基于TRIZ 理论的刺梨自动采摘机设计
2024-01-15吴一晨卢桂菊蔡树芳谢志平
周 江, 邓 静, 吴一晨, 卢桂菊, 蔡树芳, 谢志平
(贵州师范大学机械与电气工程学院,贵州 贵阳 550025)
0 引言
刺梨(Rosa roxburghiiTratt)又称木梨子、缫丝花,果实富含多酚、超氧化物歧化酶(SOD)、维生素C等多种营养物质[1]。刺梨采摘是刺梨生产的重要环节,目前主要靠人工或使用一些采摘器进行辅助采摘,效率低、强度大、采摘耗时耗力。刺梨普遍生长在丘陵山区,并且刺梨枝条和果实上都布满了毛刺,这对采摘造成了一定的困扰,因此如何快速进行采摘成为一个急需解决的问题。国内外对于自动化刺梨采摘机的研究较为缺乏,罗兵等[2]将TRIZ 理论和AD 理论有机结合,提出了基于TRIZ 和AD 理论的刺梨采摘机创新设计。黄远翔等[3]设计了一款电动采摘器,该采摘器通过调节伸缩杆的长度,能够对处于较远位置的刺梨实现采摘。雷倩等[4]根据杠杆原理设计了一款剪刀式采摘器,通过握住手柄使球头刀对刺梨进行剪切,该设计虽然结构小巧、操作简单,但是难以满足刺梨规模化采摘的需求。总体来说,刺梨自动化采摘还处于相对较低水平。随着农业机械化、智能化的快速发展,刺梨采摘环节迫切需要引入机械化自动采摘设备以提高作业效率,智能农机能够助力刺梨产业提质增效,不断助推刺梨产业高质量发展。
为了提高刺梨采收效率,运用TRIZ 理论设计了一款操作方便、功能多样的刺梨自动采摘机,并利用UG 软件进行三维模型的构建。通过对重要部件进行有限元分析,确定其强度满足相关作业要求,验证了设计方案的可行性。
1 TRIZ 理论概述
1.1 TRIZ 理论简介
TRIZ 意思是发明问题解决理论,翻译成英文为Theory of the Solution of Inventive Problems,我国学者将其译为“萃智”[5]。根里奇·阿奇舒勒(G.S.Altshuller)和他的研究团队分析了大量高水平专利和案例,归纳出了发明创造的一般规律,其目的在于探索人们进行发明创造、克服发明障碍活动中所遵守的一定原理与规律,又被称为创新“点金术”[6]。阿奇舒勒等通过对大量的专利成果进行归纳、总结,提出了TRIZ 中具有广泛应用意义的40 个发明原理,确定了矛盾矩阵,给出了物质-场模型分析,以及技术系统进化法则等,确立了TRIZ 完整的理论体系[7]。
1.2 TRIZ 解题模式与流程
运用TRIZ 理论解决问题首先要把实际问题归纳转换成TRIZ 标准问题模型,接着运用TRIZ 分析问题和解决问题的工具,这样就可以形成TRIZ 的标准方案模型,最后演绎应用形成实际解决方案,这个方案是针对特定的发明问题产生特定的创新方案[8]。应用TRIZ解决问题的主要流程如图1 所示。
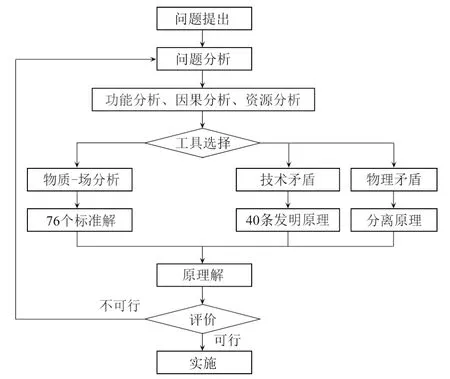
图1 TRIZ 理论解题流程Fig.1 TRIZ theory problem-solving process
2 问题描述
刺梨果实表面长满了毛刺,这使得采摘极为不易。刺梨采摘环节多数情况下是靠人工,但这种采摘方式不仅效率低,而且劳动强度大。现阶段刺梨采摘主要还是借助可穿戴刺梨采摘装置进行抓取或者使用便携式采摘工具对刺梨进行剪切,虽然在一定程度上减少了劳动者采摘时受到刺梨枝条棘刺和果实上毛刺的伤害,但这些只能作为简易辅助采摘工具,没有实现自动化采摘的需求。常见的刺梨采摘过程存在的问题:①劳动者体力劳动投入大,刺梨主要生长在向阳山坡和灌木丛中,采摘环境较为恶劣,劳动者需要克服这些不利因素;②采摘效率低,人工采摘有一定的局限性,劳动者采摘一定时间后需要休息;③自动化采摘程度低,刺梨的采摘期很短,需要在一定的时间内完成刺梨采摘,这需要劳动者付出更多的体力劳动;④采摘后的刺梨通常放在随身携带的简易装载器具里,装满一定数量后再转到另外地方储存,这不仅费时费力,还影响采摘效率。
3 问题分析
3.1 问题解决的IFR 描述
最终理想解,顾名思义就是使技术和产品处于相对理想状态时的解。对最终理想解进行合理的分析,有助于设计者克服思维惯性,避免了传统设计方法的弊端,提升了设计效率[9]。基于最终理想解的理念对刺梨自动采摘机进行分析,如表1 所示。
3.2 功能分析
通过分析发现刺梨自动采摘机的采摘功能不足,不能将刺梨的漏采率控制到预期值,为了改善采摘效果和提高采摘机性能,对刺梨自动采摘机的采摘装置进行系统功能分析。
3.2.1 确定组件
系统作用对象:刺梨。
系统组件:工作平台、旋转爪、固定爪、电动机、锥齿轮和连接件。
超系统组件:箱体。
3.2.2 组件作用分析
对组件进行相互作用分析并且建立相互作用的矩阵表,若两组件之间有相互作用,用“+”表示,两组件之间不存在作用,则用“-”表示[10]。详细如表2所示。
由表2 可知,刺梨与工作平台、旋转爪和固定爪有相互作用;工作平台与旋转爪、固定爪、电动机、锥齿轮和连接件之间有相互作用;旋转爪与固定爪、电动机和锥齿轮之间有相互作用;电动机与锥齿轮有相互作用;连接件与箱体有相互作用。
3.2.3 功能模型
采摘装置功能模型如图2 所示。

图2 采摘装置功能模型Fig.2 Functional model of picking device
3.3 因果链分析
因果链分析是全面识别工程系统缺点的分析工具,因果链分析可以挖掘隐藏于初始缺点背后的各种缺点。由于现有的采摘装置存在采摘效率不高的问题,针对这一问题进行因果链分析,如图3 所示。
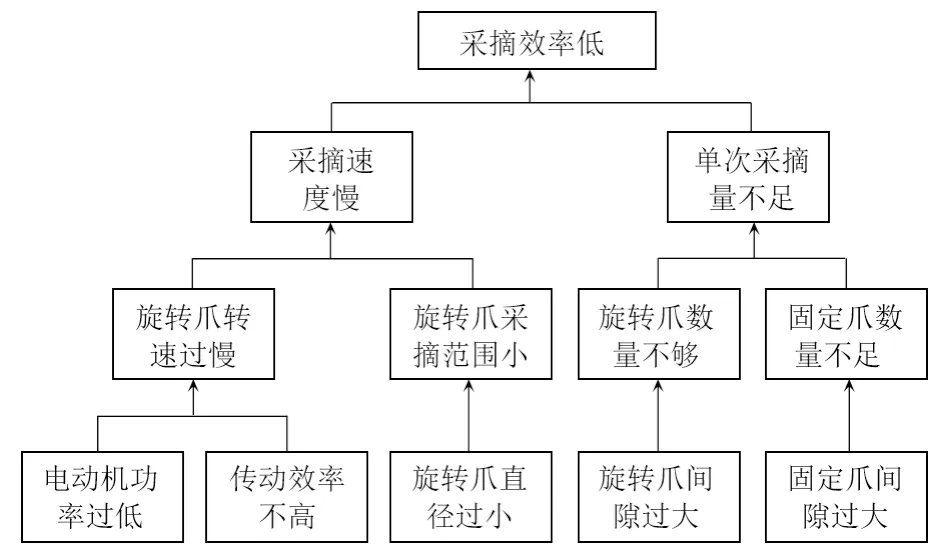
图3 因果链分析Fig.3 Causal chain analysis
3.4 九屏幕法分析
九屏幕法也称九宫格法,是一种分析系统的构成与环境及系统性考虑问题的方法。是指在分析和解决问题的时候,除了要考虑当前系统,还要考虑技术系统中的子系统和超系统;此外在考虑系统的过去和未来的同时,还应考虑子系统的过去和未来,超系统的过去和未来,要动态地看待问题的发展[11]。刺梨自动采摘机九屏图如图4 所示。
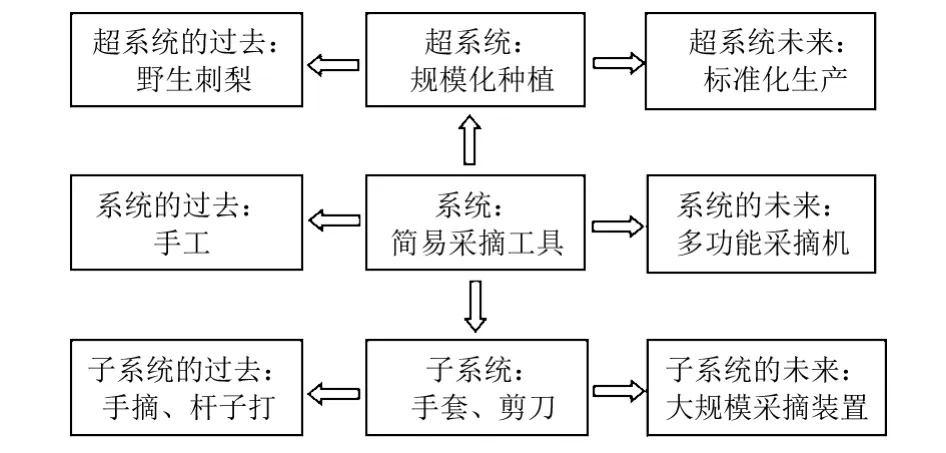
图4 九屏图分析Fig.4 Nine screen analysis
从系统未来发展的角度,可能的解决方案有研发新的自动化设备和智能化采摘装置,使采摘更加方便快捷。
4 运用TRIZ 工具解决问题
4.1 技术矛盾与发明原理
技术矛盾指当技术系统的某一个特性或参数得到改善的同时,导致另一个特性或参数发生恶化而产生的矛盾[12]。研究的目标是提高采摘机的自动化水平,因此,自动化程度为技术矛盾中要改善的参数,由于需要增加采摘装置和输送装置,使采摘机的复杂程度提高,所以复杂性是恶化参数。查阅矛盾矩阵表,得到参考发明原理:(10)预先作用;(15)动态特性;(24)借助中介物。
根据发明原理24 提供的思路,在工作平台边上引入一条输送带,将带有挡板和刮板的输送带安装在工作平台的底部收集口上,输送带自动将工作平台上的刺梨输送到收集箱中,这样可以实现刺梨的自动输送,如图5 所示。
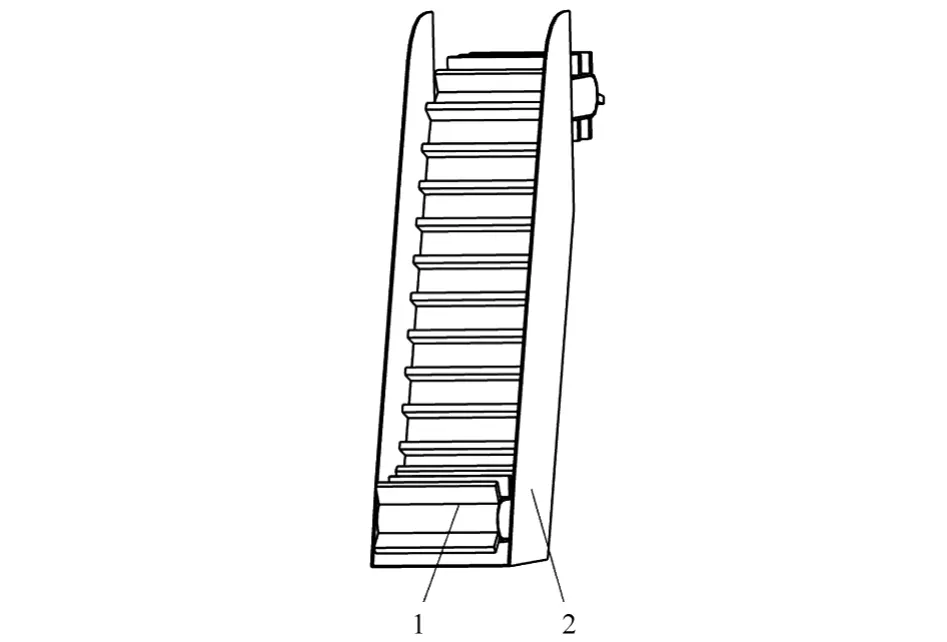
图5 输送装置Fig.5 Conveyor device
4.2 物理矛盾及分离原理
物理矛盾指在创新过程中对一个技术系统中的同一个要素或同一个参数有不同的要求[13]。为了可以收集更多刺梨,需要工作平台大;为了减少采摘机总体质量,希望工作平台小,即工作平台既要“大”又要“小”。考虑到该参数“工作平台”在不同的“空间上”和“条件下”具有不同的特性,因此该矛盾可以从“空间”和“条件”上进行分离。选择“空间分离和条件分离”原理,得到解决方案。
发明原理7:嵌套原理。将输送装置和工作平台有机结合,使输送装置嵌入到工作平台上。刺梨掉落至工作平台上,输送带随即将刺梨输送到收集箱,减少刺梨的堆积。
发明原理14:曲面化原理。将工作平台由平面换成球面,使刺梨掉落后向中间聚拢。
发明原理40:复合材料。采用质量较轻的复合材料制作工作平台,在满足既定尺寸大小的同时又减轻了机身整体质量。
5 设计方案
5.1 三维模型设计
运用TRIZ 理论对采摘机的结构进行了创新,最终完成刺梨自动采摘机总体方案的设计,三维模型如图6 所示。

图6 自动采摘机结构Fig.6 Structure of automatic picker
刺梨自动采摘机主要由工作平台、旋转爪、固定爪、输送装置和收集箱等组成,输送装置包括有刮板式输送带和挡板,刮板式输送带能将刺梨平稳输送到收集箱,挡板的作用是防止刺梨掉落。采摘机工作时,在驱动电机的作用下机器向前移动;行驶至采摘目的地时,开启旋转爪和输送带开关,旋转爪开始转动,刺梨在旋转爪牵引和固定爪的拉扯中掉落到工作平台上。工作平台具有一定的倾斜弧度,掉落的刺梨会滚落到输送装置前,随后刮板式输送带将刺梨陆续输送至收集箱中。当收集箱装满一定数量的刺梨,首先打开箱门,箱门和箱体底部均安装有滚筒,便于收集箱的拖动,接着快速抽出收集箱,然后将刺梨打包收集好,最后将空的收集箱放入箱体中,等待下一次收集箱装满,至此采摘机完成一次刺梨自动采摘、输送和收集动作。
5.2 仿真试验与有限元分析
利用三维建模软件UG 对刺梨自动采摘机进行零部件的建模和装配,并对旋转爪进行了运动仿真,旋转爪如图7 所示。定义连杆、运动副、驱动后,根据旋转爪工作要求及运动特性,对仿真时间和仿真步数分别进行设置,解算后得到旋转爪的运动仿真结果[14]。仿真结果表明,采摘装置的旋转爪结构设计合理,旋转爪与固定爪之间的距离和角度满足相关设计要求,两者不存在干涉现象,旋转爪旋转路径满足采摘刺梨作业要求。

图7 旋转爪结构Fig.7 Structure of rotating jaw
利用UG 软件对采摘装置的主要部件爪齿进行有限元分析,如图8 所示。分析结果表明,爪齿的最大工作应力不超过材料的许用应力,满足强度和刚度的要求[15]。

图8 爪齿有限元仿真分析结果Fig.8 Fite element simulation analysis results of jaw teeth
6 结束语
为解决传统刺梨采摘装置采摘效率低、劳动强度大等问题,利用TRIZ 理论得出了刺梨自动采摘机的设计思路,建立了采摘装置的功能模型。通过对采摘机自动化水平较低进行描述,进行技术矛盾分析,查阅矛盾矩阵表,从发明原理中找到对应的解决方案。运用UG 软件完成了刺梨自动采摘机的三维建模,并对主要部件爪齿进行了有限元分析,分析结果表明满足设计要求。刺梨自动采摘机具有功能多样、制造成本低、使用方便等优点,能有效提升刺梨采收效率,降低刺梨采收成本,减轻作业人员劳动强度,对刺梨产业的发展具有积极的促进作用。
