一种面向对象方法的智能采棉机控制研究
2024-01-09丁玉涛
丁玉涛
(河南职业技术学院,郑州 450046)
0 引言
采棉机是一种大型棉花收获机械,能够有效提升采棉过程的自动化水平。作业过程中,受棉花生长状态限制,采棉机经常出现采收效果不理想的现象,如果能够根据棉花生长状态进行采摘作业速度的实时调整,则对提高采棉机工作效率和安全性具有重要意义[1-2]。
棉田环境复杂,采摘过程存在较多的非线性和时变性因素,为了保证采摘作业效率和采摘过程安全性,需要根据采摘对象实时调整控制参数,适应环境中的不确定因素[3]。为此,基于面向对象技术,以FPGA硬件为基础平台,设计一种模糊PID控制器进行采棉机作业速度实时控制,并对采棉机作业速度进行优化,旨在为采棉机的高效安全作业奠定基础。
1 采棉机作业速度控制调节原理
图1所示为采棉机作业速度控制原理图。工作时,输棉管路上的近红外流量传感器对管路中的棉花流量数据进行采集,根据流量与质量参数模型获取采摘过程中棉花实时产量;当遇到棉花堵塞输棉管路状态时,基于模糊控制器输出控制电流,经伺服放大器进行功率放大,驱动执行机构状态变化,从而改变液压泵流量,实现作业速度的自动调节[4]。
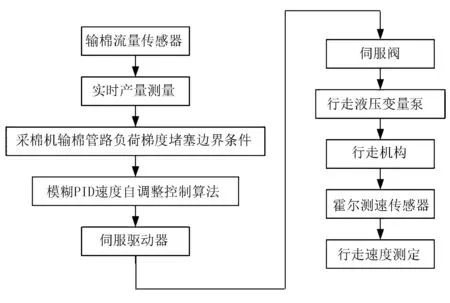
图1 采棉机作业速度控制原理图Fig.1 Schematic diagram of operation speed control of cotton picker
采棉机工作过程中,假设管路中的平均棉花流量为Mr,管路中的允许最大棉花流量为Mmax,传感器电流梯度为Δi,采棉作业行进过程中当前速度对应的伺服驱动电流为Ir,下一时刻伺服驱动电流为Inext,伺服驱动允许最大电流为Imax,则可得出采棉过程中输棉管路负荷梯度为
采棉过程中输棉管路堵塞边界条件为
|Inext|≤Imax
其中,k1、k2、k3以及k4均为正数,且满足k1≥k2≥k3。
2 采棉机作业速度控制器设计
采棉机工作过程,由于棉花的生长状态和采摘过程中环境因素影响,作业速度控制过程存在较大的波动[5-6]。因此,通过对采棉机作业速度调节原理进行分析,保证采棉机能够在不同的环境采摘作业过程中进行自适应调整。
采棉机作业过程中,行驶速度控制器结构原理如图2所示。其中,控制器对采棉机伺服驱动器、伺服阀、变量泵以及行走机构进行控制,保证采棉作业过程中输棉管路不发生堵塞。棉花流量传感器对输棉管路内的棉花流量数据进行实时采集,并转化为棉花实时产量,经过输棉管路堵塞边界条件进行转化,从而得出最佳的行走驱动控制电流,作为控制器的输入信号[7-8]。

图2 采棉机行驶速度控制器结构原理Fig.2 Structural principle of traveling speed controller of cotton picker

将采棉机输棉管路中棉花流量在堵塞条件模型中进行转化,获取最优化行驶速度驱动电流,作为控制器的输入参数设定值,霍尔传感器采集到的行进速度传感电流与设定驱动电流之间的偏差值和偏差变化率为控制器PID模块输入变量,控制器输出语言变量设定为Kp、Ki、Kd。因此,可以得出控制参数自整定公式为
其中,kp0、ki0、kd0为控制器初始设计值;Δkp(k)、Δki(k)、Δkd(k)为控制器输出值。
采棉机行驶速度控制器对控制参数进行修正,确保被控制对象的过程稳定性[13]。当采棉机启动时,设定采棉初始作业速度,利用流量传感器对输棉管路中的流量进行检测,转化为棉花产量。同时,结合堵塞边界条件模型转化最优行驶速度驱动电流,经控制器进行分析调节,生成采棉机作业行驶速度最优化驱动电流[14]。图3为采棉机行驶速度控制算法流程图。

图3 采棉机行驶速度控制算法流程图Fig.3 Flow chart of traveling speed control algorithm of cotton picker
3 控制系统仿真试验
为验证采棉机行驶速度控制器设计合理性,在Simulink仿真环境中设计仿真模型,对控制系统进行模糊仿真。采棉机行驶速度面向对象传输控制模型可表示为
当霍尔传感器对采棉机行驶速度的采样周期为1ms时,仿真输出信号幅值设定为1,由此得出控制器输出响应方波信号和误差信号曲线如图4所示,控制器输出响应误差信号曲线如图5所示。
由仿真结果曲线可以看出:采棉机作业行驶速度能够进行自适应调整,控制区输出超调量较小,同时能够在较短的时间内进行速度调节,具有良好的动态响应特性,控制系统运行特性稳定;控制器能够面向对象进行参数自适应调整,适合用于复杂环境中采棉机作业行驶速度控制和调节。
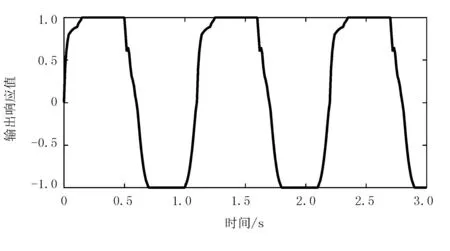
图4 控制器输出响应方波信号曲线Fig.4 Controller output response square wave signal

图5 控制器输出响应误差信号曲线Fig.5 Controller output response error signal curve
4 田间试验结果分析
为了验证采棉机控制系统的运行可靠性,选择1000m2棉田进行试验,分别在不同作业行进速度下进行棉花采摘,并记录统计数据。输棉流量与行走时间关系曲线如图6所示,采棉机输棉管道内流量与行进速度关系曲线如图7所示。
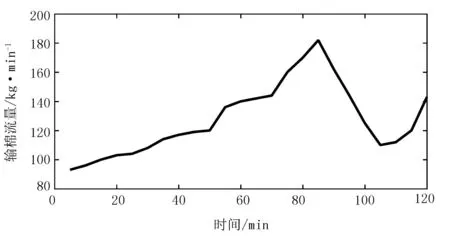
图6 输棉流量与行走时间关系曲线Fig.6 Relationship curve between cotton conveying flow and walking time
由图6可以看出:采棉机的初始行驶速度为5.6km/h,在前5min的输棉流量约为93kg/min,负荷堵塞条件最佳流量为100kg/min,此时可适当提高采棉机行进速度;当采棉机行进速度提升到5.6km/h时,理想流量为120kg/min,此时实际输棉管道流量为120kg/min,采棉机可保持当前行进速度。

图7 输棉流量与采棉机行进速度关系曲线Fig.7 Relationship curve between cotton conveying flow and traveling speed of cotton picker
5 结论
对面向采棉机作业过程输棉管路堵塞情况进行采棉行进速度控制,能够有效提高采棉机的作业适应性,同时减少采棉机作业过程中输棉管路堵塞现象的发生,对采棉机的智能化控制系统提升和改进具有重要意义。
