基于DOE的爬壁机器人永磁吸附装置优化设计*
2024-01-12张春光刘佳慧刘嘉瑞杨煜兵
安 磊,张春光,刘佳慧,刘嘉瑞,杨煜兵
(1.国机传感科技有限公司,辽宁 沈阳 110043; 2. 沈阳仪表科学研究院有限公司,辽宁 沈阳 110043)
0 引 言
采用人工干喷砂或者手持高压喷枪对船舶进行除漆存在着高空作业危险、劳动强度大等弊端,而采用船舶的除漆爬壁机器人可以很好地避免此类安全隐患。因此,船舶除漆爬壁机器人的应用越来越广泛。永磁吸附装置是船舶除漆爬壁机器人的重要子系统,其安装在行走部减速机下部,并与船舶钢板壁面之间有一定气隙。有限的安装空间对永磁吸附装置提出了较高要求,要求其提供足够吸附力的同时又不能过大,即机器人能可靠地吸附在船舶壁面上的同时又要保证机器人运动灵活,这就需要提高永磁体的磁能利用率。因此,永磁体的排布及其结构参数的优化逐渐成为永磁吸附装置的研究重点。
笔者研制了一种采用永磁吸附和轮式行走相结合的船舶除漆爬壁机器人[1]。机器人利用永磁体与船舶钢板壁面产生的磁吸附力使其吸附在船体壁面上。永磁体磁极的排布基于Halbach阵列,相关研究成果参见文献[2]、[3]。此文中,笔者对永磁体的结构参数尺寸进行了优化设计,应用试验设计(DOE)方法,把永磁体的磁质比作为目标函数,通过有限元软件对其结构参数进行优化设计,此举大幅度提高了永磁体的磁能利用率。最后,通过爬壁机器人行走试验验证了永磁吸附装置结构参数优化设计的合理性。
1 爬壁机器人结构和力学模型
1.1 船舶除漆爬壁机器人结构
图1为船舶除漆爬壁机器人机械结构模型,主要由行走部、本体部、喷盘部组成。本体部位于机器人中间位置,连接行走部、喷盘部,本体部后面有2个万向轮组成的从动轮,从动轮之间有1块小永磁体,用于保持机器人平衡;行走部位于机器人两侧,实现机器人的行走和吸附;喷盘部位于本体部下方,内部含有喷嘴,通过喷射超高压水实现除漆。

图1 船舶除漆爬壁机器人机械结构
爬壁机器人行走部(不含皮带)如图2所示。主要包括伺服电机、减速机、永磁吸附装置、轮胎等。伺服电机和减速机安装在行走部中间,电机经过减速机输出轴驱动两个轮胎,实现机器人的行走;永磁吸附装置安装在减速机下方,其产生吸附力能确保机器人可靠吸附在壁面上。

图2 行走部结构 图3 永磁吸附装置结构
永磁吸附装置如图3所示,永磁吸附装置由永磁体、铝合金板等组成。永磁体有5块,形状为扇形,它们通过螺钉螺母安装在铝合金板上,铝合金板通过螺钉安装在减速机下方,永磁体与船舶钢板壁面有一定气隙,因此采用非接触式吸附方式。
1.2 爬壁机器人力学模型
爬壁机器人在船舶壁面上的主要采用行走方式,即不管机器人行进方向是向上还是向下,驱动轮始终处于上方。
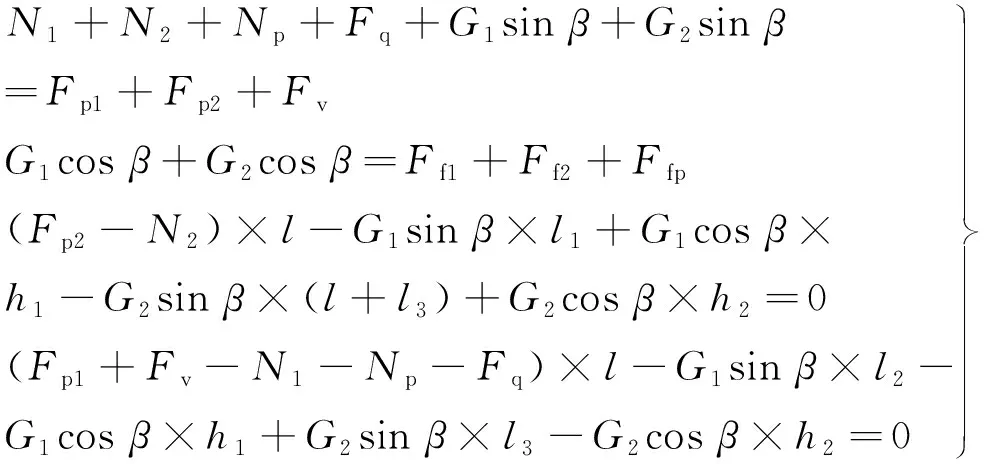
爬壁机器人在船舶壁面吸附时的力学模型如图4所示。边界条件包括:①爬壁机器人沿船舶壁面行走不发生下滑;②不绕A点倾覆;③不绕B点倾覆。基于以上边界条件,建立如下方程:
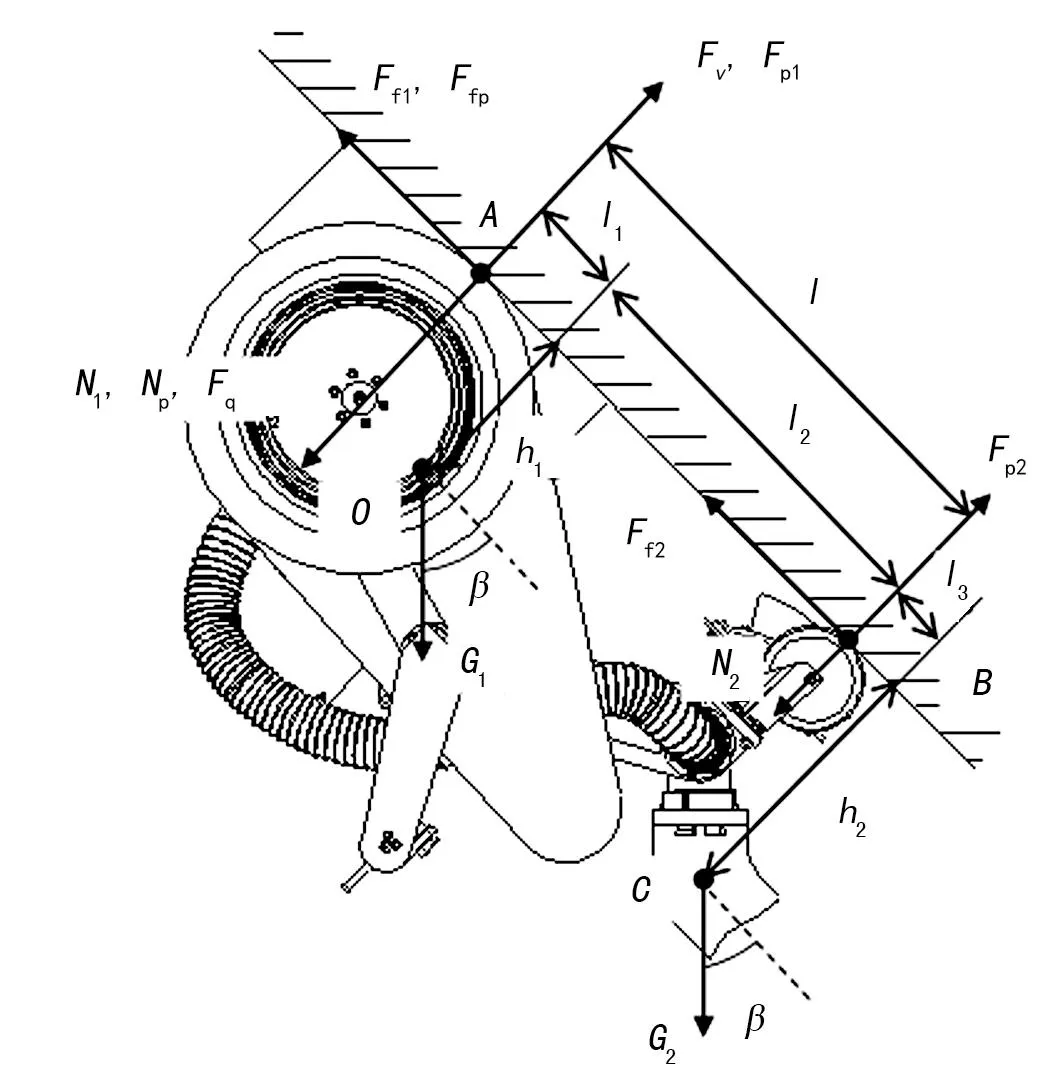
图4 爬壁机器人力学模型
(1)
式中:N1为轮胎处支持力;N2为万向轮处支持力;Fp1为轮胎处永磁吸附装置的吸附力;Fp2为小永磁体的吸附力;Ff1为轮胎处静摩擦力;Ff2为万向轮处静摩擦力;Fv为喷盘的真空吸附力;Np为喷盘处的支持力;Ffp为喷盘的静摩擦力;Fq为水射流反冲力;G1为爬壁机器人本体重量;G2为电缆、水管、废水等折算到爬壁机器人处的重量;β为壁面的倾角,0≤β≤90°。图中点A是轮胎与壁面的接触点,点B是万向轮与壁面的接触点,点O是爬壁机器人本体质心,点C是电缆、水管、废水等折算到爬壁机器人处的质心。l是点A与点B的距离,l1是点O与点A沿壁面方向的距离,l2是点O与点B沿壁面方向的距离,l3是点C与点B沿壁面方向的距离,h1是点O与壁面的距离,h2是点C与壁面的距离。喷盘中心与轮胎中心共线。小永磁体中心与万向轮安装板的中心共线。
(2)
(3)
式中:Q为水射流的流量;pq为水射流的压力;d为喷盘的直径;pv为喷盘内的压力。
关系式需满足如下约束条件:
(4)
式中:μ1、μ2、μp分别为轮胎、从动轮、喷盘与壁面之间的静摩擦系数。
将爬壁机器人对应数据代入式(1)~(4)中,求得Fp1≥5 400 N,Fp2≥800 N。由于每个行走部内含有一个永磁吸附装置,且每个轮胎受力情况一致,即每个轮胎处的永磁吸附装置的吸附力应达到2 700 N,万向轮处的小永磁体吸附力应达到800 N。文中以轮胎处永磁吸附装置的优化设计为研究重点。
2 永磁体结构参数优化
2.1 优化参数及约束条件
吸附力是船舶除漆爬壁机器人的一个重要参数,根据力学模型,推导出在极端工况下,爬壁机器人每组永磁吸附装置产生的吸附力不低于2 700 N。因为吸附力过大对于机器人灵活运动不利,故永磁吸附装置的吸附力也不能超过2 700 N过多。
当永磁体的材料、排布方式、气隙等条件确定的情况下,吸附力的大小主要受到永磁体结构尺寸的影响,且吸附力与永磁体的结构尺寸之间存在一定的耦合关系。在保证爬壁机器人可靠吸附的前提下,要使永磁吸附装置结构紧凑,应该减少其体积和质量,需要优化永磁体的结构参数。引入变量λ,在一定的工作气隙下永磁体的优化目标是:永磁吸附装置提供的吸附力与其质量比值(简称为磁质比[4,5])最大,其λ公式如下:
(5)
式中:Fp为永磁吸附装置在一定气隙下的吸附力,N;Gp为永磁吸附装置的质量,kg。
组成永磁吸附装置的5块永磁体为扇形尺寸相同,结构尺寸参数d={r,h,a,w},结构尺寸如图5所示。
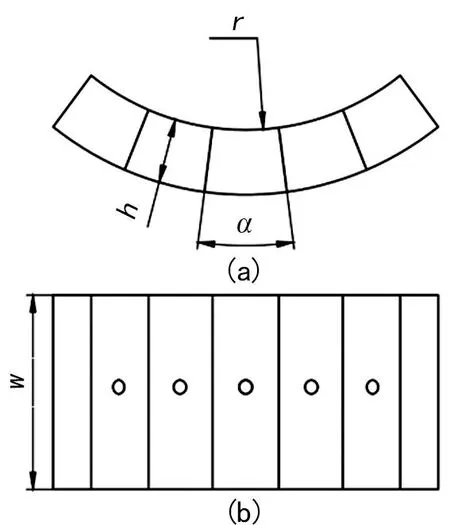
图5 永磁体的结构尺寸参数
以永磁体磁质比为目标函数,综合考虑爬壁机器人行走部空间结构、螺钉安装尺寸等限制条件,确定永磁吸附装置优化问题的数学模型为:
(6)
式中:Vp为永磁吸附装置的体积。
探索实验设计是根据输入参数的数目采集设计参数样本,计算每个样本的相应结果,利用二次差值函数构造设计空间的响应面。实验设计类型选用中心组合设计,设计类型选用自动定义。以永磁体的内径r、厚度h、夹角a、宽度w为设计变量,在三维软件中建立永磁吸附单元参数化模型,将r、h、a、w参数化并导入有限元软件中,在优化模块中根据数学模型设置4个变量r、h、a、w的范围以及目标函数,选取Screening筛选优化法提取变量r、h、a、w值,每一组r、h、a、w值对应一个永磁体模型,然后进行网格划分,求出对应的吸附力、质量,循环计算,直至找到最佳设计点。
2.2 优化结果分析
试验设计方法DOE(Design of experiment)[6]是用来拟合响应面的试验样本点的选取技术,常用的试验设计方法有CCD(Central Composite Design)、OSF(Optimal Space-Filling Design)、Box-Behnken Design、LHS(Latin Hypercube Sampling Design)等。由于永磁吸附装置优化设计的样本维数低,同时对响应面精度要求高,角点附近也可能有样本点,因此最终选择CCD方法。
试验样本点的选取通过DOE缺省的中心复合设计方法(CCD)得到25组设计点,具体参数值如表1所列。

表1 设计点参数值
目标驱动优化选用基于响应面的优化,优化算法选用Screening方法。Screening方法是一种非迭代直接采样方法,更适合于初步设计,得到近似的优化解,还可以用于离散变量优化。因为样本数量越多,优化结果越精确,同时考虑计算时间,确定样本数量为1 000,通过目标驱动优化后产生3组候选的优化设计点,如表2所列。

表2 优化设计点
分析表2所列3个优化设计点,综合考虑磁质比、行走轮胎、减速机等空间限制因素,设计点1为最优解。由于设计点1中参数在工艺上难以实现,需要对其结构尺寸参数圆整,并重新计算其吸附力、磁质比等,优化后与优化前的设计方案中参数对比如表3所列。
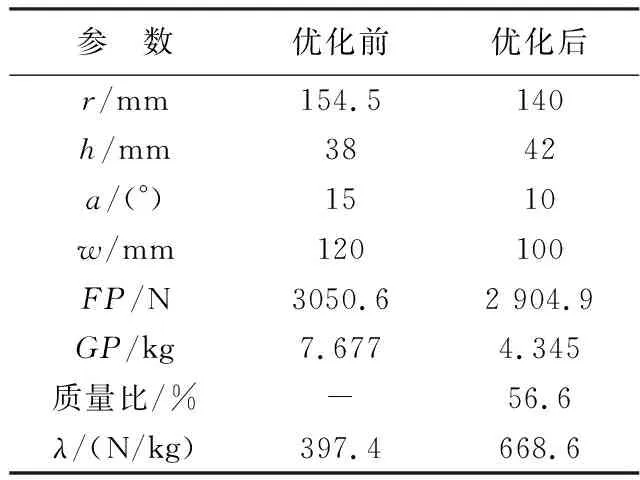
表3 原设计方案与优化后的方案对比
由表3可以看出,优化后的方案吸附力数值相比优化前下降4.8%,满足可靠吸附所需大于2 700 N的设计要求,且有一定裕度;优化后的方案永磁体质量仅为优化前56.6%,爬壁机器人零部件布局有大幅度改善,同时提高了机器人运动的灵活性以及负载能力;表征磁能利用率的磁质比λ大幅度增加。由此可见,相比优化前,优化后的方案在保证爬壁机器人可靠吸附的前提下,零部件的布局更加合理,质量大幅度降低,永磁体的磁能利用率大幅度增加,提高了运动的灵活性和负载能力,显著降低了永磁体的成本。
3 爬壁机器人行走试验
爬壁机器人运动性能试验主要包括竖直行走、水平行走、跨越焊缝、转向等实验项目,按照真实工作环境制造试验墙,并在试验墙上按标准预留焊缝。爬壁机器人竖直、水平、跨越焊缝、转向、在弧形壁面上的行走和带水(最大压力250 MPa)除漆工况下的试验如图6所示。试验结果表明,优化设计后的永磁吸附装置可以保证爬壁机器人可靠吸附于钢铁壁面,同时实现灵活运动。

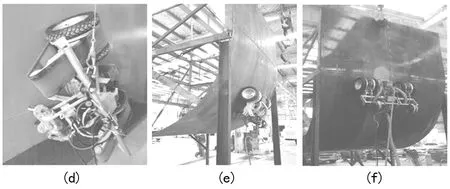
图6 爬壁机器人行走性能实验
4 结 语
文章以船舶除漆爬壁机器人的永磁吸附装置为研究对象,通过爬壁机器人力学模型得出可靠吸附所需的吸附力。以永磁体的磁质比为目标函数,确定永磁吸附装置优化问题的数学模型,基于试验设计方法,通过有限元软件对永磁体的结构参数进行了优化,大幅度提高了永磁体的磁能利用率。行走试验验证了优化设计后的永磁吸附装置在保证爬壁机器人可靠吸附于钢铁壁面的同时,可实现灵活运动。
