基于北斗导航技术的农机作业数据监测终端产品应用研究
2024-01-15白卫卫孙乐明王战洪李广兴周鹏立
白卫卫, 孙乐明, 王战洪, 李广兴, 周鹏立, 徐 培
(1.河南省舞阳县农业机械技术中心,河南 漯河 462000; 2.漯河市农业机械技术中心,河南 漯河 462000;3.国家农机装备创新中心,河南 洛阳 471000)
0 引言
在农业现代化和农机智慧化水平不断提升的国家战略背景下,随着定位系统、数据感知、传输分析等物联网信息科技的不断进步,农业机械智能化、智慧化已成为我国农业现代化进程中的必然环节[1-2]。截至2021 年底,我国农用拖拉机保有量2 173.06 万台、稻麦联合收获机162.72 万台、玉米联合收获机61.06 万台,其中以北斗和5G 等信息技术为支撑,加装北斗卫星导航的拖拉机、联合收获机超过60 万台,不足动力机具总保有量的40%[3-4]。然而受到我国地域间农业生产方式差异及土地现状影响,智慧农业机具在大农场及农机合作组织较为集中[5]。传统农机具已无法满足农业生产需要,“强化农业科技和装备支撑,建设智慧农业”已列入“十四五”规划和2035 年远景目标,发展智能农机是我国农业持续高质发展的重要手段,智能农机监测设备是农业智能化重要的实现途径[6-7]。
近年来,以北斗卫星导航系统为基础,以物联网技术为载体的农机作业监测设备不断发展,但市场终端产品五花八门,质量参差不齐,严重影响农业机械智能化的发展,随着农业现代化进程不断加快,结合我国农机保有现状,优化农机作业监测产品结构,提高农机作业监测产品可靠性等刻不容缓[8-10]。为此,河南省漯河市农业机械技术中心联合国家农机装备创新中心等单位,在河南省农业机械技术中心作业补贴项目支持下,开展基于北斗卫星定位的农机作业监测终端面积误差、静态坐标点漂移、轨迹偏移等技术指标试验,针对解决区域内农机作业监测产品质量差异化应用需求,向使用后装远程运维终端的农机部门、农机合作社和农机个体户提供主流农机作业监测产品可信任的作业数据,为农机管理部门、农机制造企业及行业发展趋势提供农机智能化发展数据支持[11-13]。
1 试验材料与方法
1.1 试验地块
试验地块选自河南省舞阳县北舞渡镇农机合作社试验用地,经度113.395 8°E、纬度33.378 0°N,选取其中约0.267 hm2空白地块为本次试验用地。
1.2 试验项目
试验项目及内容如表1 所示。

表1 试验项目及内容Tab.1 Test items and contents
1.3 试验设备
1.3.1 机器设备
以谷物联合收获机、拖拉机挂接旋耕机为研究对象,进行表1 中的试验项目测定,设备信息如表2 所示。

表2 试验用设备信息Tab.2 Test equipment information
1.3.2 远程运维终端设备
选择国内市场来自于8 家农机作业监测设备企业的主流产品,设备样机信息如表3 所示。

表3 农业作业监测设备样机Tab.3 Prototype of testing equipment for agricultural operations
1.4 试验方法
1.4.1 静态CEP50/95
各终端设备调度测试完成后,将设备定位天线放置于指定位置上(该位置由RTK 提前打点测量),开机后静态放置1 min 后开始试验,计时5 min 后结束试验。
1.4.2 断点续传
由国家农机装备创新中心IOT 平台接收试验设备数据,正常数据传输中,中断供电,10 min 后恢复供电试验结束[14-16]。
1.4.3 静态作业深度/状态
将各企业智能终端设备安装到试验作业农机,然后进行非作业姿态标定、作业姿态标定、计算绝对差值。
1.4.4 动态作业状态
由测试人员手持RTK 沿将试验田一周测算试验田面积,对各关键点进行定位取点,在试验田中间留白部分测算空白面积;将各企业测试智能终端设备安装到试验作业农机上,最后调试设备,测试人员以RTK为定准,各企业统一标准标定幅宽、作业深度等关键数据后进行试验作业。
2 试验结果与分析
2.1 静态CEP50/95
试验时间及RTK 标定如表4 所示。表4 中试验场地坐标经纬度为RTK 8 个基准点,定位后将测试产品分别放置基准点进行试验,结束后对比产品定位与RTK 定位精度,确保试验可靠性,HD 由于早期设备未完成,则此项试验在下午进行。

表4 各终端设备静态CEP 试验情况Tab.4 Static CEP test of each terminal device
由表5 和图1 可知,BD 定位整体向北偏移,中心点距离原始坐标点大概偏移0.85 m,偏移点位较为规则,整体精度较低;XX 点位整体向西北方向偏移,中心点距离原始坐标点大概偏移0.205 m,偏移点位较为集中,终端对该场景做过相应的处理;整体精度比较高,漂移程度较低;ZN 点位整体向北偏移,中心点距离原始坐标点大概偏移1.367 m,偏移点位较为分散;FJ 点位整体向东偏移,中心点距离原始坐标点大概偏移0.474 m,偏移点位较为分散,定位精度较高且漂移程度中等;YB 点位整体向西北偏移,中心点距离原始坐标点大概偏移0.1 m,偏移点位较为集中且点位较少,终端对该场景做过相应处理;定位精度较高且漂移程度较低;NL 点位整体向东偏移,中心点距离原始坐标点大概偏移1.342 m,偏移点位较为集中且点位较少,终端对该场景做过相应处理;定位精度较低且漂移程度较高;LM 点位整体向东南方向偏移,中心点距离原始坐标点大概偏移0.772 m,偏移点位较为分散;整体精度比较低;HD 点位整体向西南偏移,中心点距离原始坐标点大概偏移0.783 m,偏移点位较为集中;定位精度中等且漂移程度较高。

图1 静态测试平台结果Fig.1 Static testbed data

表5 静态CEP 试验结果Tab.5 Static CEP test results
2.2 断点续传试验
断点续传功能确保了设备在复杂的作业环境中能够完成作业数据传输任务,结果如表6 所示。

表6 断点续传试验结果Tab.6 Experimental results of breakpoint continuation
由于产品应用推广的使用对象及应用场景不同,断电续传功能的完善显得由为重要,避免设备在使用过程中由于农业环境等引起的数据异常,由表6 可知,除LM 外未能识别外均能在断电、恢复后继续上传数据,LM 分析设备调试或数据传输协议发生错误,LM无法屏蔽信号可能由于测试终端定位功能故障。
2.3 旋耕机作业试验
2.3.1 静态深度试验
试验农机初始RTK 标定数值如表7 所示。

表7 拖拉机挂接旋耕机RTK 初始标定Tab.7 Initial calibration of RTK of tractor mounted rototiller
由表8 和图2 可知,NL 和ZN 作业变化量相对准确;BD 图中曲线表现为抗抖动性较差,作业变化量相对准确;XX 与YB 终端监测的变化量与实际变化量差距过大;FJ 零点标识错误,姿态变化趋势和实际姿态变化趋势相反;HD 与LM 未能有效监测到机具姿态的变化。

图2 旋耕机智能终端静态深度测试Fig.2 Static depth test chart of intelligent terminal of rotary tiller
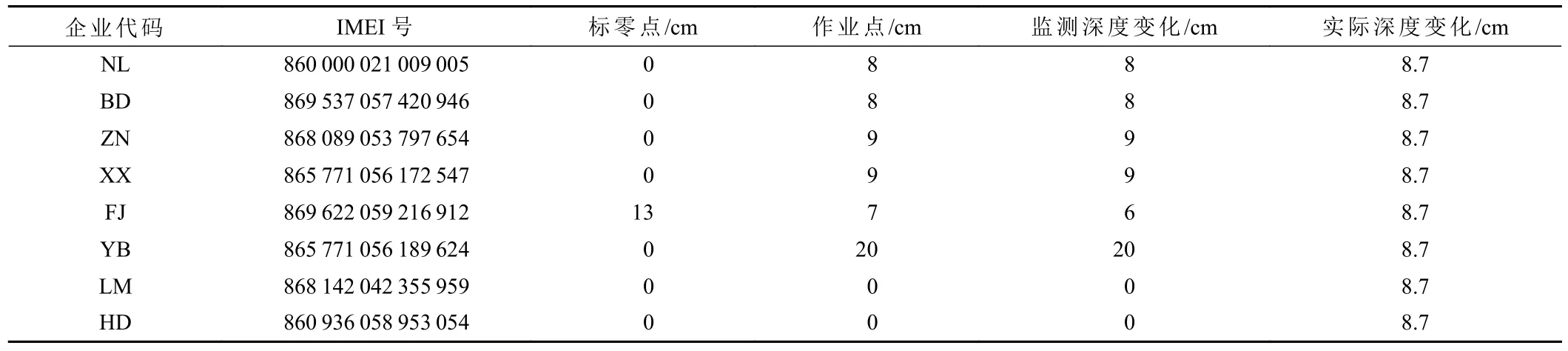
表8 静态深度试验数据Tab.8 Static depth test data
2.3.2 动态作业试验
由表9 和图3 可知,NL 和XX 作业状态识别准确,试验地块地头部分进行了区分,其余识别不准确但其中YB 试验地头进行了区分;作业轨迹平均偏移来看多数为0.8~1.5 m,HD 和YB 分别为1.794 和3.156 m,偏移较高;从面积差方面看半数面积误差集中在±3%以内,ZN、HD、YB 和LM 面积误差分别为4.06%、13.42%、35.6%和-47.76%;作业点上频率除HD 为5s/次外,均为2s/次。

图3 作业监测终端动态试验情况Fig.3 Dynamic test of operation monitoring terminal

表9 作业监测终端动态试验数据Tab.9 Dynamic test data of operation monitoring terminal
2.4 联合收割机作业试验
2.4.1 静态深度试验
试验农机初始RTK 标定数值如表10 所示。
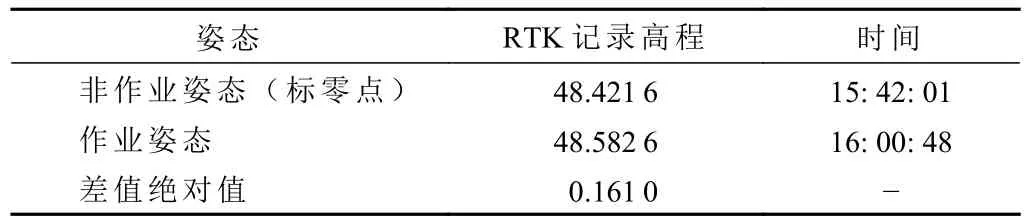
表10 收割机RTK 初始标定Tab.10 Initial calibration of harvester RTK
由表11 和图4 可知,NY、HD 标零点数据回传不准确或未标零,与实际高度有一定差距;BD 作业变化量相对准确;XX、YB 作业高度变化监测准确;ZN、FJ 与实际变化量差距过大;LM 终端未能有效监测到机具姿态的变化。

图4 联合收割机智能终端静态深度测试Fig.4 Static depth test of combine intelligent terminal

表11 静态深度试验数据Tab.11 Static depth test data单位:cm
2.4.2 动态作业试验
由表12 和图5 可知, NL、LM 和YB 作业状态识别准确,试验地块地头部分进行了区分,其余识别不准确,并且试验地头进行了区分;作业轨迹平均偏移半数为0.5~1.3 m,LM、HD、ZN 和FJ 轨迹平均偏移量分别为2.927、3.017、3.655 和17.681 m;半数面积误差集中在±3%以内,LM、HD、ZN 和FJ 面积误差分别为-11.43%、-16.77%、-23.57%和-24.54%;作业点上频率除HD 为5s/次外,均为2s/次。

图5 作业监测终端动态试验情况Fig.5 Dynamic test of operation monitoring terminal
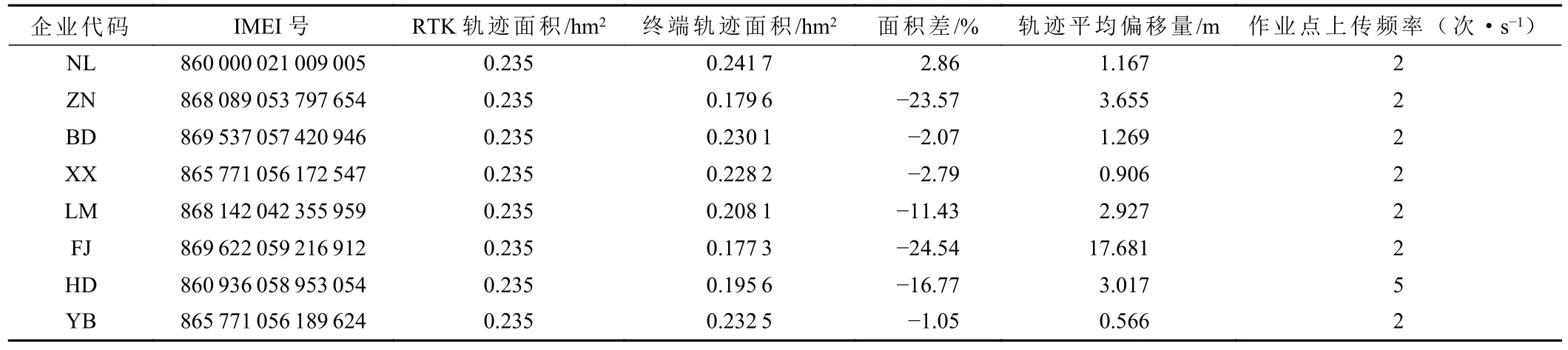
表12 作业监测终端动态试验数据Tab.12 Dynamic test data of operation monitoring terminal
3 结束语
静态CEP 试验,YB、XX 终端CEP50 和CEP95 最低,CEO50 为0.111、0.209,CEP95 为0.130、0.215;其余企业皆超过0.5。旋耕机静态深度试验,ZN、XX终端与实际差距最低,都为0.3 cm;其次为NL、BD终端,都为0.7 cm。收割机静态试验,XX、YB 终端与实际差距最低,都为0.1 cm,其次为NL、BD 终端,都为1.1 cm。旋耕机动态试验,轨迹偏移量由低到高前3 分别为LM、ZN 和XX 终端,为0.803、0.829 和0.842 m。收割机作业试验,轨迹偏移量由低到高前3分 别为YB、 XX 和NL 终 端, 为0.566、 0.906 和1.167 m。旋耕机作业面积差距前3 分别为FJ、BD 和XX 终端,为1.5%、2.07%和2.25%。收割机作业面积差距前3 分别为YB、BD 和XX 终端,为1.05%、2.07%和2.79%。
上述数据结论表明,相同大田试验环境中不同终端对于不同试验项目有不同的数据表现,实际应用中应根据使用需要,选择优势数据表现产品作为作业监测设备使用。由于参试终端样本局限性及科技水平不断发展造成研究有更深一步的可能性,从应用推广层面讨论,如何在复杂的农业环境中确保终端产品定位精准度、作业面积误差及数据传输的可靠性等是进一步重点研究方向。
