饲料收获机发动机过载自适应调整装置及方法
2024-01-15李雷霞赫志飞张小伟姜贵川李春友
李雷霞, 赫志飞, 张小伟, 姜贵川, 李春友
(中机美诺科技股份有限公司,北京 100083)
0 引言
随着科技和经济的双重发展,人们对物质生活的品质要求不断提高,对肉类和奶制品的需求量越来越大,无疑加速了畜牧产业的发展。伴随着畜牧产业的发展,用户对饲料收获机在功能、可靠性、作业效率等方面的要求也越来越严格,这就使得收获机在设计研发过程中,除要提高关键零部件可靠性和整机质量外,还需要考虑降低驾驶员的劳动强度和提高收获机作业效率[1]。发动机过载自适应系统可一键操作实现作业速度控制,减少驾驶员的劳动强度,可以降低作业过程中因过载造成工作部件堵塞而停机的情况,减少机器故障,从而提高作业效率。
1 研究必要性
我国是农业大国,农业机械装备自动化和智能化是实现我国农业现代化的前提和根本。而青贮饲料收获季节较短,过早、过晚收获都会造成饲料营养的损失,用户对收获机的工作性能和作业效率提出更高的要求[2]。设计人员在新产品设计中,需要以现代设计理论和方法为指导,以知识为依托,以人工智能技术为实现手段,以设计自动化为目的,实现产品设计的定制化、自动化、智能化和网络化,同时提升收获机信息收集、智能决策和精准作业能力,促进我国由农机制造大国向农机制造强国转变,满足用户日益提高的需求[3-4]。
随着国内畜牧业的逐步发展,青饲料的种植面积也随之增加,如何在有限的时间内高效率收获青饲料是用户需要面对的一个大问题,所以,驾驶员在收获作业时,为提高收获效率,经常增加收获幅宽或提高作业速度,从而引起发动机超负载作业,这样会减少发动机和其他主要工作部件的使用寿命;而发动机超负载作业也会使发动机转速下降,从而使工作部件的转速也下降,对有些工作部件会发生堵塞,造成收获机停机。另外,收获中作物的产量会有变化,如果收获时碰上产量高的地况或收获时碰上堵塞超负载的情况,发动机也会因超负载而熄火。而现有收获机一般没有发动机过载自适应调整装置,驾驶员如能熟练操作时,收获效率会高些,而不熟练则收获效率低,收获时因过载堵塞则会耽误大量时间。
针对上述问题,饲料收获机作业时,因其具有工况相对复杂、连续作业时间长、负荷大及作业故障率高等特点,迫切需要设计一种发动机过载自适应控制系统,使收获机在作业时,根据负载变化,实时调整工作状态,实现作业过程中负载自适应[5-8]。实现有效减少驾驶员劳动强度,提高收获机的自适应技术,提高收获机作业效率,同时对于提高我国农业现代化和农业机械的智能化都有积极的促进作用。
2 系统结构与工作原理
2.1 整体结构
目前,我国大中型农场使用的主要为不分行收获的自走式饲料收获机,在田间可一次性完成对作物的收割、切碎、揉搓和抛送装车等作业[9]。饲料收获机发动机过载自适应系统的整体结构由发动机、行走泵电磁阀、控制器、启动按键、操纵手柄和显示器等组成,如图1 所示。
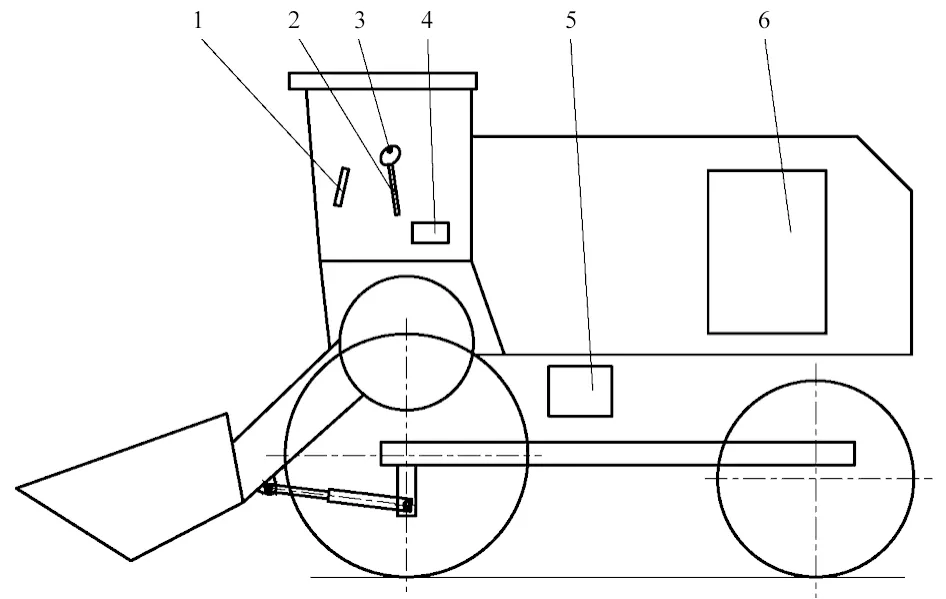
图1 过载自适应系统整体结构Fig.1 Overall structural of overload adaptive system
发动机为收获机提供行走和工作动力,可以通过胶带或齿轮箱体输出到行走或工作部件,现有收获机都普遍使用“国Ⅲ”“国Ⅳ”发动机。发动机具有ECU 控制单元,主要参数可以通过CAN 总线实时传输给显示器[10]。行走泵电磁阀安装在行走泵上,自适应一键启动按键安装在操纵手柄上,操纵手柄、显示器及控制器安装在驾驶室内。控制器与操纵手柄、显示器和行走泵电磁阀相连,控制器可以接收来自操纵手柄的电压信号,通过信号可以判定收获机的前进、停止(中位)和倒车状态。操纵手柄设有中间位置,即中位,向控制器输出一固定的电压信号;操纵手柄从中位向前推动的时候,电压信号会从小变大(或从大变小)地逐步变化,满足操纵手柄越往前推,收获机的前进行走速度越快;同样,操纵手柄从中位向后推动的时候,电压信号会从大变小(或从小变大)地逐步变化,满足操纵手柄越往后推,收获机的倒车速度越快。根据行走泵的要求,一般是前进和倒车时,控制器分别输出电流,通过不同的电流大小改变行走泵的排量,从而改变收获机的速度;输出的电流值越大,前进或倒车的速度就越快,从而实现收获机的前进、倒车,以及速度的快慢。一般饲料收获机在正常作业过程中,发动机转速保持在额定转速上下浮动,负载百分比值保持在一定范围内浮动。正常收获作业中,转速突然下降,能反映出发动机过载;当负载百分比超过限值,表明发动机过载。发动机过载会引起工作部件堵塞而停机,从而耽误农时。根据这一原理,将这两个参数及收获机行进方向一起作为发动机过载的判定条件,更为安全可靠。发动机过载自适应控制系统架构如图2 所示。

图2 控制系统总体架构Fig.2 Overall architecture of control system
2.2 工作原理
发动机主要参数通过CAN 总线显示到显示器上,特别是负载百分比值,是发动机实际输出的扭矩与最大扭矩的比值,用户可以实时看比值判断发动机当前的负载状态,通过调节整车前进速度使收获机作业效率达到最佳[11]。如果发动机负载增大,可以减慢收获机作业速度,有效防止收获机收获时因负载过大转速急速下降造成切碎滚筒和抛送部件堵塞;如果负载变小,可以加快作业速度来提高作业效率[12]。所以驾驶员操作时,既要提高收获效率,又注意收获机堵塞或发动机熄火而耽误农时,有时虽然发现发动机过载而降低作业速度时却因操作慢也会产生堵塞。本研究的一键启动发动机过载自适应控制系统,其核心单元控制器可以通过操作手柄的信号判定收获机作业,同时通过CAN 总线数据传输检测到发动机当前作业的转速和负载百分比值,综合考虑3 个条件来可靠判定发动机是否过载。在过载状态下,控制器通过减少行走泵电磁阀的电流,来降低收获机作业速度,即减少了收获机作业中的喂入青饲料量,相应减少了负载,从而实现发动机过载的自适应调节,减少驾驶员频繁操作手柄,减少手眼协作的疲惫紧张感,相对解放双手,降低了操作劳动强度。
从发动机过载自适应系统的整体结构来看,显示屏能实时查看发动机转速和负载百分比值等参数,操纵手柄上有自适应按键,可实现一键启动,实现控制器对发动机状态检测,及时预判发动机是否过载,并能通过对行走泵排量的控制,实现收获机作业速度的快慢。自适应调节系统具有简单、效率高和运动品质好的优点,但控制系统比较复杂,可靠性需要多次优化、多次试验来应对作业的复杂工况[13-14]。
3 控制流程
饲料收获机发动机过载自适应调整系统是一种精准农业的应用。显示屏有工作界面,可实时显示发动机负载百分比值、发动机转速、机油压力和冷却液水温等主要参数。自适应系统需要一轮轮试验,不断调节控制器的参数,还要结合控制对象的特性,因为液压系统本身存在突出的非线性和不确定,对研究人员进行数据分析也有较大的困扰,需要有精确的数学模型和智能控制算法,分析和判定控制器的最优输出[15]。
发动机过载自适应调整系统控制流程如图3 所示,系统开机上电,显示器点击自适应调整界面进行系统参数设置,设置发动机负载百分比限值和发动机转速限值;负载百分比限值及发动机转速限值都是研究人员多年来在饲料收获机试验及作业中所积累的经验值。一键模式不启动时,驾驶员作业时执行手动操作,由操纵手柄控制收获机的前进、停止、倒车,以及速度的快慢。一键模式启动自适应模式,控制器判定机器前进、发动机负载百分比值≥限值和发动机转速≤限值3 项条件,若同时满足,控制器向行走泵电磁阀发出减少电流的指令,相当于减少收获机作业速度,即减少了收获机喂入量及发动机负载,此时控制器继续判断是否还同时满足上述3 项条件,如仍同时满足则继续向行走泵电磁阀发出减少电流的指令,一直到不同时满足上述3 项条件为止。当控制器不执行发动机过载自适应调整时,控制器不向行走泵电磁阀发出减少电流的指令,收获机作业速度由操纵手柄控制。
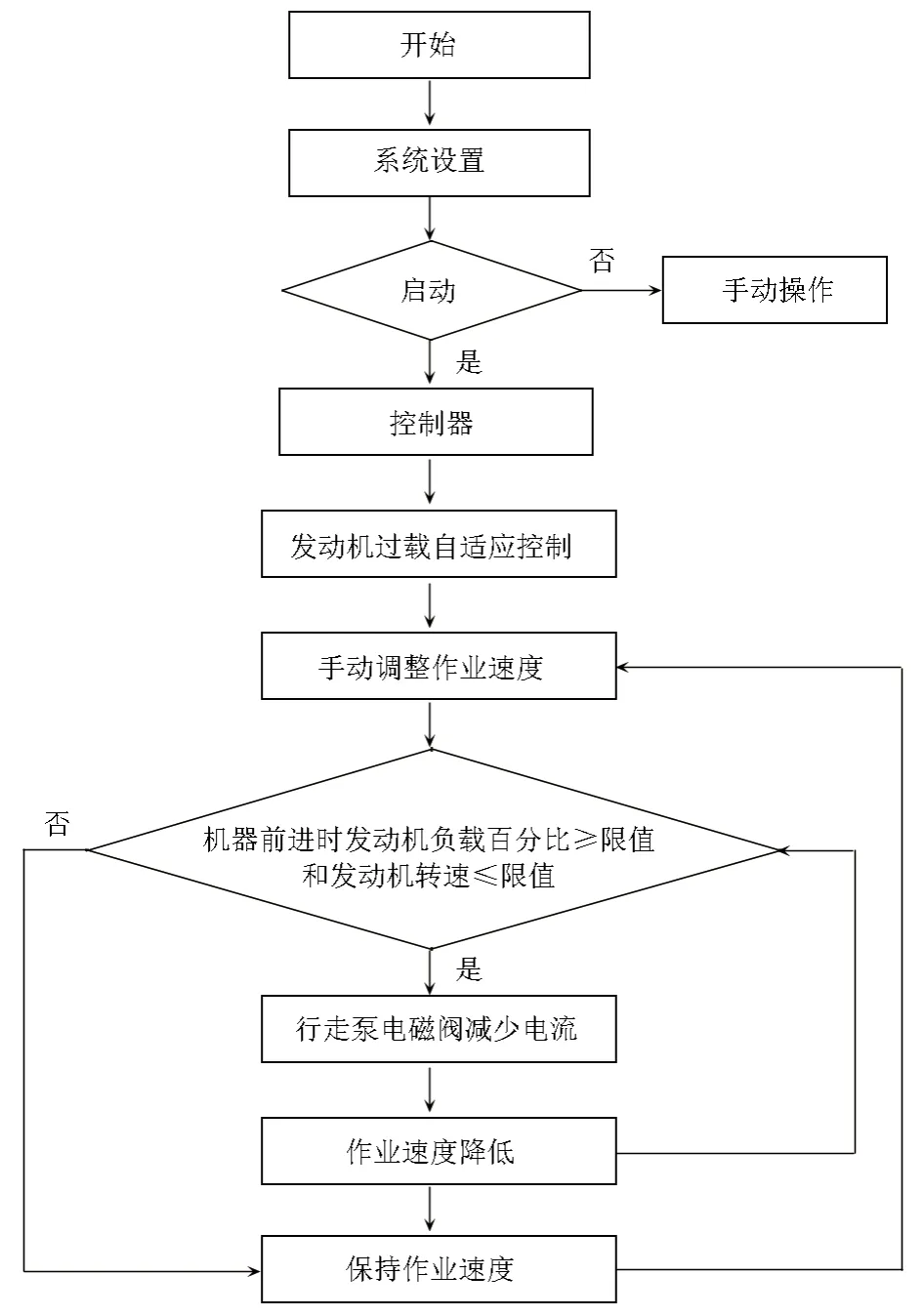
图3 过载自适应系统控制流程Fig.3 Control flow of overload adaptive system
在2022 年4 个月的田间试验中,由于不同地况饲料作物的长势密集程度及高度不同,收获过程中的饲料喂入量是不一致的,驾驶员手动操作作业速度不能保持一致,如果长势高或作物密集,瞬时的喂入量大,如果作业速度又快,发动机会过载,作业速度稍有操作不当就会导致工作部件转动慢而堵塞,所以驾驶员操作需关注显示器上发动机的实时参数,一旦发现过载就需要灵敏操作手柄降低作业速度,对驾驶员也提出更高的要求。发动机过载自适应调整系统可根据发动机负载性能及功率曲线,设定一致的工作参数限值,能一键启动发动机自适应调整系统,能有效减少驾驶员频繁操作,有效减少驾驶员的操纵强度,在较大程度上提高青贮饲料收获机作业效率。
4 结束语
随着国内畜牧业的发展壮大,青饲料的种植面积也随之增加,使用收获机进行作物的收获越来越普遍,同时对收获机在收获效率、操作舒适度及可靠性方面都提出了更高要求。为减轻驾驶员作业强度,设计开发了收获机发动机过载自适应调整系统,一键启动模式控制,能有效减少驾驶员的工作量,降低了劳动强度,节约了因堵塞而耽误的农时,提高饲料收获机的作业效率,促进我国农业机械向舒适性、操作方便性及智能化方向发展。
