一种大视场经纬仪分区误差修正方法及分析*
2024-01-16迟明祎陈爽爽刘泽庆
迟明祎,张 琦,陈爽爽,刘泽庆,高 航
(解放军63861 部队,吉林 白城 137001)
0 引言
光电经纬仪是重要的靶场测量设备,主要用于导弹外弹道测试和航天测控任务[1-3],具有高精度、宽视场和多目标跟踪识别等优势[4]。经纬仪光学系统的结构特性决定了经纬仪视场中偏离主点位置的像素成像存在不同程度的径向畸变、偏心畸变、焦平面变形等误差,尤其是短焦距大视场的红外成像系统[5-6],而经纬仪的全视场测角精度是影响数据录取质量的重要技术指标,对经纬仪全视场点进行误差修正,是经纬仪在操保过程中最重要的内容之一。实践中通常采用分区域处理方法:把经纬仪视场分割成多个区域,在每个区域内采集若干个点,以被测目标真值为基准进行最小二乘拟合,得到所在区域的测角修正系数组,从而对全视场测角进行误差修正。
传统的经纬仪误差修正方法,以实验室条件下的平行光管(野外条件下拍方位标或星体)的全站仪测量真值作为基准,通过经纬仪编码器示值和相面坐标值解算得到的指向角,对指向角与平行光管真值的差值进行最小二乘拟合计算,得到像面修正系数组,实现对大视场光学经纬仪或拼接弹道相机的分区误差修正。
在长期的工程实践中对比发现,以对准目标时的经纬仪指向值代替平行光管真值作为基准,进行分区最小二乘拟合得到的修正模型,能够提高经纬仪的测角精度。本文分别采用传统的依托真值和本文提出的依托指向值的修正方法建立两套修正模型,对同一目标进行测量,进行误差对比分析,验证了结论的有效性,最后对造成这一现象的成因进行了分析,为提升光电经纬仪测量精度提供借鉴和参考。
1 经纬仪轴系单项误差
假设经纬仪的机械结构是理想的几何结构,那么偏离视场主点位置的像素在成像时并不存在误差,但由于加工、装调等因素影响,理想机械机构在现实中并不存在[7-9],所以需要对经纬仪实际光机结构偏离理想结构的角量进行解算,通常影响视轴定向的单项差主要有4 个:视轴差、零位差、横轴差和定向差。单项差的概念、对定向误差的影响及检测方法如表1 所示。
综上所述,4 个单项差对经纬仪方位和俯仰的测角的影响如图1 所示。

图1 单项差对经纬仪指向的影响Fig. 1 The impact of single difference on the pointing direction of theodolite
经纬仪的实际角度值和经纬仪编码器值的关系如下:
其中,A0,E0为经纬仪方位角和俯仰角的实际值,Azx,Ezx为表示经纬仪的指向值即编码器示数。
通常情况下,为了提升测量精度,在使用经纬仪开展测量事前或者事后进行拍标对上述单项差进行当次解算,事后利用单项差对数据处理过程进行修正。除上述单项差以外,经纬仪的畸变、焦平面变形等因素对测量的影响无法通过拍标进行解算,则需要通过分区误差修正方法进行校正。
由文献[4]可知,已知目标在视场中的像面坐标、经纬仪方位俯仰角度,目标的方位角、俯仰角的计算模型为:
式中,α为经纬仪测角的方位角;β为经纬仪测角的高低角;x为水平方向的像面坐标;y为垂直方向的像面坐标;f为经纬仪主距;A为经纬仪视轴的方位角;E为经纬仪视轴的高低角。
2 基于指向值的分区误差修正方法
2.1 基本思想和算法步骤
分区误差修正处理方法的基本思想是[5-6,14]:当经纬仪测量同一目标时,无论目标成像在像面的任何位置,理论上经纬仪解算出的角度应该是一致的,但在实际测量中,测量的像面坐标与理论像面坐标存在偏差,分区误差修正实际上就是在像面点层面对经纬仪测角偏差进行修正。
基于指向值的分区误差修正基本算法步骤是:1)将靶面分割为M×N个小区域;2)经纬仪按照预设的路径进行移动,使样点在每个小区域内的不同位置停留,采集足够多的样点;3)根据目标的角度基准值计算目标在像面上的理论坐标,通过控制软件读出目标在像面上的实际坐标;4)采取最小二乘法计算每一个区域内经纬仪对点目标的成像位置的偏差修正系数组[15-18];5)建立分区误差修正模型。
算法流程如图2 所示。
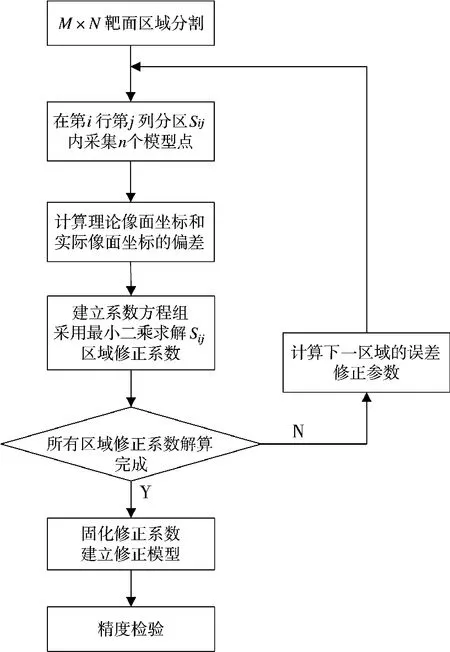
图2 分区误差修正方法流程图Fig. 2 Flow chart of partition error correction method
2.2 建立最小二乘方程
设小区域内采集的目标点,目标的实际像面坐标为(x、y),经误差修正模型修正后的像面坐标是为(x'、y'),采用线性修正,根据线性修正方法原则有:
假设在第i行第j列小区域Sij内对同一点目标(平行光管)进行n次采集,则有:
设区域内采集点的像面坐标理论值为(XLi,YLi),则依据最小二乘法则,k1、k2、k3应当满足Q=,根据多元函数极值原理,将式(16)对k1,k2,k3取偏导数并令其为零,即:
式(18)为水平方向的系数方程组,同理,竖直方向的系数方程组为:
求解以上两个方程组,即可求出该区域的6 个修正系数,同理,全视场其他小区域按照上述方法求出该区域的6 个修正系数。
2.3 基准角度值的获取方法
由杨增学的文献[4]可知,已知点目标相对经纬仪成像中心的空间理论角度值(Al,El)和经纬仪对空方位俯仰角(A0,E0),如图3 所示,点目标在视场中的像面坐标的理论值为:
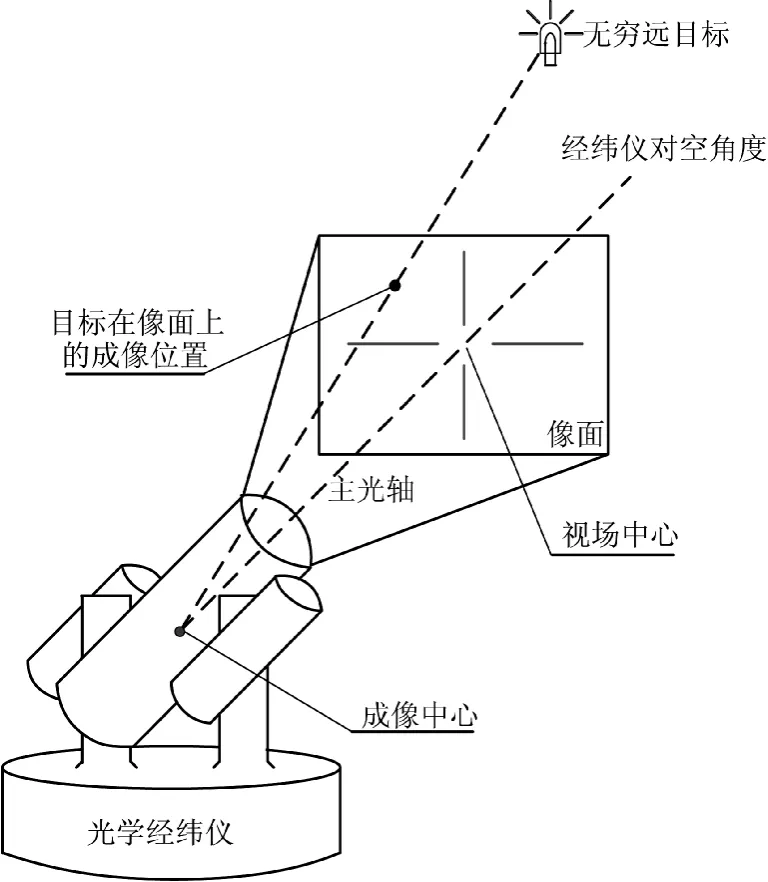
图3 亮点目标视场成像示意图Fig. 3 Schematic diagram of field of view imaging of highlight targets
其中,xl、yl为表示点目标在该小区域像面坐标值的理论值;Al、El为表示点目标相对于经纬仪成像中心的方位角和俯仰角的理论值;A0、E0为表示经纬仪的实际的对空方位和俯仰角度;f为经纬仪主距。
式(20)揭示了当目标点在经纬仪视场的任意位置成像,已知点目标的理论方位俯仰角和经纬仪的指向角的情况下,如何求解得到每个点目标在视场中的理论像面坐标值。
在长期的工程实践过程中,对于基准值(Al,El)的选取测试了两种不同的选择:
一是以平行光管的相对真值(AT,ET)为基准计算点目标的理论像面坐标,即利用全站仪测量平行光管的角度值,也是大量分区误差修正方法的文献资料所采用的一般传统办法。
二是以经纬仪的指向值(Az0,Ez0)代替平行光管的相对真值作为基准,也就是对准点目标时经纬仪方位俯仰编码器的示值。
经对比发现,采用后者构建的修正模型能够得到更优的测角精度,结论在后文验证。
获取基准角度值的操作方法如下:
1)通过拍方位标解算经纬仪各单项差,对光学系统进行单项差修正;
2)通过单杆操控经纬仪指向平行光管,使目标在视场中心位置附近成像;
3)调节焦变量使目标成像清晰;
4)对目标进行单次采集,计算x方向和y方向上目标成像位置距中心位置的距离(单位:像素);
5)向伺服系统发送引导坐标,将目标逐渐引向成像中心;
6)循环4)~5),直至在像面上成像位置距离中心点误差在2 个像素内,此时的像面脱靶量ΔA、ΔE约等于零;
7)记录经纬仪编码器值(Az0,Ez0),此时的经纬仪编码器值即经纬仪完全对准平行光管时的经纬仪指向值,其空间原理和位置如下页图4 所示。

图4 经纬仪对准平行光管Fig. 4 Theodolite aligns with the collimator
以此时编码器值即相面脱靶量为零时的经纬仪指向值(Az0,Ez0)代替平行光管真值作为计算理论像面坐标的基准,即令:
而后按照2.1 所述基于指向值的分区误差修正算法步骤,将式(21)代入式(20)中,解算得到点目标的理论像面坐标值xl、yl,将理论像面坐标值xl、yl和样点实测像面坐标值x、y带入式(16)方程中,通过求解方程组式(18)、式(19),得到为该小区域的修正系数。同理,最终得到全视场M×N个区域的修正系数组。
传统的平行光管真值为基准的方法如下:以平行光管的相对真值(AT,ET)作为计算理论像面坐标的基准,即令:
而后代入式(20)中,解算得到点目标的理论像面坐标值xl、yl,将理论像面坐标值xl、yl和样点实测像面坐标值x、y带入式(16),通过求解方程组式(18)、式(19),得到该区域的修正系数。
3 误差分析
3.1 实验验证
为了验证依托指向值的分区误差修正对经纬仪测角精度的提升,分别以依托真值和依托指向值构建各自的修正模型,开展精度对比实验,以视场角约为2°的某型红外经纬仪分站4 台作为研究对象。
首先,将全视场按照4×4 进行分区,以0°俯仰角的平行光管为基准,分别按照依托真值和依托指向值的方法,求解修正系数组,分别写入2 套目标提取程序中,除6 个参数外,确保其他变量相同。
然后,对另一个平行光管进行多次动态测量,分别按照以上两套修正方案求解指向角测量值。
最后,将两套修正方案计算得到的指向角与全站仪测得的平行光管相对真值作比对,获得方位和俯仰方向上测角精度结果如表2 所示。

表2 测角精度比对(单位/s)Table 2 Precision comparison of angle measurement(unit/second)
图5 和图6 所示为方位方向、俯仰方向两种方法的测角精度比对结果:

图5 方位测角精度比对Fig. 5 Precision comparison of azimuth measurement

图6 俯仰测角精度比对Fig. 6 Precision comparison of pitch measurement
图中方法1 为依托真值方法,方法2 为本文依托指向值方法。从数据比对的结果来看,在俯仰方向的测角精度比对中,方法2 优于方法1,且方法1 的误差为方法2 的误差近两倍大小,但在方位方向的测角精度比对中,两种方法的测角误差基本一致。
3.2 成因分析
对上述对比结果出现的原因进行分析。在理想情况下,经纬仪不存在影响视轴定向的单项差,有式(23)成立:
即两种方法测得的修正系数应该是一致的,测角精度结果也应该是一致的。但在实际测量中,由于存在零位差、照准差、定向差、横轴差等误差影响,修正系数不一致,从而导致测量精度不一致。在3.1 对比实验中,使用俯仰角0°的光管作为修正基准放在视场中心位置,那么在方位方向上有:
由式(3)、式(12)有:
由式(13)且目标位于视场中心,则有:
由式(26)可知,方位方向指向值与目标真值近似相等,那么方位方向上的修正系数基本一致,因而两种方法的方位测角精度结果基本一致,所以图5 中两种方法的测角精度几乎相同。
可知,ET与EZ0并不相近,即采用两种方法,目标在视场中成像时的像面坐标理论值不相等,从而导致两种方法俯仰方向上的修正系数有明显差异,从而俯仰测角精度表现较大差异,所以在图6 中俯仰方向的测角精度出现较大差异。
3.3 方法对比及分析
由式(27):
可知,经纬仪的实际指向角和经纬仪的编码器示值之间存在单项误差的影响。基于平行光管真值为基准的分区修正方法,融入了轴系单项差的影响,也就是说对每个小区域的修正,既修正了畸变、像面变形等误差,同时也修正了视轴差、零位差、横轴差和定向差等。然而每一次开机经纬仪单项差并非恒定值,经纬仪在运输、吊装过程中受震动、复杂应力以及基座(固定基座和临时搭建点位)的影响,单项差频繁发生变化,表3 所示为某型红外经纬仪随机挑选近10 次使用时单次单项差解算的结果:

表3 某型经纬仪单项差(单位:s)Table 3 Single difference of a certain type of theodolite
从表3 可以看出,每一次经纬仪单项差采集结果呈现明显的差异性。进而以平行光管真值为基准值构建的分区误差修正模型实际上包含了标校当天的单项误差,而在后续的使用过程中,单项误差发生了变化,并没有改变已经固化在模型中单项差对分区误差矫正的影响,因此,采取依托真值的修正方法忽视了每次事前拍标的三差的差异性,尤其是在经纬仪使用时间达到一定年限时,单次拍标的三差结果呈现更为明显的差异性,且量值区间也发生了较大变化,将会对经纬仪的测角精度造成明显影响。
相比之下,标校之前先解算经纬仪单项误差,以经纬仪对准平行光管ΔA≈0,ΔE≈0 时的经纬仪编码器值(Az0,Ez0)作为计算理论像面坐标的基准,此时得到的修正模型消除了标校当天单项差对经纬仪的影响,对单项差以外的全视场误差进行校正,并固化在修正模型中。之后在经纬仪的测量使用中,单项差带来的影响通过事前或者事后的拍标来叠加消除,单项差以外的影响通过误差修正模型进行消除,充分考虑了单次单项差的差异性。
综上,两种修正模型均能够达到改进经纬仪测角精度要求,但是,相比于以平行光管真值为基准,基于经纬仪指向值的分区误差修正方法会带来更高的测角精度。
4 结论
针对大视场经纬仪全视场像面坐标修正问题,在传统的全视场分区域最小二乘拟合误差修正方法的基础上,针对基准值的选取问题,区别于传统方法中的依托真值,本文提出依托经纬仪完全对准目标点时的指向值作为基准值的分区误差修正方法,并总结了基于指向值的分区误差修正方法步骤。分别依托真值和指向值为基准构建了两种修正模型,通过对比实验比较两种修正方法的经纬仪测角精度,实验得出,依托指向值的分区误差修正方法能够获得更好的测角精度。最后对两种方法进行了比较,并对造成上述规律的成因进行了分析,为提升光电经纬仪测角精度提供了参考和借鉴。
