延迟线阳极光子计数成像探测器研究
2024-01-15张亚龙刘永安张蕊利杨向辉刘哲盛立志
张亚龙,刘永安,张蕊利,杨向辉,刘哲,盛立志
(1 中国科学院西安光学精密机械研究所 瞬态光学与光子技术国家重点实验室,西安 710119)
(2 中国科学院大学 光电学院,北京 100049)
0 引言
光子计数探测技术是一种极微弱光探测法,其探测的入射光的光功率在10-14W 以下,比探测器本身在自然条件下的噪声水平还低。利用入射光在极微弱条件下经过光子计数探测器输出电信号自然离散的特点,采用脉冲甄别技术将其输出的脉冲信号提取并数字化处理便可实现对光子探测的目的[1-2]。该探测技术在高分辨率的光谱测量、激光测距、荧光寿命成像及空间探测等领域中都有着广泛的应用[3-6]。
基于微通道板(Microchannel Plate,MCP)的位置灵敏阳极探测器具有时间响应快、结构紧凑等优点,该探测技术在实现光子计数的同时能确定出每个光子到达的时间信息和位置信息。目前,用于成像的位敏阳极主要有楔条型阳极(Wedge and Strip Anode,WSA)、延迟线阳极(Delay line Anode)、游标阳极(Vernier Anode)、交叉条纹阳极(Cross-strip Anode,XS)和多阳极微通道板阵列(multi-anode Microchannel Array,MAMA)等[7-12]。其中WSA 阳极的空间分辨能力随着探测面积增大会逐渐变差;MAMA 阳极的电子学设计会随探测面积增大而变得复杂;XS 阳极每个条带都需要一路独立的读出电子学,导致电路功耗变大;而延迟线阳极的空间分辨能力及电子学设计难度受探测面积的影响较小,故基于MCP 的延迟线位敏阳极在大面积成像探测中有着独特的优势。国外在该方面相关技术已经比较成熟[13],而国内对延迟线阳极探测器的研究相比国外还有一定的差距。中国科学院近代物理研究所对绕线式延迟线阳极探测器进行了相关研究[14-15],其探测器的平均位置分辨率优于200 μm,最优可达100 μm。使用缠绕在绝缘陶瓷支架上的金属丝作为延迟线使得阳极整体结构复杂、体积较大。中国科学院西安光学精密机械研究所研制了一种直接收集型延迟线阳极探测器[16-17],其阳极有效面积为23 mm×23 mm,探测器的空间分辨率最优可达92 μm,通过一系列焊盘与过孔实现电荷收集,导致了信号传输时间的不确定性,增大了数字化位置解码的误差。与传统的直接收集方式相比,电荷感应技术可以消除次级电子重新分布引起的分布噪声且使得阳极感应电子云团半径可控,同时为真空管壳的封装提供了条件,位置灵敏阳极位于管壳外部,便于测试。
阳极信号读出的方式包括传统的直接收集和电荷感应收集两种方式,目前国内关于延迟线阳极探测器的研究大多数采用传统的直接收集方式。本文以电荷感应技术为基础,对采用电荷感应层感应信号作为电荷收集的交叉延迟线阳极(Cross Delay line Anode,XDL)进行了研究。该阳极采用印刷电路板(Printed Circuit Board,PCB)加工制作,有效探测面积为50 mm×50 mm。搭建了探测器测试系统,完成了对延迟线阳极探测器相关性能的测试。
1 感应式XDL 阳极探测器设计
1.1 感应式XDL 探测器
基于MCP 的感应式XDL 探测器主要由输入窗、级联MCP、电荷感应层、位置灵敏阳极等组件构成,其结构示意如图1。当紫外波段的光透过输入窗照射在MCP 上,MCP 将光子转化为电子,通常单片MCP 的增益为104,当两片或三片MCP 级联时可将电子倍增输出包含约107个电子的电子云团。MCP 与电荷感应层之间施加电场使得电子云团加速向电荷感应层移动。由于电荷感应层高阻的特性,当电子云团到达电荷感应层时需要一定的时间才能扩散到地,故在另一侧会产生等量的感生电荷,位敏阳极感应到感生电荷并对其进行解析成像。而传统的直接收集方式易引起二次电子在阳极上的重新分布,导致输出图像的不稳定。电荷感应技术有效地避免了这些问题,消除了不均匀电子场对电子运动带来的影响。同时为真空封装探测器的研制提供了便利(即位置灵敏阳极可以位于管壳外部),不仅降低了器件工艺的制作难度,而且便于测试。

图1 感应式XDL 阳极探测器示意图Fig.1 Schematic diagram of detector with XDL anode
1.2 电荷感应层设计
电荷感应层为一侧镀有薄膜电阻层的基底电介质,未镀膜的一面靠近阳极侧。电荷到达电阻层通过基底电介质感应到阳极。关于电荷感应技术国内外均有报道[18]。研制中采用半导体Ge 作为电阻层,Al2O3陶瓷作为衬底电介质。电阻层与另一侧阳极可以等效为一个二维RC 网络,其等效结构如图2,图中Ri为方块电阻值,Ci为单位面积电容。
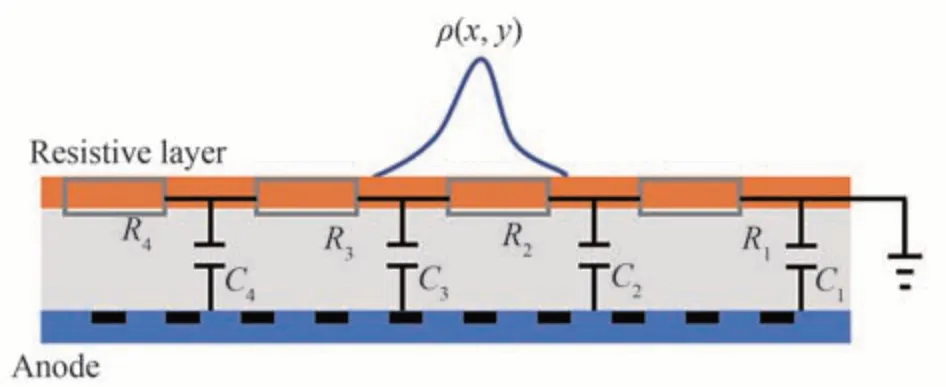
图2 电阻感应层等效电路图Fig.2 Equivalent circuit diagram of the resistive sensing layer
电子云被电荷感应层接收后发生扩散,其初始电荷随时间变化逐渐覆盖到更大的范围。若扩散时间太短,导致阳极上感应电荷较少,若扩散时间太长,则会造成信号脉冲堆积,影响探测器的空间分辨性能以及计数率。电子云在电阻层上扩散时其电荷密度分布可以表示为[19]
研究中模拟了当电子云团初始宽度、高阻Ge 膜表面电阻一定,不同陶瓷基底厚度下阳极电荷密度随电荷分布半径的变化,如图3。图中电荷量Q=1.6 pC,电荷初始宽度σ为0.5 mm,Ge 层的表面电阻为70 MΩ/square,可以看出随着陶瓷基底厚度的增加,电荷分布半径增大,电荷密度迅速减小。考虑到材料的强度以及延迟线阳极需要电子云大小能够覆盖2 个周期且感应到的电荷量不能过小,设计陶瓷基底厚度为1 mm,确保阳极收集信号的幅度以及成像性能达到最佳。

图3 不同基底厚度电子云团密度分布Fig.3 Density distribution of electronic cloud cluster with different substrate thickness
1.3 XDL 阳极
二维XDL 阳极原理如图4。以其中一维方向为例,感应电荷被XDL 阳极收集单元收集后产生的脉冲信号传输到下方延迟单元,随后向延迟线两端传输,通过计算延迟线两端的时间差,根据信号在延迟线中传输的时间差正比于入射光子的位置可以还原出位置的信息。一维延迟线只能获得信号的一维信息,同理即可得到另一维度的信息,即

图4 XDL 阳极位置分辨原理图Fig.4 Schematic of single photon detector based on XDL anode
式中,LX、LY分别为X方向和Y方向延迟线的等效长度,tXDL、tYDL为信号在延迟线中总延迟时间。由式(2)、(3)可知,XDL 阳极位置解码的误差主要由时间测量误差与传输速度产生。为提高位敏阳极的位置解析精度,实现高的空间分辨率,可考虑降低信号在延迟线中的实际传输速度,选用高介电常数的材料。另一方面可以提高时间测量误差的精度,其主要的影响因素包括定时电路的定时精度以及噪声、数字转化误差等。
为得到入射光子的二维位置信息,需要两组相互垂直不相交的延迟线,同时要求两组延迟线都能接收到信号。传统的XDL 阳极[21]结构采用刻蚀的方法使用Cu 材料在陶瓷基板上制作收集单元和延迟单元,从上到下结构依次为导体、绝缘体、导体、绝缘体。其中陶瓷作为信号之间的绝缘材料。而设计的新型XDL 阳极结构采用PCB 电路板制作,从上到下依次为上层收集单元、地平面、下层收集单元、地平面、上层延迟单元、地平面、下层延迟单元、地平面,收集单元与延迟单元之间由过孔连接。相比于传统的XDL 阳极,该设计将延迟单元放在了收集单元的背面,压缩了阳极的尺寸,另外采用PCB 制作在降低制造成本的同时,也提高了阳极的强度。
由于阳极设计采用的电荷收集方式为感应读出方式且设计的阳极为多层结构,则上层收集条和下层收集条之间的感应电荷量也略有不同,为保证两层收集条收集的电荷量接近一致,在设计中上下层的线宽也略有不同。设计中考虑到感应电荷的电子云能够覆盖阳极的两个周期且保证异层收集单元收集电荷量接近,上层收集条、下层收集条、阳极周期之间宽度之比为3∶4∶17。设计的阳极结构如图5。

图5 延迟线阳极结构Fig.5 Structure of delay line anode
2 实验系统
搭建的延迟线阳极探测器实验系统如图6。系统主要包括光源、探测器、电子学读出和上位机四部分,其中探测器位于真空腔室内,在真空度达到10-4Pa 后开始工作。高压电源给MCP 提供工作电压,单片MCP 在工作电压为800 V 的条件下,其增益约为104,研究中采用3 片MCP 堆叠的方式确保增益能够到达107。测试中当光源透过输入窗被探测器前端MCP 接收后,MCP 将接收到的光信号转换为电信号并进行倍增,经倍增后的电子云团被高阻感应层收集并感应到另一侧位敏阳极,感应信号最终由阳极输出端口输出。阳极输出信号通过真空腔体转接法兰将信号引出至电子学电路,经电子学电路处理后输出模拟定时信号。最后通过时间数字转换电路(Time-to-Digital Converter,TDC)将信号到达的模拟定时转化为数字信息,传输到上位机上,通过解码得到入射光子的二维信息实现成像。

图6 实验系统示意Fig.6 Schematic of experimental system
电子学读出系统主要由信号放大电路、定时甄别(Constant Fraction Timing,CFD)电路,以及时间数字转换电路(TDC)等组成。由于阳极输出的信号很微弱(mV 量级),输出信号首先需经过放大电路将信号进行适当放大以满足后续电路处理的需求。CFD 电路对输入的模拟信号判断,通过调整阈值去除噪声,甄别出光子事件,当检测到光子事件来临,CFD 便输出定时信号。TDC 对定时信号进行数字转换将模拟信息转化为数字信息。最终将数字化定时信息传递到上位机解码入射光子事件的位置信息。其信号处理流程如图7。

图7 延迟线阳极信号处理流程Fig.7 Schematic of the experiment to the XDL anode
3 结果与讨论
3.1 信号测试
XDL 阳极上输出的原始信号是一个具有快速下降沿的窄脉冲信号,如图8(a)。X、Y方向信号宽度都在10 ns 以内,X方向信号幅度约为40 mV,Y方向信号幅度约为30 mV,信号幅度接近但还存在差异,这是由于X、Y方向信号分别是由上层、下层收集单元感应产生的,其中下层相对于上层多了一层感应介质ε,需进一步优化下层收集单元参数以得到两个维度幅度相当的信号。

图8 信号甄别特性Fig.8 Signal discrimination characteristic
阳极输出信号在模拟电路中经过放大和定时甄别后输出定时信号,图8(b)为电子学输出的定时信号。信号的上升沿代表了一个光子事件的到达。在一次事件结束之前信号将有一定的保持时间,以防止信号引起的重复触发。在该事件完全结束后输出信号的下降沿。
3.2 暗计数测试
探测器的暗计数是指在没有光源输入的情况下,探测器输出的伪计数,是由于MCP 产生的,主要来自MCP 内部吸附的气体发生电离以及MCP 材料本身所含的原子在电场作用下发生电位迁移。通常,微通道板的暗计数率非常低(<1 counts/(cm2⋅s))。研究中进行了没有光源输入,探测器与电子学均正常工作时采集成像的测试,此时探测器输出的脉冲计数可视为暗计数,成像结果如图9。图中结果为MCP 工作电压为800 V,采集时间为5 min 的计数图像。MCP 有效尺寸为∅25 mm,单位面积内的计数率为0.23 count/s。

图9 暗计数测试Fig.9 Dark count test
3.3 空间分辨率测试
探测器的空间分辨率是评价其性能的重要指标。为测试探测器的空间分辨率,采用激光刻蚀的方式在不锈钢上刻蚀小孔掩膜板,小孔孔径为0.08 mm,孔间距为0.5 mm。将小孔掩膜板紧贴放置在MCP 输入面。受到光照的位置产生小孔,图10 中白色亮点为小孔成的像。从图中每一行(列)都可以得到对应小孔的光子计数分布图,从而对每个小孔的半高全宽值(Full Width at Half Maxima,FWHM)进行分析。从图10 中选出指定行(*)列(#)对探测器的空间分辨率进行分析,其光子计数密度分布如图11。

图10 小孔成像图Fig.10 Pinhole mask image

图11 空间分辨率分析结果Fig.11 Spatial resolution analysis results
图11(a)、(b)是图10 中指定行(*)/列(#)在X轴/Y轴对应的光子计数密度分布图。假定成像中小孔的质心位置不变,根据两小孔之间所占像素和即为小孔之间的间隔可计算出单个像素对应的尺寸。根据光子计数分布的半高全宽值FWHM 可得到Y方向的分辨率平均为150 μm,最优可达107 μm,X方向的分辨率平均为200 μm,最优可达149 μm。其中Y方向的空间分辨率略优于X方向,主要由于Y方向位置解码由下层延迟线得到,下层延迟线其等效传输速度较小,因而空间分辨率略高于X方向。
4 结论
位敏阳极收集电子包括传统的直接收集方式和采用电荷感应技术耦合读出两种方式。将电荷感应收集引入交叉延迟线位敏阳极,制备了基于PCB 工艺的延迟线位敏阳极。利用搭建的测试系统对感应式交叉延迟线阳极的性能进行了测试。结果表明探测器在MCP 正常工作电压下输出两个维度的原始信号不同,这是由于下层信号相对上层信号多了一层感应介质导致的。利用搭建的系统对研制的交叉延迟线阳极进行了成像测试,测试表明其空间分辨率最好可达107 μm。相比传统的延迟线阳极设计,基于PCB 制备的阳极具有强度高、制备成本低等优点。接下来的研究重点是进一步优化阳极电荷感应层,调整两个维度方向延迟线相关参数,从而更好地提高探测器的空间分辨能力。