基于STEAM理念的教育机器人物理创新实验研究
2024-01-17李雪芳
李雪芳

摘 要:提出基于STEAM理念的机器人技术与物理创新实验教育相结合的教学模式,以机甲大师S1机器人为载体,将普通的物理知识与信息科学、数学、工程等结合起来,创新采用探究式与项目式相融合的STEAM授课方式,培养学生的多学科思维和科学素养,激发学生学习的主动性,提高学生的创新能力。
关键词:STEAM;机器人;物理;创新实验
1 STEAM理念
STEAM代表科学(Science),技术(Technology),工程(Engineering),艺术(Arts),数学(Mathematics), STEAM教育是集科学、技术、工程、艺术、数学多学科融合的综合教育,旨在培养学生的科学探究精神和解决实际问题的能力[ 1 ]。
机器人教学融合了物理、数学、计算机、机械、电子、自动化等多个学科领域的知识,正好契合STEAM的教育精髓,将二者有机结合并巧妙融入到高中物理教学中,可以改变传统单一、枯燥的课堂教学模式,增加课堂的趣味性和综合性[ 2-3 ]。因此,基于STEAM理念的教育机器人物理创新实验不仅能够有效激发学生求知欲望,还能增强学生的创新探究能力和综合设计能力。
2 机器人中蕴含的物理知识
物理学,作为一门研究物质本质和规律的学科,与数学一起共同构成其他各自然科学学科的研究基础。机器人技术作为计算机学科的一个分支,是人工智能技术的产物,自然离不开物理学的支撑。经研究发现机器人内部蕴藏着大量的物理基础知识,比如保障机器人平稳运行的动力学及动力学模型是建立在物理经典力学的基础知识上,包括摩擦力、力的平衡、运动的合成与分解、牛顿运动定律、杠杆平衡条件等;机器人主控板部分则涉及到高中物理的电学常识(电阻、电容、串联、并联电路、欧姆定律等)和磁场知识(电磁感应、变压器、电动机等);机器人的智能化部分涉及传感器知识,常见的有温、湿度传感器、光敏傳感器、热敏传感器、红外传感器等;机器人的振动分析需用到物理的机械振动与机械波知识;机器人的驱动问题则与物理中的电磁感应原理及能量守恒定律密切相关[ 4-5 ]。
对一些抽象、不易理解的物理知识,如能借助机器人的介入则不仅能很好地激发学生的学习兴趣,启发学生积极思考,也有助于培养学生的探究精神和科学素养。对学有余力的学生,通过机器人辅助教学的启发,则能扩宽他们的视野,打破学科之间的壁垒,发展多学科思维。
3 基于STEAM理念的教育机器人实验教学设计
基于STEAM的创新校本课程设计,需要突出项目式、多学科、趣味性的特点,以生活的真实问题情境作为切入点,不断启发学生去思考、去讨论,循序渐进地开展项目活动[ 6 ]。一般以小组为单位,打破单一学科的思维定式和局限性,通过多学科的融合创新来完成项目任务,并在完成任务的过程中强化对知识的理解和运用。本课程设计创新采用探究式与项目式相融合的STEAM授课方式,即通过基础项目的探究逐层递进到高阶项目,逐一完成项目的过程中实现对物理、数学、信息等多学科的融会贯通。
3.1 情境引入
通过观看《侧方停车》视频,引发学生思考:生活中普通小汽车侧方停车存在一定难度,有没有一种车子可以实现平移?
引入大疆机甲大师RoboMaster S1机器人,通过现场遥控控制S1机器人平移到指定的侧方“车位”。
问题1:普通汽车无法做到的横向平移,而S1机器人却可以轻松做到,它的轮子与普通汽车轮子有何不一样?
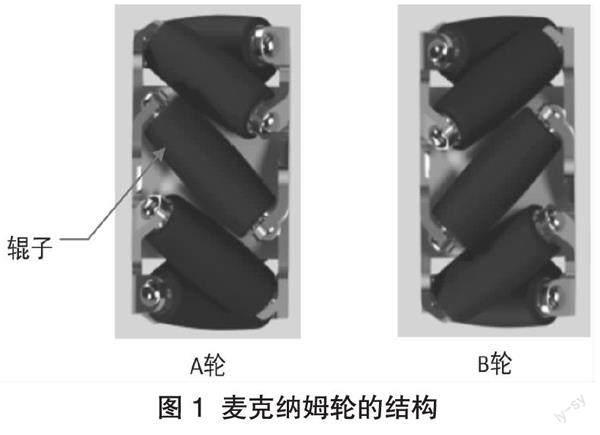
分析麦克纳姆轮结构和工作原理:S1底盘由4个带编码器的电机、控制电路和麦卡纳姆轮(以下简称麦轮)组成。每个麦轮是由轮毂和围绕轮毂的12个辊子组成的,辊子是一种没有动力的从动小滚轮,麦轮辊子轴线和轮毂轴线夹角是45°,分为互为镜像关系的A轮和B轮(或称左旋轮和右旋轮)两种,如图1所示。
根据“物体所受摩擦力与物体相对运动方向相反”的原理与“S1的麦轮辊子和轮毂呈45°夹角”的特点可以发现,S1机器人的麦轮转动时产生的力的方向与水平呈45°。
以S1车头为正方向,约定轮子前进时的方向为电机正转,轮子后退时的方向为电机反转。当A轮向前运动时会同时向右运动,即斜向右前方运动,那么相反,A轮向后运动的同时会向左运动,即斜向左后方运动;相应B轮就是斜向左前和右后方运动。
以上关于麦轮的结构特点和工作原理为后续的研究和探讨奠定了良好的基础。
3.2 分组探讨
问题2:以A轮、B轮可以构成几种底盘麦轮的组合方式?是不是所有组合都可以实现平移功能?请各小组讨论合理的组合方式以实现右移功能,并说明各轮的正反转情况。
学科融合:
这里需要用到数学排列组合的知识点以及物理中运动合成与分解的知识点。通过小组头脑风暴,大家激烈地讨论所有可能的组合方式:AAAA、BBBB、ABAA、AABA、AABB等。
在实际操作过程中,有的小组选择先分析再安装麦轮,有的小组则是边安装边尝试再调整。最终在反复实验和调整后,大家得出ABBA的“X”形结构,即A轮和B轮分别分布在对角线上。
如图2所示,分别对四个麦轮进行运动分解,当四个麦轮都正转的时候,AB轮可以相互抵消轴向速度,只剩下向前的速度,因此底盘就是向前直行,后退同理。
若要实现S1机器人向右平移平移功能,则需要所有竖直方向的分力相互抵消,水平分解的合力向右,以此来探讨每个轮子的转动情况应该是正转还是反转。
首先将麦轮受到地板的摩擦力F分解成水平方向和竖直方向的力,可以使用二维坐标系来标明方向,x代表水平方向,y代表竖直方向。那么每个轮子所受摩擦力F都可以分解为两个分力Fx和Fy。当对四个轮子都进行受力分解后,共会得到8个分力,分别叠加分析:
当机器人向右平移时,y轴方向上的两对分力大小相等、方向相反,相互抵消。而在x轴方向上,四个力的大小相等、方向相同,合力使机器人往右平移。反推可得:应该让A轮正转,B轮反转。
3.3 深度探究
问题3:如果想让S1机器人按照某一个特定角度作直线运动,应如何设置呢?
假设S1机器人运动速度为v,运动角度为θ。
① 建立坐标系并计算轮子的平移速度
建立坐标系,以机器人左右移动的方向为水平方向x轴,以机器人前后移动方向为竖直方向y轴,那么,整车的移动速度就是一个既有大小又有方向的矢量v。设速度v与x轴的夹角为θ,轮子的水平速度为vx,竖直速度为vy,则得:
② 計算辊子的速度
学科融合:融合信息学科的知识,在Scratch编程中使用麦轮的相关编程模块来实现S1机器人按照特定角度作直线运动,如图3所示。
当然,这个操作也可以使用底盘封装好的Block来完成,在APP中,只需通过Block设置底盘的实时状态、运动速率即可实现任意S1机器人任意朝向、任意角度的运动。
3.4 进阶项目挑战
问题4:如何让S1机器人沿不规则的蓝色轨迹作运动呢?
思路:引入光度传感器,分置于S1机器人的左右两侧,并与处理器连接。调整初始状态,让两个光度传感器分别位于蓝线的两侧,在机器人行进过程中,若右侧的光度传感器遇到蓝线,则光度值会随即下降,此时可以通过控制程序让右边的麦轮停止转动,左边的麦轮保持前进,从而使机器人往右微调,反之,当左边的光度传感器遇到蓝线,则可以让左边的麦轮停止转动,右边的麦轮保持前进,机器人左向偏移,以此控制机器人始终沿蓝线轨迹行驶。
学科融合:融合信息、工程、技术等知识,要求各小组凝练思路,编写Scratch程序并加以展示机器人的巡线行驶效果。
在实际设计过程中,好几个小组都会出现S1机器人“不听话”的情况,比如机器人不按轨迹行驶、机器人左右摇摆幅度大等,这时教师应遵循STEAM的理念引导学生分析问题与解决问题的能力,可上网查阅资料,可互相探讨,也可以向其他小组寻求帮助,必要时可画龙点睛地启发或点拨。总之,要让学生“在做中学”,在边做边学中实现知识的迁移和巩固,以培养学生不怕困难、勇于面对困难的科学态度和科学精神。
3.5 成果展示与评价
各小组分组汇报成果,通过Scratch程序的编写与运行,测试S1机器人巡线运行的情况,汇报重点包括设计流程,团队合作,设计或测试过程中碰到的问题以及解决问题的方法,自我评价等,然后教师及其他小组也对其进行评价,同时提出需要改进的地方。需要注意的是,由于STEAM采用的是项目式教学的方法,核心是为了培养学生的创新意识和科学素养,因此在评价的过程中应坚持过程性评价与结果性评价相结合的原则,可重点评价学生在学习过程中的自主探究、应对困难的勇气和团队合作精神等。
总之,STEAM项目式教学围绕某一个生活情境或具体问题,将机器人技术与物理创新实验教育有机融合,对于活跃课堂气氛,激发学生的好奇心、求知欲等确实起到很好的作用。但对物理教师的挑战在于,备课期间需要自主学习计算机程序设计等相关知识,并将它们润物细无声地融入到物理实验教学中,打破学科壁垒,启发学生利用所学的物理知识开展自主创新活动。
参考资料:
[1] 王学男.STEM教育创新与实践:中小学机器人课程建设的研究[J].教育科学研究,2022(11):91-95.
[2] 杨俊亚.基于STEAM教育理念的高中物理活动课程的设计:以教育机器人打印力的合成演示仪为例[J].中学物理,2020(38):31-33.
[3] 顾青.将学科知识融入机器人教育:以融合中学物理知识构建垃圾分拣机器人为例[J].中学物理,2020(2):70-71.
[4] 汪小庆,周明龙.基于机器人课程基地平台的STEM 教育实施策略[J].中国教育信息化,2020(18):40-44.
[5] 陈曙光,张思进.机器人基础物理课程内容体系构建与实践教学[J].计算机教育,2021(11):58-61.
[6] 王勇.基于STEAM教育理念的科技创新校本课程开发以机器人创客教育校本课程为例[J].实验教学与仪器,2022(10):71-73.
2020年度福州市教育信息技术研究课题:基于机器人的物理创新实验实践研究(FZDJ2020A04)研究成果