智能电动轮椅的关键技术分析
2024-01-15孟楠方敏袁浩森梁源康姜扬
孟楠,方敏,袁浩森,梁源康,姜扬
(哈尔滨理工大学,黑龙江 哈尔滨 150080)
0 引言
根据联合国2022 年发布的公告,全球65岁及以上的人口数量至2050 年可增至16 亿。智能轮椅是将智能机器人技术应用于电动轮椅,结合计算机、人体工程学等相关领域的研究,实现机器视觉、主动避障、多传感器融合,涉及到了机械、计算机、电控、各类传感器等技术,目的在于为日益增多的老年人及残障人士提供更安全合理的出行方式。本文探讨智能轮椅技术国内外研究现状,介绍爬楼运动控制、健康监测、主动避障等系统组成,提出相关设计方向。
1 研究现状
1)国内研究。中国科学院自动化研究所于2000 年研制了一种具有视觉和口令导航功能并能与人进行语音交互的机器人轮椅[1],此项研究高度重视了智能轮椅人机控制界面的设计,使人能通过语音控制轮椅自由行走,轮椅可以实现简单的人机对话功能,并成功研制了中国第一台智能轮椅样机,从功能上来说,一般通过机械机构手动或电动实现,功能相对简单,智能化内容尚欠缺。主要考虑患者休息与“行走”功能的结合,目前的国内研究多集中在简单组合的初级功能上,主要使用对象为医用或病患。
2)国外研究。德国乌尔姆大学在商用轮椅基础上研制了轮椅机器人MAID[2],在人流拥挤的公共场所实现了自动识别和判断障碍后自动采取绕行动作,如图1 所示。麻省理工智能实验室的智能轮椅威尔斯利[3]为半自主式机器人轮椅,配备有计算机控制和传感器,安装Macintosh 笔记本电脑用于人机界面交互。系统有两种级别的控制:高级方向指令和低级计算机控制路线,用户拥有最高控制级别。轮椅系统提供低级控制,避障和保证正确的运动方向;用户和轮椅之间的人机界面提供高级控制,如图2 所示。

图1 轮椅机器人MAID

图2 轮椅机器人威尔斯利
2 关键技术分析
智能电动轮椅设计由爬楼运动控制系统、健康监测系统、主动避障系统组成。
2.1 爬楼运动控制系统
现有爬梯方式主要为:行星轮式、履带式和步进支撑式。
1)星轮式爬楼轮椅。是一种特殊的轮椅设计,可以通过特定的机构实现爬楼功能。该机构由若干个小轮构成,均匀分布在“Y”型或“十”字形系杆上。在平地行走时,每个小轮都可以绕自己的轴线自由旋转,在平坦地面上移动。需爬楼时,小轮的工作方式发生改变,随着系杆绕中心轴进行公转运动。通过这种公转运动,小轮可以协同工作,使得轮椅能够克服楼梯的高度差,实现爬楼功能。
2)履带式爬梯轮椅。2014 年首次发布于《物理医学与康复名词》第一版的轮椅设计。在电动轮椅的基础上加装了电控履带装置,以实现多种功能,包括爬楼梯、平地行驶和通过崎岖路面,其优点包括良好的着地性能、防滑性、耐磨损性和平稳性等。履带在各种地面条件下都能提供稳定的支撑和牢固的抓地力,不易打滑,具有较高的耐磨损能力。履带式爬梯轮椅最重要的特点是其能够爬升陡峭的楼梯。最大爬梯坡度可达45°。
3)步进支撑式爬楼轮椅。具有近百年历史的爬楼轮椅设计,在国外得到广泛应用。经过不断的演变和改良,已成为所有形式爬楼轮椅中安全性较高、但传动机构较为复杂的一种,其原理是模仿人体爬楼的动作方式。采用了两套支撑装置,交替提供支撑,以实现上下楼梯的功能。步进支撑式爬楼轮椅的设计考虑到了安全性,并通过模仿人体爬楼的动作方式,使用者能够相对稳定地上下楼梯。然而,由于其复杂的传动机构,需要较高的技术要求和精密的工程设计。因此,在实际应用中受到一定的限制,特别是在成本和可用性方面。
通过制造成本、实现方式、技术难度以及安全性多方面对比,建议在智能电动轮椅设计中采用履带式爬梯,如图3 所示。

图3 履带式爬梯
履带由传动皮带、固定片、固定杆、大滑轮以及多个小滑轮组成。驱动电机带动大滑轮旋转,继而带动整个履带进行运动。为防止在爬梯过程中发生打滑,履带式轮椅需要加装大功率驱动电机,动力强劲且可以随时刹车;同时需要使用摩擦力大的材料制作履带。
智能轮椅的本质是以人为中心的控制系统,应预设人为操作的控制系统,根据使用者的情况,充分发挥其性能。人机接口设计应考虑到不同使用场景下使用者的不同反应,以实现使用者和轮椅之间的和谐合作。
1)操纵杆控制。对方向的指向性明确,操作简单,是目前电动轮椅的基本配置,因此在多数智能轮椅上都依然保留了这一类控制接口。
2)按键或触摸屏控制。将轮椅的方向控制分为4 个或8 个方向的按键,优点是控制精确,缺点是操作不灵活,较复杂。
2.2 健康监测系统
健康监测系统由硬件架构设计、软件架构设计以及数据通信部分组成。硬件设计包括:驱动程序设计和传感器连接;软件设计主要包括:小程序设计和数据处理。健康监测系统整体框架如图4 所示。
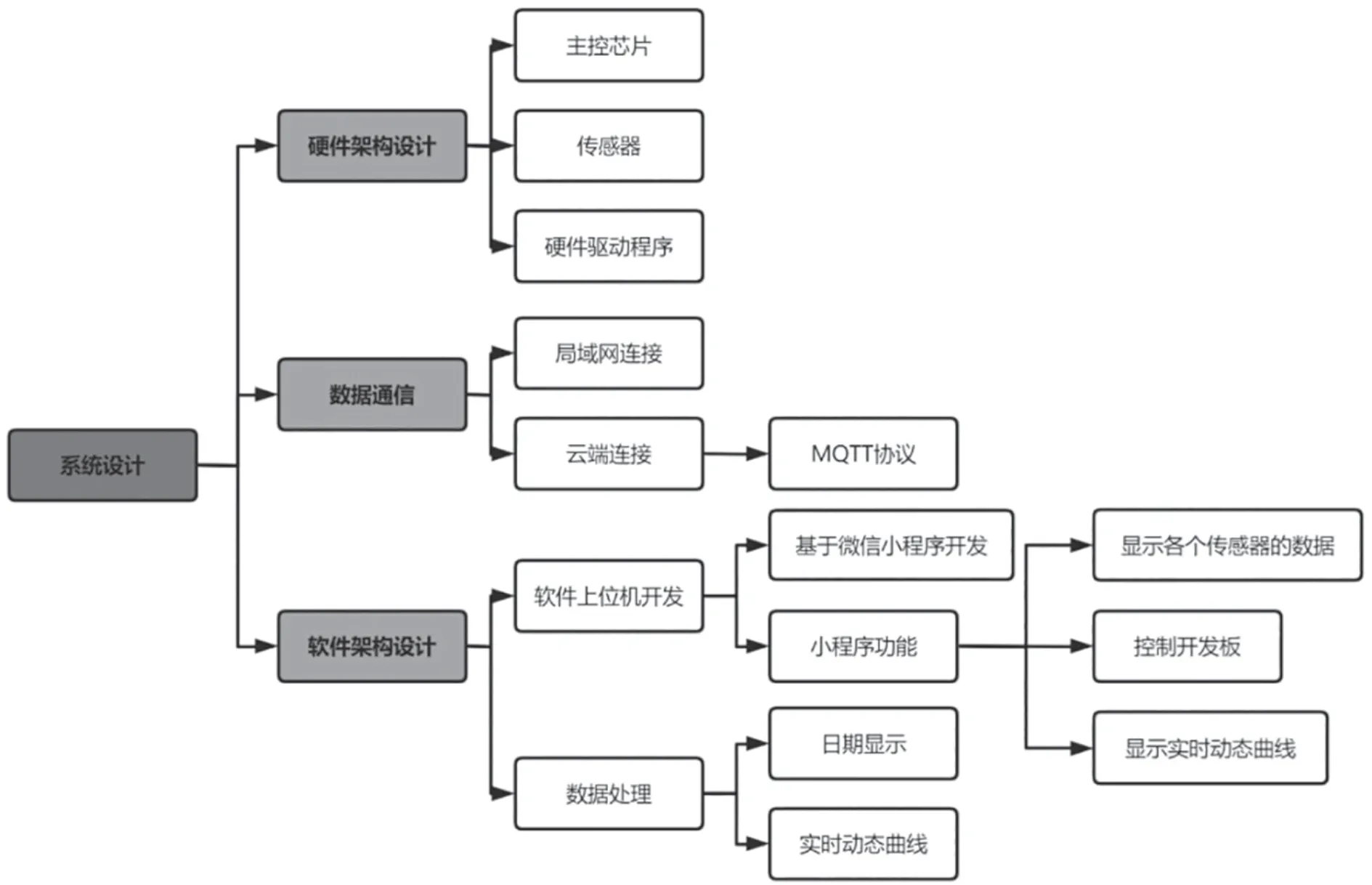
图4 健康监测系统整体框架图
1)硬件架构设计。首先对硬件的型号进行选择,主控芯片可采用STM32F103RCT6。传感器采用MAX30102 心率传感器、DHT11 温湿度传感器、MQ2 烟雾传感器。三种传感器组合实时监测人体的心率、血氧等生理参数,同时也可监测环境中的温湿度、烟雾浓度等环境参数。通信模块采用ESP8266 WIFI 模块。其中,MAX30102 心率传感器由红光LED、光器件、光电检测器和带环境光抑制的低噪声电子电路组成。电路图如图5 所示。
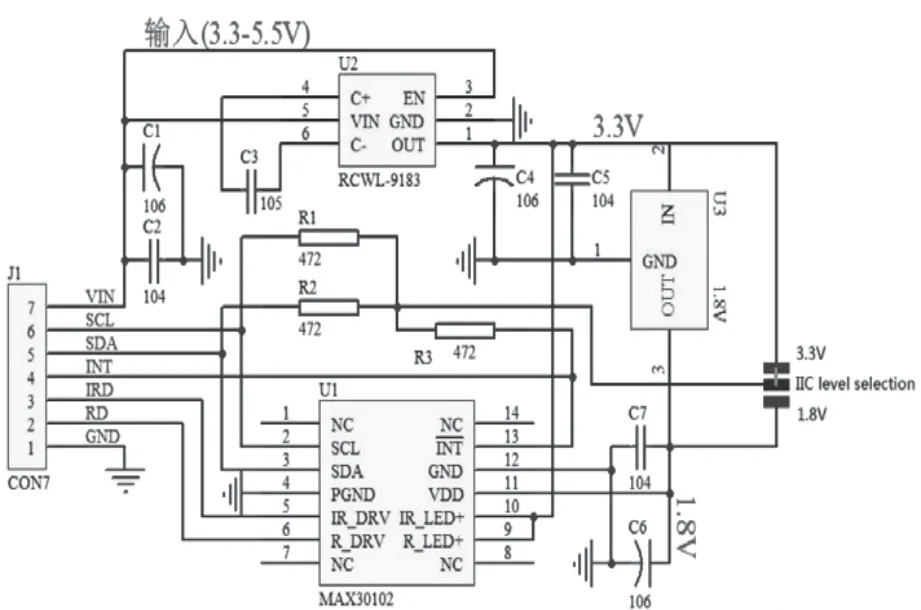
图5 MAX30102电路图
MAX30102 采用光电容积法(PPG)完成测量,脉搏波信号采用LED 光源和探测器为基础,经过人体血管和组织反射、吸收后的衰减光,标记出血管的搏动状态并测量脉搏波[4]。PG 信号获得简单,测量装置易于佩戴等特点逐渐成为非医学条件下测量血氧、脉搏及心率的主要方法。MAX30102 通过IIC 驱动,将MAX30102心率传感器引脚连接STM32F103min 单片机的五伏引脚,GND 连接五伏引脚对应的GND,SCL 连 接PC12,SDA 连 接PC11,INT 连 接PA5。通过设计驱动程序,接收MAX30102 心率血氧传感器返回的数值,计算心率血氧数值。
2)软件架构设计。基于微信小程序进行上位机设计。主界面:小程序首页,接入实时天气平台API,获取当前位置的天气信息,显示控件按钮选择不同的功能;健康监测:显示MAX30102 心率血氧传感器采集到的人体的心率、血氧值,实时监测并显示;环境监测:显示DHT11 温湿度传感器、MQ2 传感器所采集到的环境参数数据,实时监测并显示;实时曲线显示:开发实时动态曲线功能,接收服务端消息,实时刷新曲线。
3) 数 据 通 信。STM32 开 发 板 通 过ESP8266 WIFI 模块连接局域网(路由器、手机热点等WIFI 网络),ESP8266 通过互联网连接至远程MQTT 服务器(MQTT Server),将数据储存在云端,供多个客户端进行访问,轮椅使用者及其家人都可随时获取数据,数据传输采用MQTT 协议。MQTT 协议是一种基于发布/订阅(publish/subscribe)模式的"轻量级"通讯协议,构建于TCP/IP 协议上,作为一种低开销、低带宽占用的即时通讯协议,使其在物联网、小型设备、移动应用等方面有较广泛的应用[5],其中包括机器与机器之间的通信(M2M)以及物联网环境(IoT)。
2.3 主动避障系统
方案一:采用红外线传感器,根据发射出的红外线,被障碍物反射,接收部件据此做出判断是否存在障碍物。红外线反射时,输出低电平信号;没有红外线反射时,输出高电平信号[6]。探测到障碍物即输出脉冲,输入至主控板中进行处理,输出电信号对电机驱动模块进行控制,实现避障的功能。
方案二:采用超声波传感器,传感器接收到反射的超声波,通知主控板前方有障碍物,如主控板未接到通知,则可以向前行驶。
两种方案比较可知。方案一优于方案二,电路简单,成熟度高,性能稳定,避免因电路的复杂性造成避障功能不稳定。
3 结语
智能电动轮椅是工具智能化发展的衍生产品,智能化目的在于为日益增多的老年人及残障人士提供更安全合理的出行和生活方式。相关产品的功能应该日益完善,进一步提高安全可靠性。相信随着智能化、模块化、图形处理技术、计算机科学与技术以及传感器技术的发展,系列产品能够得到更为完善的发展与进步,广泛地应用并服务于有所需要的人群当中。
