变量播种施肥控制系统的研究
--基于财务会计精细化
2024-01-11李乐
李 乐
(河南工业职业技术学院,河南 南阳 473000)
0 引言
会计精细化重点在于“精”和“益”。其中,“精”是把财会工作细致入微,通过严格的流程、规范和绩效考核方法,实现流程化的工作细化,提供工作执行力;“益”就是效益,也就是通过会计精细化的实施,实现企业价值各个环节成本最小化和价值最大化。为此,将会计精细化方法应用到农业播种施肥中,通过精确计量播种量、株行距和深度,最大程度地节省种子和化肥,实现农作物的产量最大化。
1 变量播种施肥控制系统总体设计
1.1 变量播种施肥控制系统整体结构
变量播种施肥控制系统主要由GPS接收机、排种与排肥检测模块、种箱与肥箱质量传感器、数据采集模块、电机控制模块和霍尔测速模块组成。播种施肥机整体结构如图1所示。安装在播种施肥机上的车载工控机、GPS、传感反馈装置和精准施播装置通过车载信号处理模块和车载计算机连接起来,用于数据信号的传输。在播种和施肥的管道上,各自装有压力和电容传感器,用于实时检测播种和施肥量;然后,将后台计算结果和期望的施播量进行对比,计算出即时的误差,再根据机器行走速度调整施播装置的转速,控制电机实现变量施播。
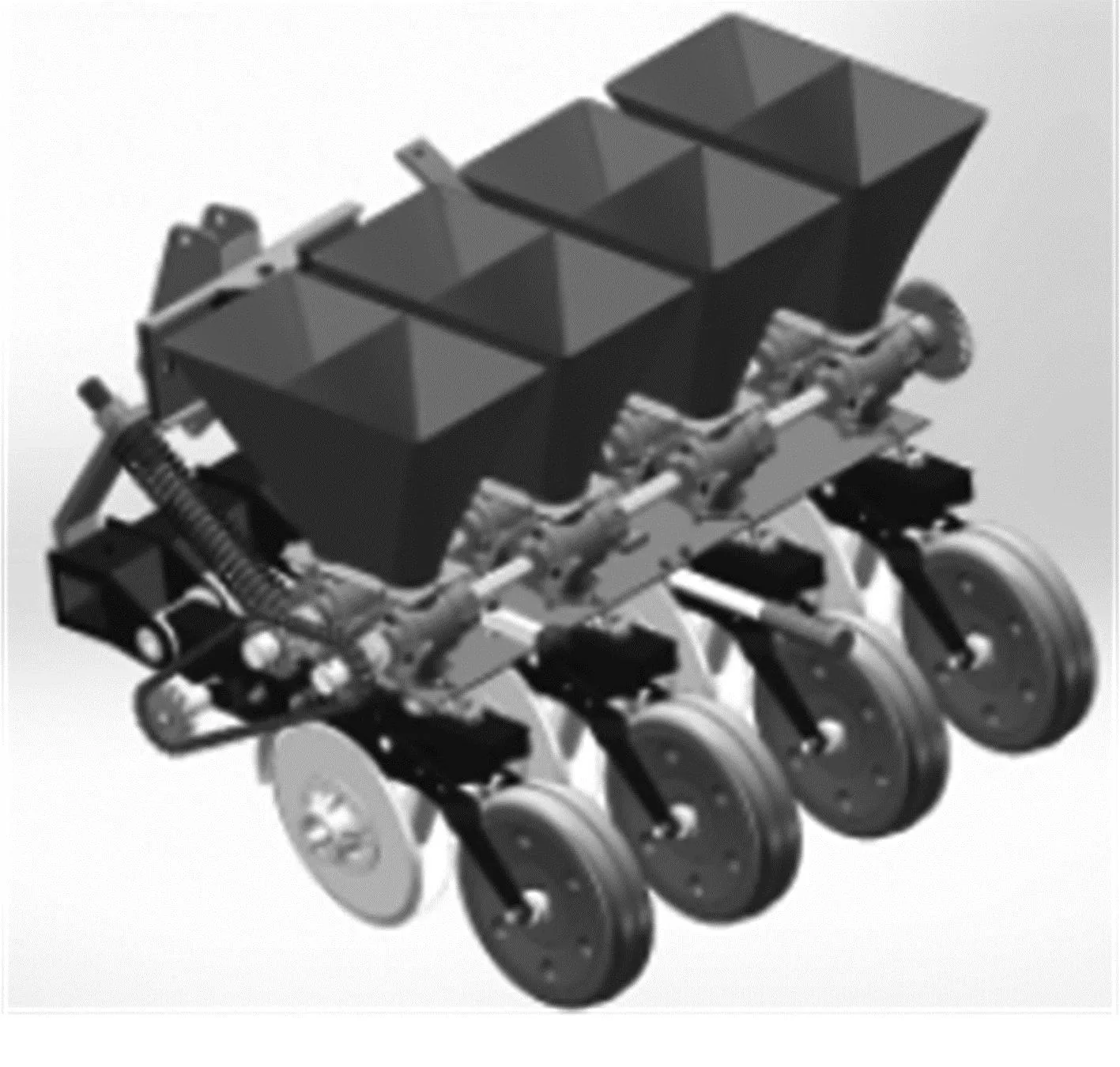
图1 播种施肥机整体结构图Fig.1 The overall structure diagram of sowing and fertilizing machine
1.2 播种量的计算
本文采用控制型的排种器,槽轮齿轮数为24个,齿槽圆弧半径分别为48mm和3mm,齿根半径为42mm。齿槽截面示意如图2所示。

图2 齿槽截面示意图Fig.2 The schematic diagram of cogging section
图2中,齿槽的截面积A由A1(槽形面积)、A2(梯形面积)和A3(弓形面积)3块面积组成,其计算公式为
(1)
A2=(a+b)×h/2
(2)
(3)
A=A1+A2+A3
(4)
其中,r1和r2分别为齿槽底部圆弧半径和齿轮底部到排种轴心的距离;θ1和θ2分别为齿槽底部圆弧弧度和齿轮顶端和轴心的夹角角度。
设定排种器全长槽轮每次排出的种子质量为q,则q包括槽内排出种子q内和槽外带出种子q外,即
q=q内+q外
(5)
槽内排出的谷物质量为
q内=α×A1×L×m
(6)
其中,α为谷物充满排种器齿槽的程度,一般取α=0.85;L为排种器槽轮长度,L=42mm;m为谷物种子体积质量,播种采用小麦作为对象,取m=0.78kg/L。
q外=m×v
(7)
其中,v为槽外带出种子的体积,可以根据槽外带出种子的圆弧半径和齿槽底部圆弧半径求出。
1.3 施肥量的计算
在农田进行施肥播种时,容易受到排量预设值、机器行进速度和实际排量相互影响,从而使施肥不均匀。为了保证施肥过程的均匀化,提高农作物产量,需要对各个影响因子进行研究,实现施肥过程中的精准化。外槽轮排肥器结构如图3所示。
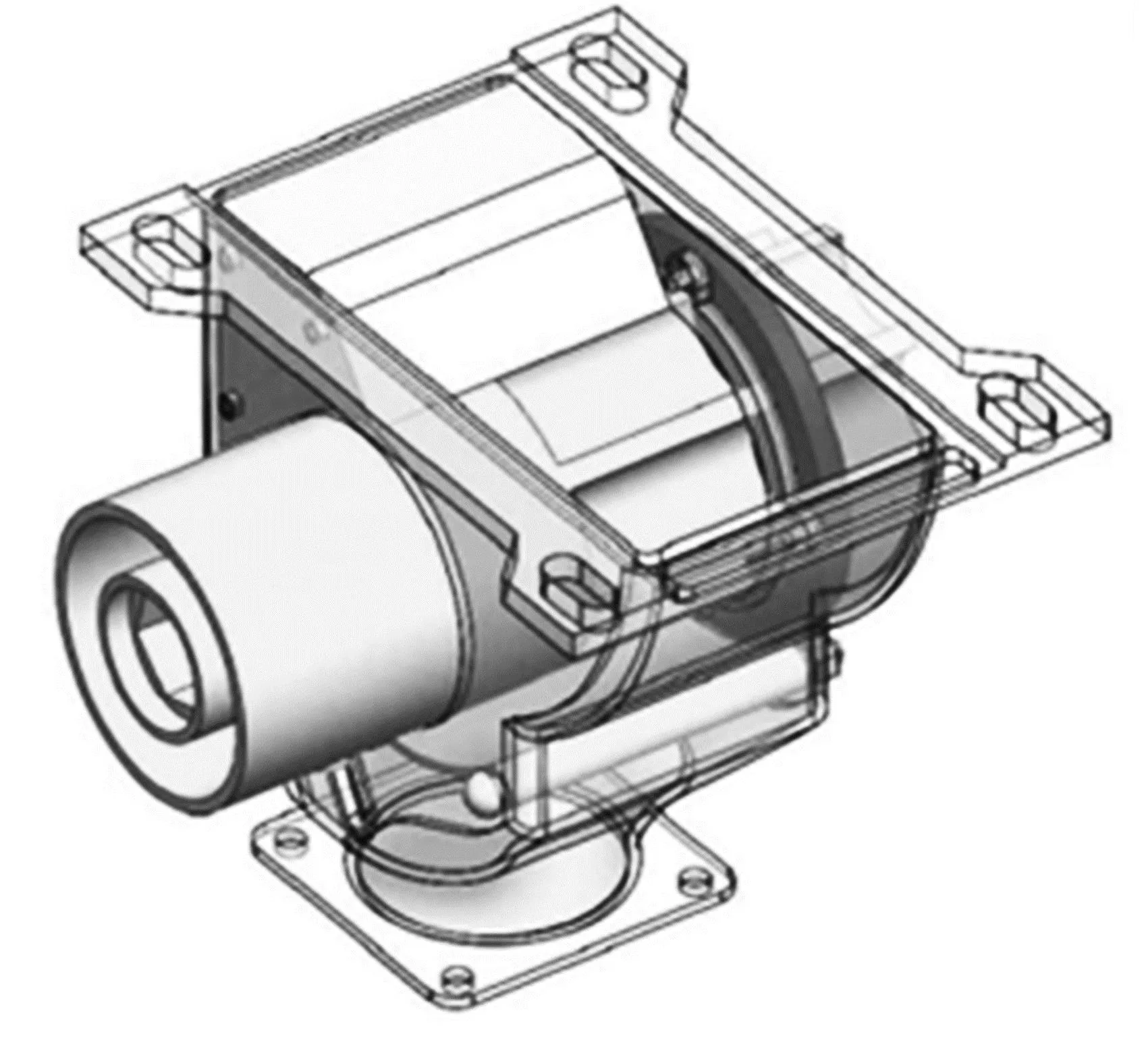
图3 外槽轮排肥器结构示意图Fig.3 The structure diagram of external groove wheel fertilizer ejector
播种施肥机每公顷的施肥量为
(8)
化简后为
(9)
其中,Q、q、v、B和N分别为每公顷施肥量(kg/hm2)、单施肥器施肥单位(g/min)、机器前进速度km/h、施肥作业行距和播种器个数。
播种施肥机排肥器是被直流电机驱动作业的,如果忽略施肥轴转速的非线性增加,只考虑其与速度之间的线性关系,则单个施肥器和排肥转轴的关系为
q=kn
(10)
其中,k和n分别为标定的直线斜率和施肥转轴转速(r/min)。
联立式(9)和式(10)可得
(11)
直流电机的工作是通过脉冲信号控制的,其表达式为
(12)
其中,f、x和T分别为脉冲频率、细分系数和固有步距角。
由式(11)、式(12)可知:在播种施肥机作业过程中,可以根据各个参数关系,利用各个传感器模块采集机器运行情况,了解直流电机转速和驱动脉冲频率,以实现对施肥量的动态调节,从而提高农作物的产量。
2 变量播种施肥作业流程设计
变量播种施肥作业流程如图4所示。工作时,播种施肥机在农用拖拉机的牵引下到达指定作业区域,先开启电源,完成车载工控机的初始化;然后,工控机经过网络获取当前作业农田的播种和施肥处方数据,并导入到MySQL数据库中;车载工控机内部搭载变量播种施肥控制程序,通过获取采集传感器获取的位置、车速、直流电机转速和外槽轮的开度信息,计算出当前的播种率和施肥量,并根据播种施肥模型计算变差量,再通过CAN总线将调节指令发送给控制模块,实现播种和施肥的变量控制。
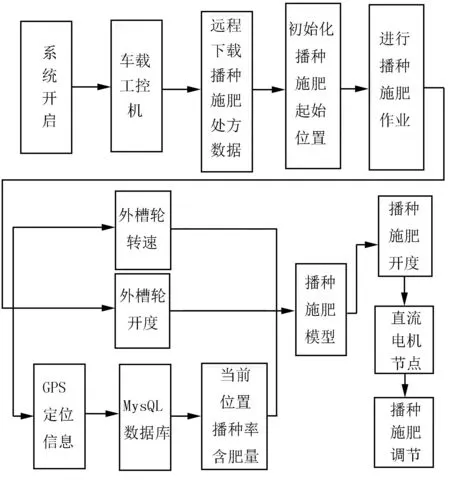
图4 变量播种施肥作业流程图Fig.4 The flow chart of variable seeding and fertilization
3 电机变速控制系统设计
3.1 建立PID控制模型
播种施肥的变量控制实际上是通过对直流电机的转速控制实现的,为了提高电机转速控制精度,采用PID模糊控制方法对排种和排肥器进行转速控制。PID是一种被广泛使用的控制技术,其表达式为

(13)
其中,e(t)为实际控制偏差;Kp、Ki和Kd分别为PID控制器的比例、积分和微分系数。
为了对PID的控制参数进行有效优化,采用时间误差乘积的绝对值(Integrated Time Absolute Error,ITAE)对PID性能进行评价。ITAE的指标计算表达式为

(14)
采用MatLab7.0/SIMULINK,建立PID的控制模型,如图5所示。
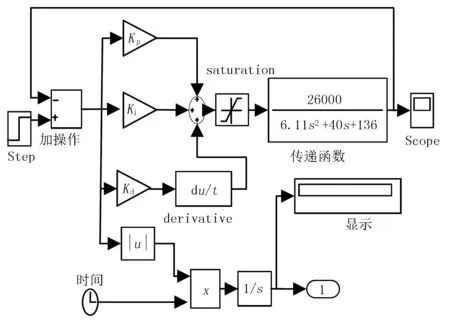
图5 PID的SIMULINK控制模型Fig.5 SIMULINK control model of PID
3.2 电机变速控制系统软件设计
播种施肥控制系统软件主要是用于驱动硬件平台去工作,从而实现对播种机的排种和排肥控制。播种施肥控制系统软件流程如图6所示。
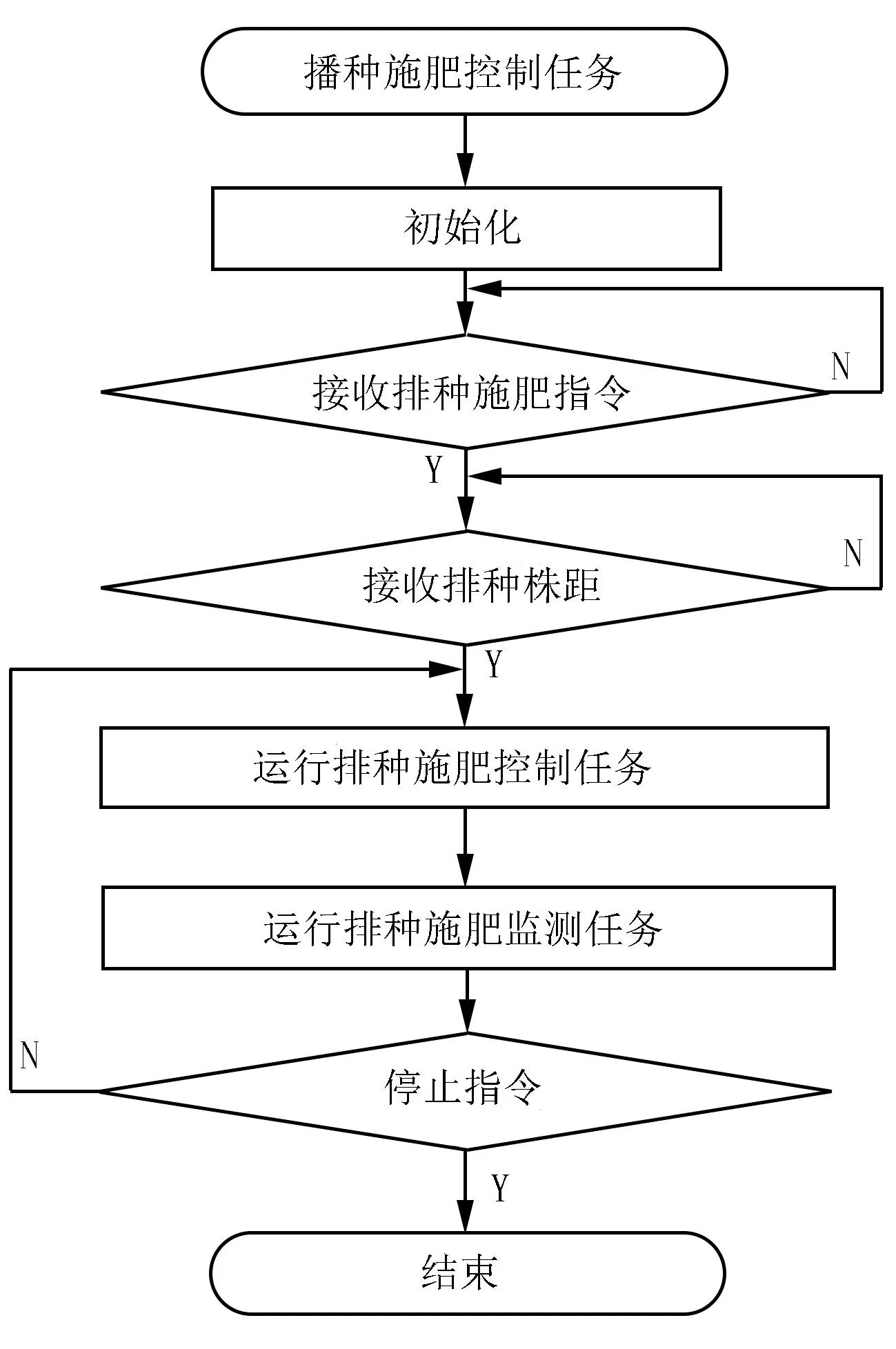
图6 播种施肥控制系统软件流程图Fig.6 The software flow chart of sowing and fertilization control system
播种施肥机在开始工作后,先进行一系列的初始化操作,如复位与时钟配置、内存初始化、flash初始化、以太网芯片初始化和GPIO初始化等操作,还需完成串口、Timer、传感器和PWM的初始化设置;然后,系统会交替地运行排种和排肥监测;最后,如果系统收到播种施肥结束的指令,会退出工作状态。
实现播种施肥的变量控制,其核心是利用PID调整PWM输出脉冲。控制流程如图7所示。
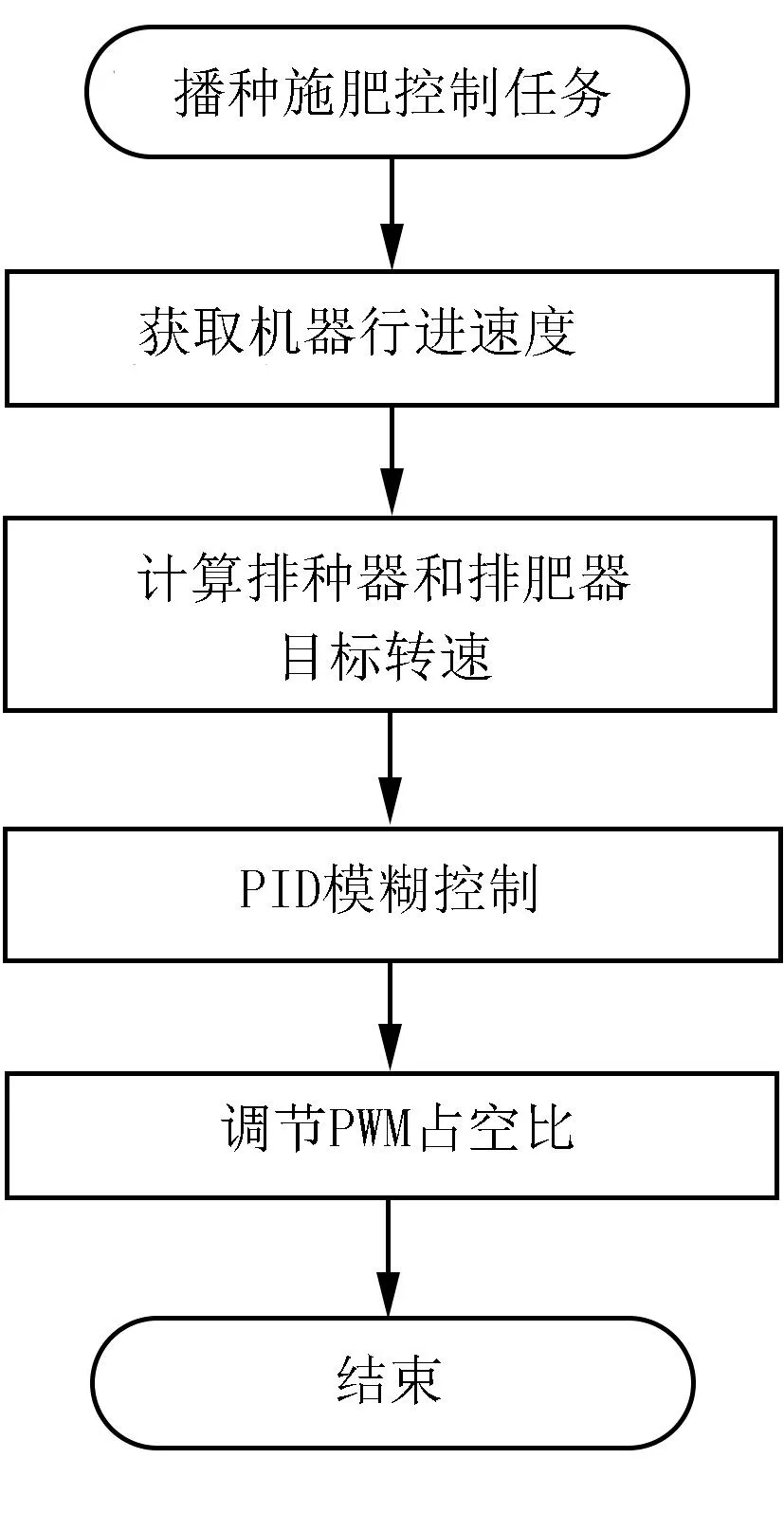
图7 PWM控制流程图Fig.7 The flow chart of PWM control
4 实验结果与分析
为了验证本文研究的基于财务会计精细化的变量播种施肥控制系统的可靠性,特将车载工控机、直流电机驱动器、各类传感器模块安装在播种施肥机上,分别基于1、2、3的输入条件,在4.2 km/h和5.0 km/h的前进速度下进行了电机播种输出轴的转速控制。电机实测转速和理论转速结果如表1所示。
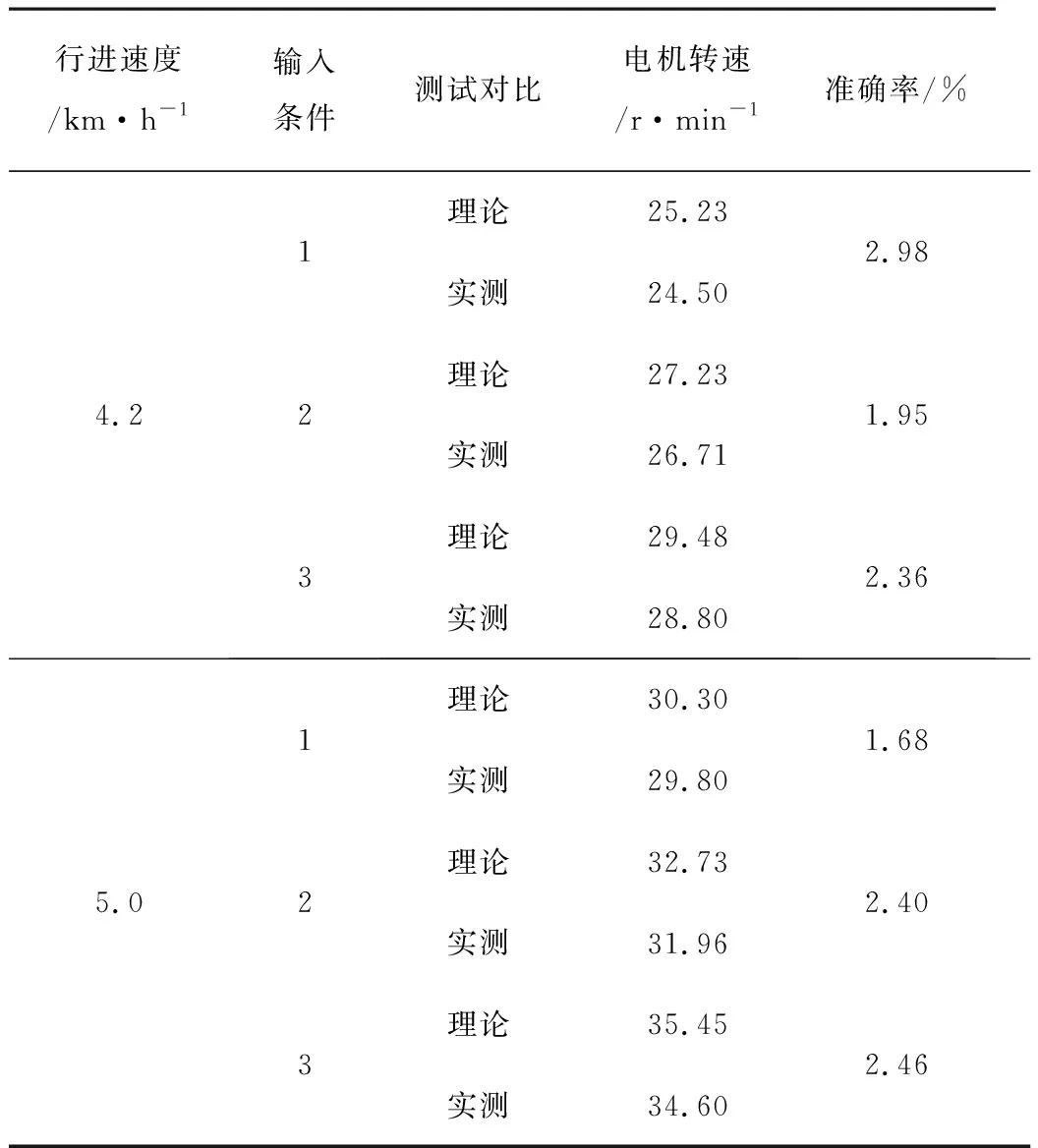
表1 实验测试数据Table 1 The experimental test data
经过多次的实验测试发现:在播种过程中所测得的播种转轴电机的转速和理论值误差在1%~3%之间,精度较高,实现了通过PID模糊控制对直流电机的变速控制,达到了变量播种的目的。
5 结论
为了实现对农业播种施肥的精准控制,运用会计精细化方法的思路,采用PID模糊控制技术,设计了一套变量播种施肥控制系统,可以通过对播种施肥部件的控制实现变量的施肥和播种。在实际播种试验中,所测得的播种转轴电机的转速和理论值误差在1%~3%之间,精度较高,实现了通过PID模糊控制对直流电机的变速控制,达到了变量播种的目的。
