基于虚拟阻抗特性扰动的光伏全局最大功率跟踪控制方法*
2024-01-15张凤军高长伟黄翀阳郑伟强
张凤军 高长伟 黄翀阳 郑伟强 王 伟
(1.辽宁科技学院电气与自动化工程学院 本溪 117004;2.沈阳工业大学电气工程学院 沈阳 110870;3.营口供电公司 营口 115002)
1 引言
太阳能是绿色可再生能源,光伏发电作为太阳能开发利用的典型方式受到了世界各国研究人员的普遍关注。然而,在现有技术条件下光伏电池的光电转换效率不高,并且输出呈现非线性[1-3],为有效提高光伏阵列发电效率,需要采用最大功率点跟踪(Maximum power point tracking,MPPT)控制技术使其工作在最大功率点处。实现全局最大功率跟踪(Global maximum power point tracking,GMPPT)是提高光伏发电系统工作效率的基本措施[4-6]。理想环境条件下,光伏阵列功率-电压(P-U)特性曲线呈现单峰值特征,采用传统的MPPT 控制方法(如扰动观察法、电导增量法等)即可实现最大功率跟踪控制。但在实际工作过程中,光伏电池会因为光照不均匀、积尘覆盖、老化等原因,使得光伏阵列的电流-电压(I-U)特性曲线呈现阶梯状,同时其功率-电压(P-U)特性曲线具有多个峰值[7]。在多峰值情况下,传统最大功率跟踪控制方法无法准确搜索到全局最大功率点(Global maximum power point,GMPP),易收敛于局部最大功率点(Local maximum power point,LMPP),从而导致跟踪失败,使得光伏阵列工作效率降低,输出功率显著减小[8]。
为了有效提高光伏发电系统光电转换效率,国内外学者对多峰值MPPT 控制方法进行了深入研究,产生了诸多有益研究成果。文献[9]提出利用神经网络控制技术实现全局最大功率点跟踪,该算法具有良好的非线性拟合能力,能够实现较好的多峰最大功率点跟踪效果,但是采集神经网络所需的可靠训练数据是一个关键问题,算法依赖于大量的光伏阵列数据信息。文献[10]提出了基于Fibonacci 搜素的全局最大功率点跟踪控制方法,该方法跟踪精度高、动态性能好,但跟踪速度较慢,同时,其对于光伏阵列结构以及峰值点分布规律等信息依赖较为严重。文献[11]提出了一种改进电导增量法的多峰值MPPT 算法,具有较快的扫描速度,但在单峰值条件下效率较低、算法重启频繁。文献[12-13]对基于等功率线扫描的全局最大功率点跟踪控制方法进行了研究,该类算法可以有效避免陷入局部极值的问题,但其具体控制性能往往易受峰值点分布情况影响。文献[14-17]研究了基于粒子群(Particle swarm optimization,PSO)算法的MPPT 方法,该方法的突出优点是不存在稳态功率振荡问题,稳态跟踪精度高,但存在收敛时间较长、容易收敛于局部功率峰值点等问题。文献[18-19]对基于细菌觅食算法的全局最大功率点跟踪控制方法进行了研究,该类算法具有较高的求解精度与较好的动态性能,但算法实现过程较复杂且在静态环境条件下跟踪速度较慢。
综上所述,现有全局MPPT 控制方法实现过程普遍较为复杂,控制性能易受环境因素影响,具有一定的局限性。本文提出一种基于虚拟阻抗特性扰动(Virtual impedance characteristic disturbance,VICD)的光伏全局最大功率跟踪控制方法,将全局搜索机制引入到传统的扰动观察法中,以提高算法的适用性。该方法首先通过虚拟阻抗特性来对光伏阵列I-U特性曲线上最大功率点所处的位置区域进行初步定位,然后利用传统的扰动观察法进行准确跟踪。该算法在其具体实施过程中只需要对光伏阵列的输出电压和电流进行实时测量,无需附加其他测量电路,流程简单易实现。
2 局部阴影下光伏阵列非线性特征
光伏阵列通常由一系列的光伏电池组件串并联组成,以维持预期的输出电压与电流,当光伏阵列表面光照强度一致时,其输出的P-U特性曲线呈现单峰值特征。光伏电池输出特性方程为
式中,Iph为光生电流;Is为饱和电流;A为与PN 结材料特性相关的参数;q为电子电荷量;K为波尔兹曼常数;T为绝对温度;Rs为串联等效电阻;Rsh为并联电阻;I、U为光伏电池输出电流和端电压。
对于由n行m列的光伏电池构成的光伏组件(行数n为某条支路中所串联光伏电池的数量,列数m为光伏组件所包含并联支路的个数),其输出特性可表示为
式中,Uz、Iz、Uocz、Iscz分别为光伏组件的输出电压、输出电流、开路电压、短路电流;Uoc、Isc为光伏电池的开路电压与短路电流。将光伏阵列中光伏组件输出特性叠加可得光伏阵列整体输出特性,如图1 所示。
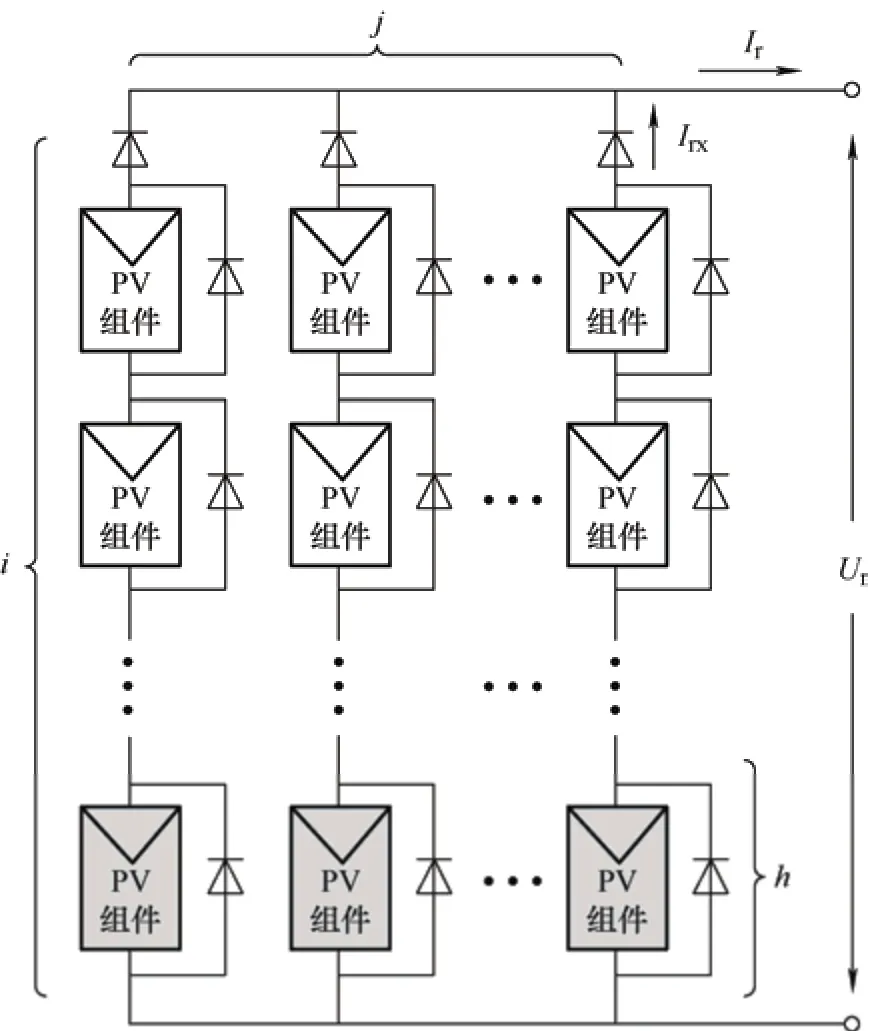
图1 用于分析局部阴影效应的光伏阵列模型
对于一个包含i行j列光伏组件的光伏阵列,当光照均匀时,其输出特性为
式中,Ur、Ir、Uocr、Iscr分别为光伏阵列的输出电压、输出电流、开路电压、短路电流;Rsr为光伏阵列串联等效电阻;Rsz为光伏组件串联等效电阻。
均匀光照条件下光伏阵列输出电流可表示为
若图1 中每列有h个光伏组件被遮挡,当旁路二极管导通压降为零时,光伏阵列输出电流为
3 基于VICD 的光伏GMPPT 控制法
当有局部阴影产生时,首先利用光伏阵列的虚拟阻抗特性对其I-U特性曲线上最大功率点所处的位置区域进行初步定位,然后利用传统的扰动观察法对局部遮荫条件下光伏阵列的全局最大功率点进行精确搜索。当光伏阵列中的某块光伏电池被遮挡时,由于其所受光照强度下降,致使输出电流减小;同时,由于遮挡使得光伏电池阻抗增大、温度升高,又会导致输出电压有所减小[20]。基于上述结论,本文所提算法利用式(6)、(7)对光伏阵列的光照情况进行判断,当两条件成立时,说明光伏阵列表面产生局部阴影。
式中,ΔUset、ΔIset为设定的光伏阵列电压、电流波动阈值,该值由用户或厂家根据实际环境条件进行设定。
当式(6)、(7)成立时,可根据式(8)基于光伏阵列虚拟阻抗特性对其最大功率点所处的位置区域进行初步定位,确定新的光伏阵列工作点参考电压,在此基础之上再利用扰动观察法进行准确跟踪。
式中,Uref为光伏阵列工作点参考电压;Ipv(k)为当前输出电流;Zr为光伏阵列虚拟阻抗线。
根据图1所示的光伏阵列,当局部阴影使其P-U特性曲线具有三峰值特征时,全局最大功率点的位置分布可分为三种情况,如图2 所示。图2 中,曲线1、2、3 分别为全局最大功率点坐落在较高工作电压区域、中等工作电压区域和较低工作电压区域的情况。下面结合图3、图4 以及图5 分别对上述三种情况下所提算法的工作原理进行说明,A点为光照均匀时光伏阵列的最大功率点,B点表示局部阴影产生瞬间光伏阵列的瞬时输出功率,C点表示根据式(8)初步定位的光伏阵列输出功率,D点为局部阴影产生后光伏阵列的全局最大功率点。
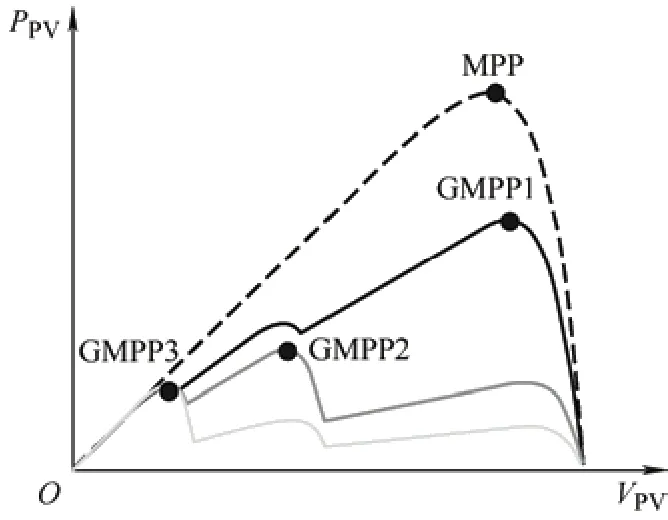
图2 全局最大功率点分布规律
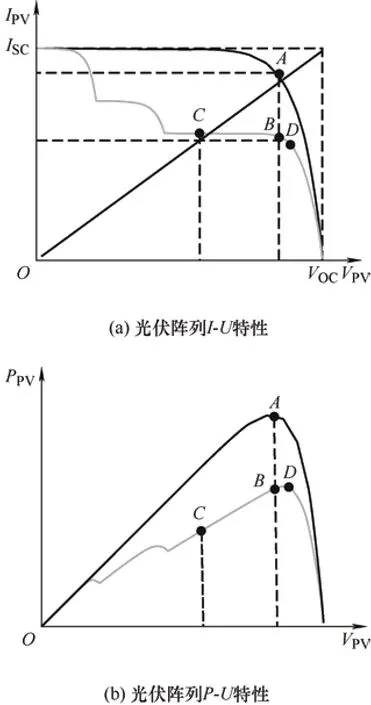
图3 全局最大功率点具有较高的电压水平
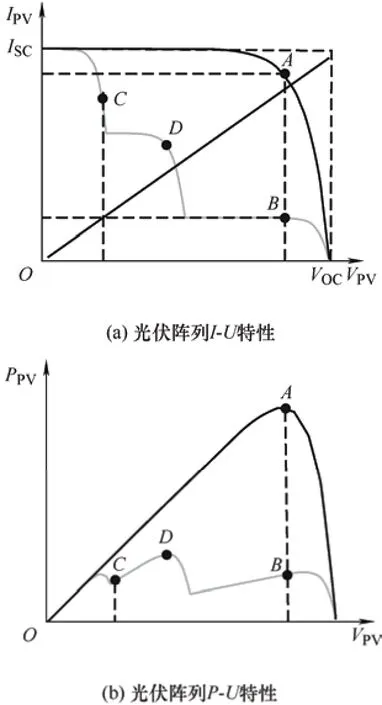
图4 全局最大功率点具有中等电压水平
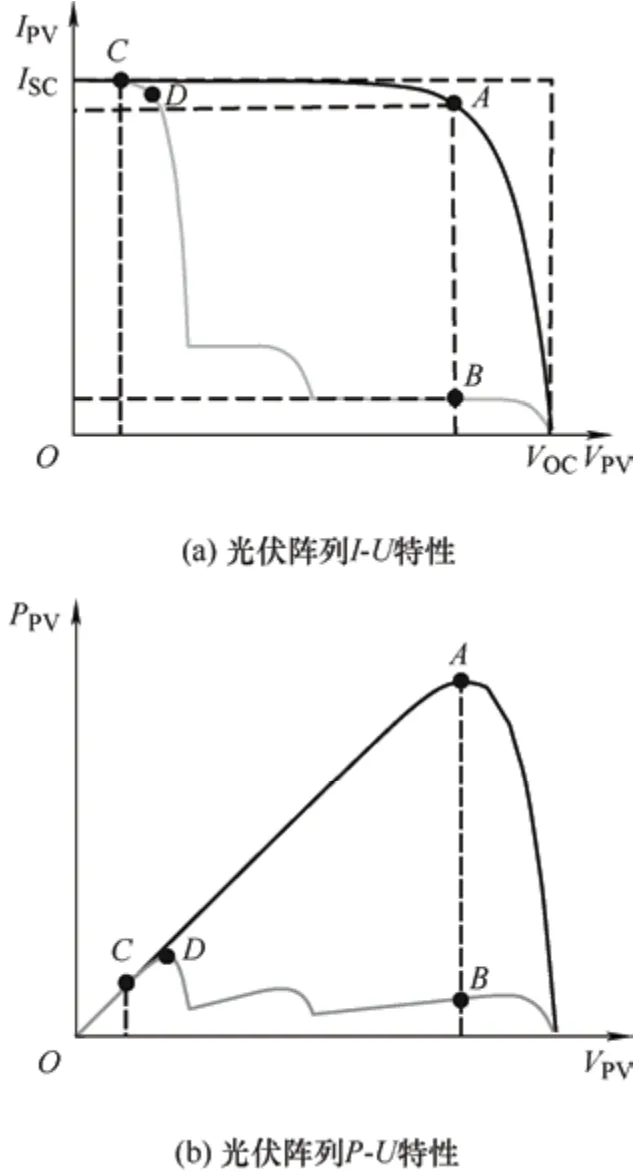
图5 全局最大功率点具有较低的电压水平
如图3 所示,在全局最大功率点坐落于光伏阵列输出电压较高区域的情况下,当光照均匀时,光伏阵列工作点位于A点,当有局部阴影产生后,其工作点迅速移动到B点。本文所提算法经式(6)、(7)判断得知有局部阴影产生,然后利用式(8)对光伏阵列最大功率点所处的位置区域进行初步定位,令Ipv(k)=IB,得UC=Uref=Zr×IB,从而可根据新的参考电压UC将工作点从B点移至C点,最后再利用扰动观察法对全局最大功率点进行准确跟踪,使工作点最终稳定在全局最大功率点D点附近。此种情况对所提控制方法最为不利,因为全局最大功率点D坐落在初始功率点B附近,而算法根据式(8)对光伏阵列最大功率点所处的位置区域进行初步定位得到的工作点C距离全局最大功率点相对较远。
图4、图5 两种情况下的工作原理与前述过程相同,此处不再赘述。其中,图5 所示为全局最大功率点坐落在光伏阵列输出电压较低区域的情况,此时对于运用所提控制方法最为有利,因为根据式(8)对光伏阵列最大功率点所处的位置区域进行初步定位所确定的C点直接坐落在全局最大功率点D附近。
由上述理论分析可见,当外部环境条件变化使得光伏阵列表面光照不均匀时,采用本文所提MPPT 控制法只需要对光伏阵列的输出电压与电流进行测量,无须附加任何其他测量电路,即可实现光伏阵列的全局最大功率跟踪,有利于提高光伏发电系统在不均匀光照条件下的工作效率。算法具体实现流程如图6 所示。

图6 所提光伏系统MPPT 方法控制流程
4 仿真分析
为了验证所提光伏MPPT 控制策略的可行性,基于Matlab/Simulink 平台,搭建如图7 所示拓扑结构的光伏MPPT 控制系统模型。
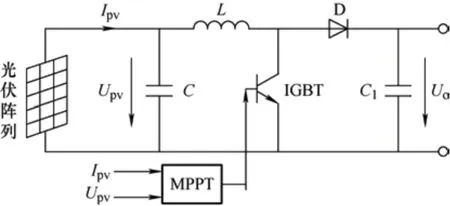
图7 光伏系统MPPT 模型
图7 中以M×N光伏阵列为光伏源端(M为光伏电池组件串联个数,N为光伏电池组件并联个数)为例,光伏阵列的具体参数设置如表1 所示。

表1 光伏阵列参数
仿真模型中光伏阵列特性曲线,如图8 所示,包括均匀光照条件(S=1,1,1,1,1 kW/m2)和局部阴影条件(S=1,1,1,0.3,0.2 kW/m2)两种情况。

图8 光伏阵列的输出特性
由图8 可见,均匀光照条件下,光伏阵列最大功率点电压为186 V,对应的最大输出功率约为3 300 W。局部阴影条件下,光伏阵列有一个全局最大功率点和两个局部最大功率点,全局最大功率点电压约为110 V,与之对应的全局最大输出功率约为1 750 W。分别采用本文所提出的基于虚拟阻抗特性扰动全局最大功率点跟踪控制方法与扰动观察法对光伏阵列进行MPPT 控制,对控制结果进行比较。
4.1 扰动观察法控制结果
起始时为均匀光照条件(S=1,1,1,1,1 kW/m2),t=0.2 s 时产生局部阴影(S=1,1,1,0.3,0.2 kW/m2),通过扰动观察法对光伏阵列进行MPPT 控制。图9 为最大功率跟踪控制过程中光伏阵列输出的I-V、P-V特性曲线的变化轨迹,与图8 对比可见,采用扰动观察法时,光伏阵列输出功率最终收敛于局部最大功率点,最大功率跟踪失败。
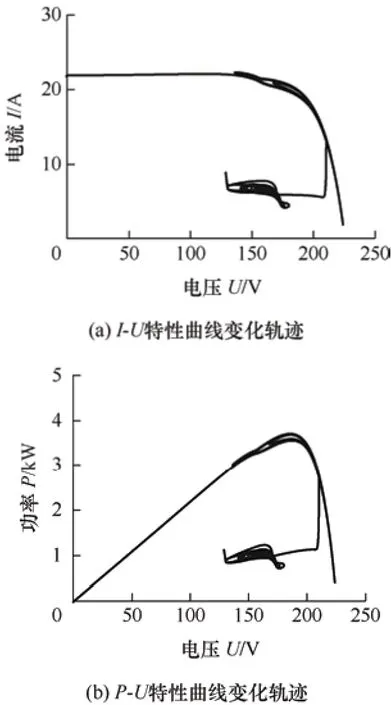
图9 光伏阵列的输出特性曲线变化轨迹
4.2 虚拟阻抗特性扰法控制结果
采用所提出的基于虚拟阻抗特性扰动全局最大功率点跟踪控制方法对光伏阵列输出进行MPPT 控制,图10 为最大功率跟踪控制过程中光伏阵列输出的I-V、P-V特性曲线的变化轨迹。
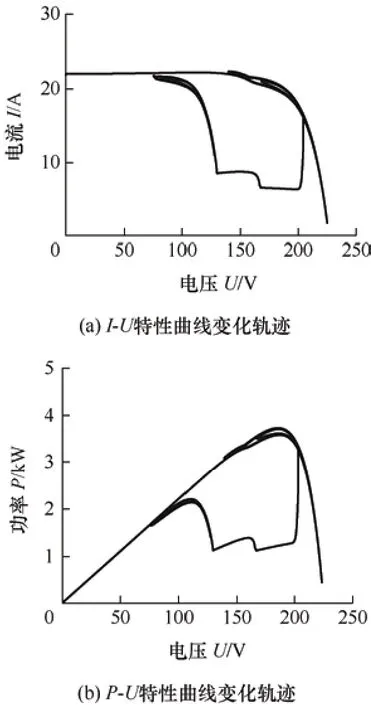
图10 光伏阵列的输出特性曲线变化轨迹
将图10 与图8 对比可见,采用所提算法进行控制时,光伏阵列的输出功率最终收敛于光伏阵列的全局最大功率点,MPPT 控制效果理想。
5 试验验证
为进一步验证所提控制方法的正确性与有效性,按图7 拓扑结构,搭建基于RT-LAB 的硬件在环试验平台如图11 所示。主要由上位机、以DSP28335 为核心的控制器、HBUREP-100 实时仿真机以及示波器组成。首先在上位机搭建如图7 所示的光伏MPPT 控制系统模型,然后通过将模型编译生成C 代码的方式载入实时仿真机中运行。

图11 基于RT-LAB 的硬件在环试验系统
5.1 扰动观察法控制结果
图12 为光伏阵列输出的电压、电流和功率随时间变化情况,由图12a 可见,起始时刻光照均匀,系统经过0.05 s 的动态调整后,输出电压稳定在180 V 左右,说明均匀光照条件下,扰动观察法能够顺利搜索到光伏阵列的最大功率点。0.2 s 时,有局部阴影产生,经过0.05 s 动态调整后,输出电压稳定在160 V 左右,对比图7 可见,该电压显然是局部最大功率点的工作电压,而非全局最大功率点工作电压。相对应光伏阵列实时输出电流、功率变化情况分别如图12b、图12c 所示,输出为局部最大功率点电流和局部最大功率。
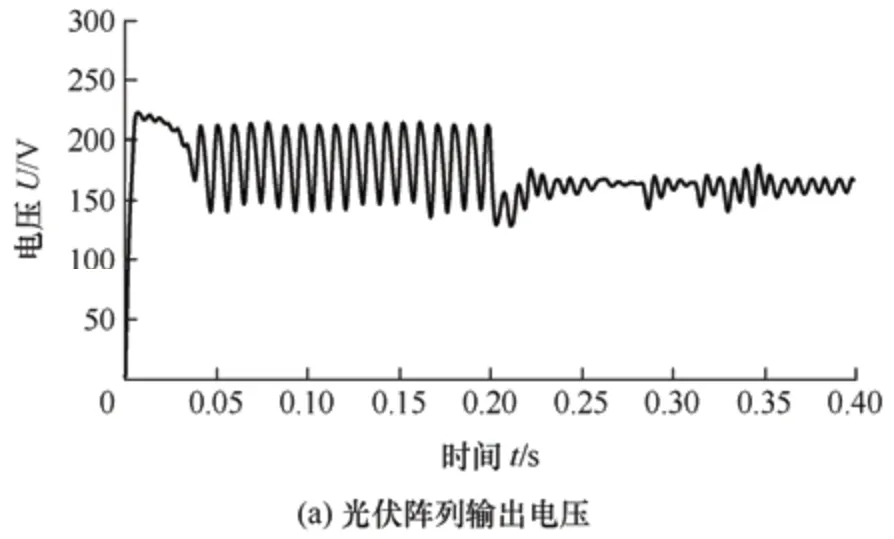
图12 光伏阵列输出电压、电流和功率波形
5.2 虚拟阻抗特性扰动法控制结果
图13 为光伏阵列输出电压、电流和功率随时间变化情况,由图13a 可见,起始时刻光照均匀,算法经过0.05 s 的动态调整后,输出电压稳定在180 V 左右,说明均匀光照条件下,基于虚拟阻抗特性扰动全局最大功率点跟踪控制方法能够顺利搜索到光伏阵列的最大功率点。0.2 s 时,有局部阴影产生,算法经过0.05 s 的动态调整后,输出电压稳定在100 V 左右,对比图7 可见,该电压显然是全局最大功率点工作电压,而非局部最大功率点工作电压,与之相对应光伏阵列输出电流和输出功率变化波形,如图13b 和图13c所示。
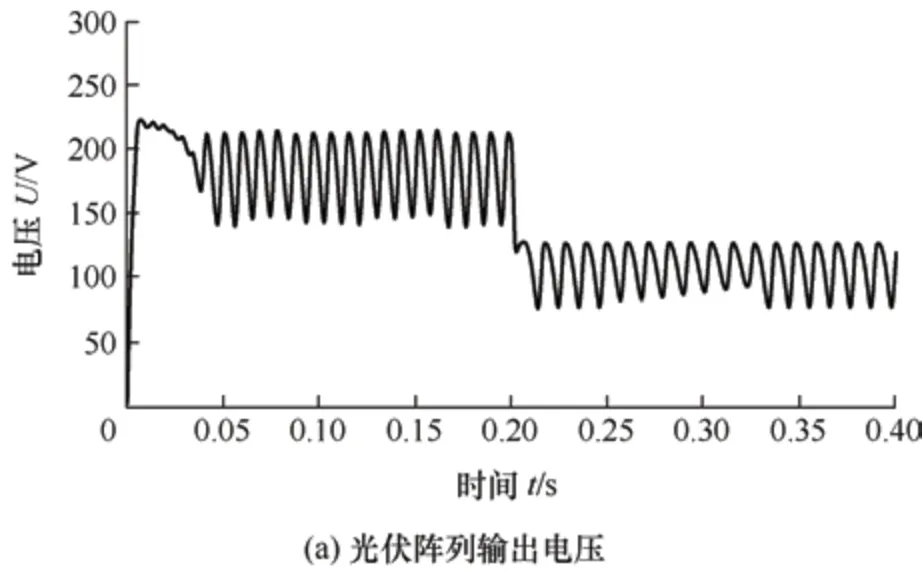
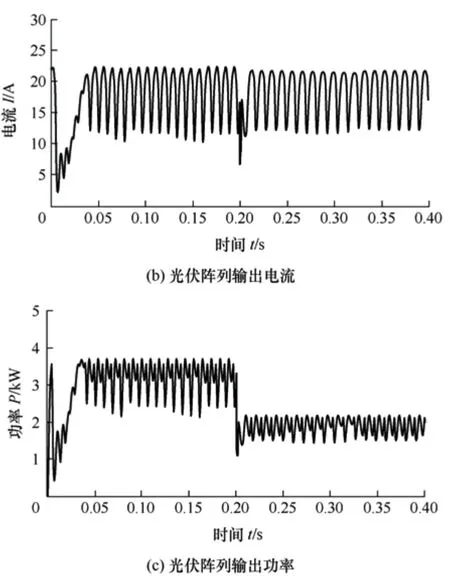
图13 光伏阵列输出电压、电流和功率波形
6 结论
针对光伏阵列P-U特性曲线在多峰值情况下传统最大功率跟踪控制方法无法准确搜索到全局最大功率点的问题,本文提出了一种基于虚拟阻抗特性扰动的光伏全局MPPT 控制方法。
(1) 当光伏阵列表面光照不均匀时,首先利用光伏阵列的虚拟阻抗特性对其I-U特性曲线上最大功率点所处的位置区域进行初步定位,确定光伏阵列工作点参考电压值。以上述参考电压为起始工作电压,再利用传统的扰动观察法对光伏阵列P-U特性曲线上的全局最大功率点实施准确跟踪。该方法将全局搜索机制引入到传统的扰动观察法中,提高了传统MPPT 算法在非均匀光照条件下的适用性。
(2) 采用所提出的基于虚拟阻抗特性扰动全局最大功率点跟踪控制方法只需对光伏阵列输出电压与电流进行测量,无需附加任何其他测量电路即可实现光伏阵列的全局最大功率跟踪,方法控制流程简单易实现。