移学习算法
文献[11]利用支持向量机(SVM,support vector machine)迁移学习算法对锂电池X 光影像中的电极褶皱进行检测,SVM 迁移学习算法的流程如图1 所示。
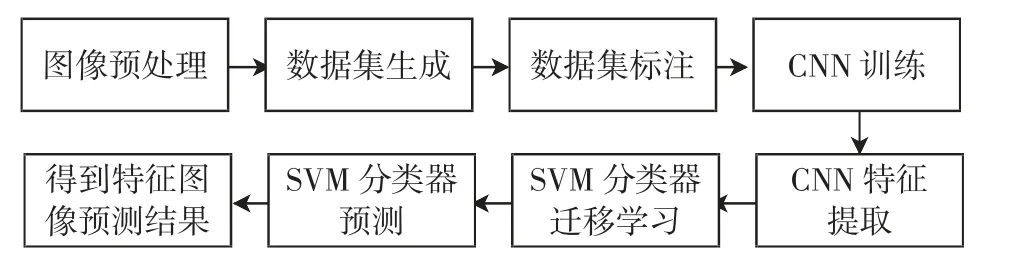
图1 SVM 迁移学习算法流程图Fig.1 Flow chart of SVM migration learning algorithm
首先对电极图像进行预处理,获得电池电极有效区域图像;再扩大数据集的规模,对图像进行旋转和裁剪,得到500 倍于原图像数量的候选子图;之后以人工标注与自动分类相结合的方法对所有图像进行数据集标注,其中对电池电极图像进行人工标注,以人工标注为基础通过一定的阈值算法对候选子图进行自动分类;再把小尺寸的候选子图送入卷积神经网络(CNN,convolutional neural network)中训练,其中输入图像的像素为99×99,输出像素为1×1×2 的张量;训练好CNN 模型后,把预处理后像素为275×275 的锂电池电极图像送入模型,输出2 幅像素为12× 12 的分类置信度结果图,经阈值降噪处理后得到电池电极特征;最后把电池电极特征送入SVM 分类器完成迁移学习,并给出预测结果。
基于SVM 迁移学习算法提出的CNN 模型,与VGG19、MobileNetV2、InceptionResNetV2[15]和ResNet50模型相比,该模型在检测精度与检测速度方面略占优势,其中检测精度为99.04%。但将其用于锂电池检测仍存在以下缺点:①需要先进行CNN 网络特征提取,再送入SVM 分类器预测,流程较复杂;②该算法检测结果中存在缺陷极片被检测为正常极片的现象,这在现实生活中是有安全风险的。
1.2 MLP 特征向量分类算法
鉴于SVM 迁移学习算法流程较复杂、结果有安全风险的特点,提出了一种MLP(multi-layer perceptron)特征向量分类算法,该算法流程简单,识别结果没有安全风险。该算法主要针对18650 锂电池3 种内部结构图像进行分类识别处理,基于存在热失控爆炸风险的锂电池,其内部结构会发生相应变化,为了准确识别出3 种锂电池内部结构的种类,要逐步进行如图2所示的识别流程。首先进行特征向量和分类器的选择,选择出使得分类结果最优的特征向量和分类器组合后,对采集到的锂电池样本图像进行图像预处理,然后提取预处理后图像的特征向量,最后将特征向量送入分类器进行分类,得到锂电池样本图像的识别结果。

图2 锂电池样本图像分类识别流程图Fig.2 Flow chart of classification and recognition of lithium battery sample images
1.2.1 获取锂电池合适样本
导致锂电池发热失控的因素很多,总的来说分为4 种[16]:长期过充;未经授权改装外壳;环境温度超过60 ℃;生产缺陷、使用不当和挤压针刺等外部因素导致短路。
长期过充会导致电池老化,内部凝胶卷结构产生褶皱,容易造成内部短路进而发生热失控[3];改装外壳会导致安全装置缺失,在温度较高时电极材料发生分解,产生大量气体,外壳随之鼓包,没有安全阀打开过程,内部气体无法排出直接导致外壳爆炸[17];环境温度超过60 ℃时,内部温度上升、热量积聚,电极材料发生分解,产生大量气体冲开安全阀,气体排出锂电池时与外壳产生摩擦,同时空气进入锂电池内部参与反应,温度急剧升高导致产生不可逆的热失控[18];生产缺陷、使用不当和挤压针刺会造成锂电池结构内部短路,使用时会产生大量气体导致安全阀打开[19]。
综上可知,容易产生热失控并爆炸起火的锂电池的典型特征大体分为两种:一种为凝胶卷结构产生褶皱,另一种为电极材料产生分解、安全阀打开。可知存在3 种锂电池结构,分别为标准、凝胶卷产生褶皱和电极材料产生分解的锂电池结构,利用三维显微CT扫描仪得到18650 锂电池的横截面图像,3 种锂电池横截面的CT 图像如图3 所示。
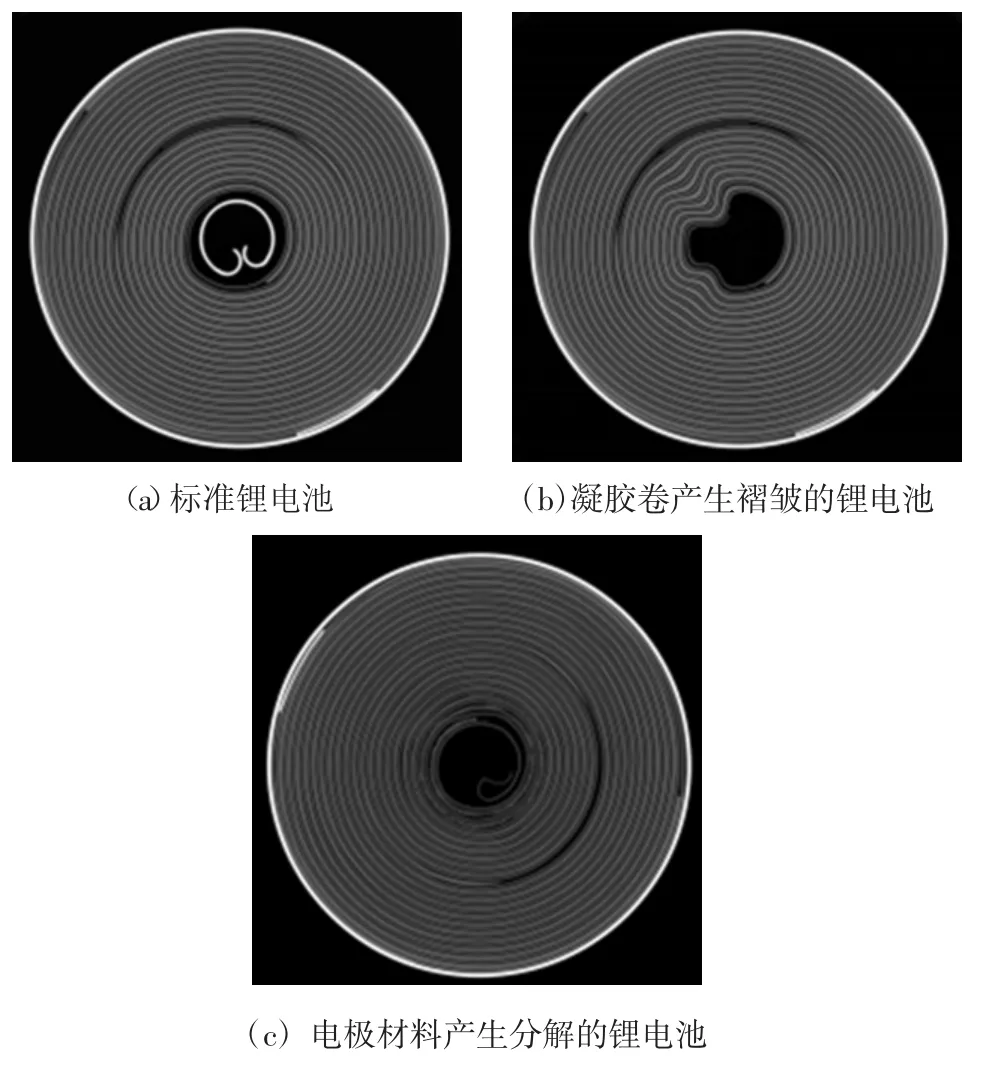
图3 3 种锂电池图像内部结构Fig.3 Internal structure of three kinds of lithium battery images
1.2.2 图像预处理
为了方便提取特征,需要对锂电池图像进行预处理,以标准锂电池图像为例进行图像的灰度化处理。原图像为3 通道的彩色图像,首先要把3 通道图像转换为1 通道的灰度图像,灰度图像的每个像素点灰度值Gray与R-Red、G-Green、B-Blue 分量图像的对应像素点的灰度值RG、GG、BG满足
其次需要对灰度图像进行频域滤波处理,以便平滑图像中的噪声。先用Direction 参数为to_freq、Exponent 参数为-1 和ResultType 参数为complex 的fft_generic 算子得到锂电池灰度图像的频域图像,转换公式如下
式中:F(m,n)为频域图像,m,n 为频域坐标;f(x,y)为空间域图像,x,y 为空间域坐标;M 和N 为原图像的大小;c 是用来缩放频域结果的常数,可设置为1 或M×N 或可设置为1 或-1;i 表示虚数单位;k和l 分别代表频率域中水平和垂直方向的频率分量。
接下来生成一个滤波器对频域图像进行滤波,使用gen_lowpass 算子生成一个截止频率为0.5 Hz 的低通滤波器,然后用convol_fft 算子让生成的低通滤波器对频域图像进行滤波,滤波公式如下
式中:F′(m,n)为滤波后的频域图像;G(m,n)为滤波器;F(m,n)为频域图像。
最后用Direction 参数为to_freq、Exponent 参数为1 和ResultType 参数为byte 的fft_generic 算子对滤波后的频域图像进行傅里叶反变换得到滤波后的空间域图像f′(x,y),滤波后图像如图4(a)所示。对灰度图像进行滤波后,接下来对图像进行增强对比度处理。使用掩膜宽高为5、对比度因子为2 的emphasize 算子进行处理,增强对比度处理后该图像的每个像素点像素值fres满足
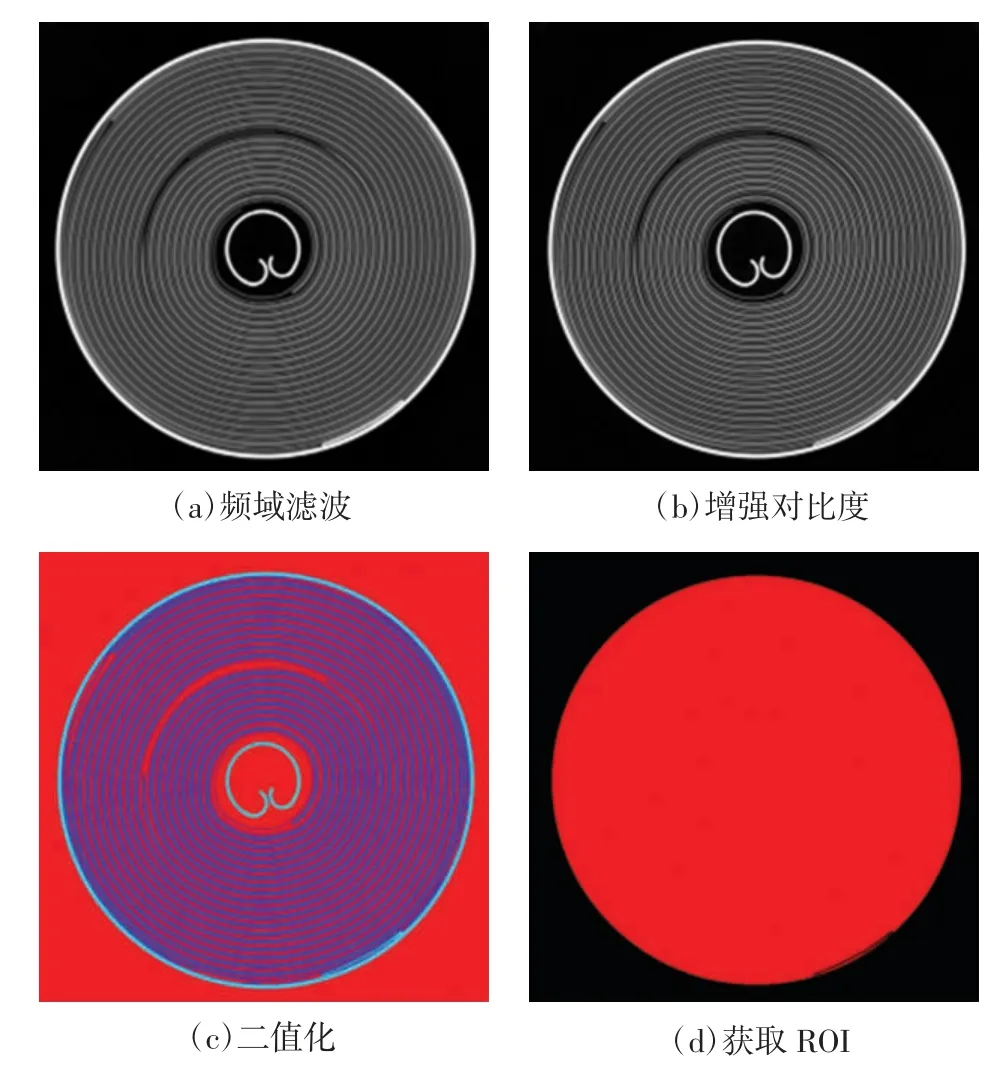
图4 获取感兴趣区域过程Fig.4 The process of obtaining ROI
式中:forig为处理前对应像素点像素值;fmean为掩膜内所有像素点的平均像素值;A 为对比度因子。增强对比度后的图像如图4(b)所示,锂电池内部的凝胶卷结构更加清晰。
接下来确定图像处理的感兴趣区域(ROI,region of interest),该图像的ROI 为锂电池图像中除去背景之外的锂电池所在区域。首先需要选用高斯平滑系数为25的auto_threshold 算子对图像进行二值化处理,得到的二值化区域如图4(c)所示。用connection 算子断开二值化处理得到的区域,接着以断开的区域作为起始区域进入一个循环:先用区域特征算子region_features计算每个断开区域的面积特征,再用选择区域算子select_shape 选择断开区域中面积最大的区域,然后用填充算子fill_up 对选择出的区域进行填充,用圆度特征算子circularity 获取填充后区域的圆度特征,最后用区域求差算子difference 求得进入此循环的起始区域与此循环中面积最大区域的差区域,求得的差区域随即作为下一个循环的起始区域,进入下一个循环继续进行处理,直到填充后区域的圆度特征大于0.9,跳出循环。跳出循环后,最后一个循环得到的填充后区域为ROI,如图4(d)所示。
18650 型锂电池内部结构发生变化时,首先会在凝胶卷结构内部产生,为了加快训练与识别的速度和准确率,需要缩小锂电池图像识别的区域范围。锂电池按照有无内部铜质支撑物分为两种,有铜质支撑物的锂电池图像会干扰到分类的准确性,而凝胶卷结构变化的特征需要被重点关注。为了使锂电池图像的分类更加准确,需要把包括铜质支撑物的中空区域灰度值绘制为0。图像裁剪与绘制流程图如图5 所示。
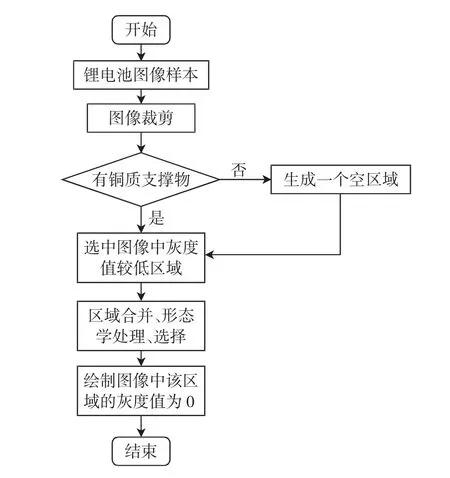
图5 图像裁剪与绘制流程图Fig.5 Flowchart of image cropping and painting
(1)首先获取ROI 的最小外接圆,输出最小外接圆中心点的行坐标Row 和列坐标Column,以及圆的半径Radius;然后用gen_circle 算子分别生成圆心坐标为Row 和Column,圆半径为Radius/2、Radius/3.5、Radius/5.5的3 个圆区域Circle、Circle1、Circle2;然后再用difference 算子获取Circle 和Circle1 的差区域Circle3;再使用min_max_gray 算子获取增强后的图像分别在Circle、Circle2、Circle3 区域内的最小灰度值Min、Min2、Min3,最大灰度值Max、Max2、Max3,灰度值范围Range、Range2、Range3;再用reduce_domain 算子把增强后的图像裁剪成Circle 区域的大小,即ROI 最小外接圆半径的一半;然后使用area_center 算子获取裁剪后图像的面积大小Area;最后使用crop_domain 算子把裁剪为原来一半的图像进行放大。裁剪后的图像如图6(a)所示。

图6 图像的裁剪与绘制Fig.6 Image cropping and painting
(2)判断裁剪后的图像内有无铜质支撑物。铜质支撑物是图像内灰度最高的部分,且与其他部分形成灰度值差。判断方法为查看ROI 的中间区域内是否有比ROI 的凝胶卷结构区域更亮的部分,首先用threshold 算子对裁剪后的图像进行二值化处理,算子的最小灰度值参数设为Max3,最大灰度值参数设为255,以便选中灰度值在Max3~255 之间的区域并命名为LightRegion。再用intersection 算子将LightRegion 与Circle2 求交集并判断交集区域的面积是否大于0.005×Area2(ROI 面积),若大于这个数值则是有铜质支撑物的情况,若小于等于这个数值则是没有铜质支撑物的情况,没有铜质支撑物的情况需要生成一个空区域LightRegion1覆盖原来的LightRegion。该步骤得到的LightRegion1区域为选中的铜质支撑物区域,如图6(b)所示。为了使得到的区域更加准确,需要用dilation_circle 算子对铜质支撑物区域进行膨胀处理,其中圆形结构元素的半径为0.03×Radius。
(3)选中图像中灰度值较低的区域,其中包括凝胶卷结构中灰度值较低的部分和中空区域的灰度值较低部分。首先用threshold 算子选中裁剪后图像中灰度值在0 和Max3-0.75×Range3 之间的区域;然后使用union2 算子将灰度较低区域与膨胀后的LightRegion1区域进行合并,合并后的区域命名为RegionUnion,即为凝胶卷结构中的灰度值较低部分和中空区域部分。
(4)用opening_circle 算子将RegionUnion 区域进行开运算处理,去掉凝胶卷结构中灰度值较低的部分,得到图像的中空区域部分,开运算后的区域命名为RegionOpening。再使用connection 算子对开运算后的区域做断开处理,然后用area_area 算子计算断开后区域的面积,再用select_shape 算子选择面积在0.05倍最大面积到最大面积之间的区域,然后使用fill_up算子对选择后的区域进行填充,再使用union1 算子将选中的区域合并为一个区域,合并后的区域如图6(c)所示。使用paint_region 算子将裁剪后图像的此区域绘制为0,最后使用crop_domain 算子剪裁图像的尺寸,绘制后得到的图像如图6(d)所示。
1.2.3 特征向量与分类器选择
根据图像预处理后3 种结构之间的不同特征,拟使用中间区域ConnectedRegions2 的圆度、凸度、圆形形状匹配的匹配分数、灰度共生矩阵特征、LBP(local binary patterns)图谱的灰度共生矩阵特征来进行分类。
(1)分别利用circularity、convexity 算子计算中空区域的圆度和凸度。
(2)利用gen_contour_region_xld 算子得到Circle1的圆形轮廓,再用create_scaled_shape_model_xld 算子创建Circle1 的可变圆形轮廓作为形状匹配的模板,然后用get_shape_model_contours 算子检查该形状模板的轮廓表示,再用find_shape_model 算子找到经过预处理后的图像最佳形状匹配位置,返回最佳匹配分数的参数Score 值。
如果Score 值不为空,利用仿射变换把该形状模板的轮廓移到最佳匹配位置,如图7 所示。由图7 可知,该最佳匹配位置有可能不在图像的正中心,所以需要得到新的Score 值作为特征变量。如果Score 为空,即没有找到最佳匹配位置,Score 值赋为0。
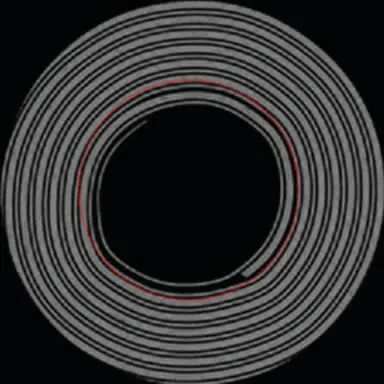
图7 最佳匹配位置Fig.7 The best matching position
(3)使用cooc_feature_image 算子计算经过预处理后的图像灰度共生矩阵纹理特征值,同时得到纹理特征值能量、相关性、同质性和对比度。
(4)获取经过预处理后图像的LBP 图谱,如图8所示。使用cooc_feature_image 算子计算LBP 图谱的灰度共生矩阵纹理特征值,同时得到纹理特征值能量、相关性、同质性和对比度。

图8 LBP 图谱Fig.8 LBP map
提取以上5 个特征的耗时,如表1 所示,其中提取LBP 图谱的灰度共生矩阵纹理特征值耗时1.19×106ms,时间较长,不满足机场货运安检所需的实时性,故该特征被舍去。
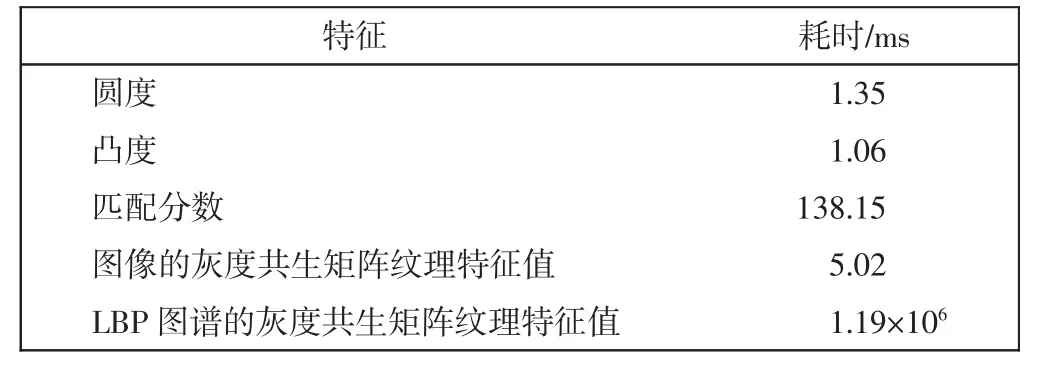
表1 锂电池图像特征提取耗费时长Tab.1 Time-consuming for feature extraction of lithium battery images
为了同时满足锂电池图像分类识别的实时性和准确性,每张锂电池图像提取[圆度]、[凸度]、[匹配分数]、[圆度 凸度]、[凸度 匹配分数]、[圆度 匹配分数]、[匹配分数 图像的灰度共生矩阵纹理特征值]、[圆度图像的灰度共生矩阵纹理特征值]、[凸度 图像的灰度共生矩阵纹理特征值]、[圆度 凸度 图像的灰度共生矩阵纹理特征值]、[凸度 匹配分数 图像的灰度共生矩阵纹理特征值]、[圆度 匹配分数 图像的灰度共生矩阵纹理特征值]12 个特征向量,再以锂电池的不同种类为参数分别送入SVM、MLP、GMM(Gaussian mixed model)、KNN(K-nearest neighbor)分类器中进行训练和分类,根据最后的分类结果找到最佳的特征向量与分类器组合。
2 实验结果分析
本文的研究重点在于正确地分类锂电池样本图像,并通过计算准确率、精确率的好坏来衡量分类器性能。假设标准的锂电池图像为正类,凝胶卷产生褶皱、电极材料产生分解的锂电池为负类。准确率表达式如下
式中:TP为正类判断为正类的个数;FP 为负类判断为正类的个数;FN 为正类判断为负类的个数;TN 为负类判断为负类的个数。
但是在锂电池货运和客运领域,不单单是要求准确率那么简单,在实际生活中标准锂电池被检测为有热失控风险的锂电池是可以被接受的,反之即为有爆炸风险,是不可接受的。基于此,本文需要计算另一种性能指标——精确率,计算公式如下
接下来给定一组新的锂电池测试图像,提取12种不同的特征向量分别送入SVM、MLP、GMM、KNN 4 种分类器进行分类。SVM 分类器选用的核函数为RBF(radial basis function),模式为一对一分类,预处理类型为正则化,输入特征数量为对应特征向量的维数,输出种类数量为3,通过不断调整核参数γ 和训练误差Nu 来观察不同特征向量送入SVM 分类器得到的分类结果,可知当核参数γ 和训练误差Nu 分别设为0.015 和0.05 时,分类结果为最佳;MLP 分类器选用的激活函数为softmax 函数,预处理类型为正则化,输入特征数量为对应特征向量的维数,输出种类数量为3,随机种子为42,通过不断调整隐藏单元数量值来观察不同特征向量送入MLP 分类器得到的分类结果,可知当隐藏单元数量值设为100 时,不同特征向量送入MLP 分类器得到的分类结果为最佳;GMM 分类器选用的变量类型为spherical,预处理类型为正则化,输入特征数量为对应特征向量的维数,输出种类数量为3,随机种子为42,通过不断调整中心数量值来观察不同特征向量送入GMM 分类器得到的分类结果,可知当中心数量值设为5 时,不同特征向量送入GMM 分类器得到的分类结果为最佳;KNN 分类器输入特征数量为对应特征向量的维数。12 种特征向量分别送入4 种分类器的最佳准确率和精确率结果如表2 和表3 所示,其中1~12 分别对应上文中不同特征排列组合形成的特征向量,特征向量2 为[凸度]特征向量。

表2 不同特征向量与分类器组合下的最佳准确率Tab.2 Best accuracy rate under different combinations of feature vector and classifier %
综上所述,[凸度] 特征向量送入隐藏单元数量值为100 的MLP 分类器中得到的准确率和精确率分别为79.687 5%和100%,是传统分类算法中的最佳测试结果,即在没有一个有热失控风险的锂电池样本识别为标准锂电池样本的情况下准确率达到最高,同时满足安全性、准确性和实时性,符合实际需要。接下来对每一个采集得到的锂电池图像进行图像预处理、特征向量提取、分类器分类的步骤,从而得到分类识别结果。
3 结语
锂电池检测是机场安检部门危险物品检测的一个重要任务。本文为锂电池的分类识别选择合适的特征向量和分类器,选择出的特征向量与分类器组合为[凸度]特征向量和隐藏单元数量值为100 的MLP 分类器,该组合对样本进行识别得到的准确率为79.687 5%,精确率为100%。本系统既在满足了实际工作中“宁可误报,也不漏报”准则的情况下准确率达到最高,又符合货运锂电池分类识别要求的实时性。但本实验只针对18650 型锂电池进行识别,下一步的研究将提出一个具有普适性的算法,可以同时识别不同种类的锂电池,并与人机交互界面联合投入到货运锂电池识别的实际应用中。
