深海作业机器人电动系缆管理系统及其控制研究
2024-01-09杜凯冰刘浩平田招招秦建辉
杜凯冰,刘浩平,田招招,彭 勃,秦建辉
(1. 株洲中车时代电气股份有限公司,湖南 株洲 412001;2. 英国SMD 公司,纽卡斯尔 NE28 6UZ)
0 引言
海洋中蕴藏着丰富的资源,合理开发与利用海洋资源有助于人类社会可持续发展。水下机器人在帮助人类进行地质勘探、资源开发以及海洋管道与线缆铺设等方面发挥着重要作用。当前,各种功率等级的作业型深海机器人广泛应用在深海油气资源开发、水下探测与设备维护等领域[1-3]。有缆遥控作业机器人(remotely operated vehicle, ROV)是当前常用的深海作业机器人,其通过缆与工作母船连接,工作人员可在工作母船上对其进行操作控制。
缆是连接水面作业平台与水下作业ROV 之间的重要纽带,其主要传送电能、控制指令和传感器数据等,在深海作业ROV系统中发挥着重要作用[4-6]。ROV在海洋作业时会受到海流等复杂海洋环境的影响,作业环境较为恶劣, 导致缆在工作过程中受到复杂载荷环境作用[7-8]。系缆收放技术是深海有缆机器人的关键技术之一[9-12],可以减小水面作业船对ROV 运动的影响,调控ROV 在水下运动范围,确保系缆能正确地绕组并避免系缆的缠结。因此,利用系缆管理系统合理规划设计系缆的收放,对于提高ROV系统的工作效率与稳定性起着重要作用。
本文基于作业级ROV载体,研究设计一种水下有缆遥控机器人电动系缆管理系统。该系统以永磁电机作为动力执行单元;并设计了水面-水下控制系统及系缆收放控制方法,对处在滚筒不同层数系缆的力矩与速度做了动态控制,使滚筒内层的缆不会产生过大的张力,实现低张力缠绕。通过将电动系缆管理系统(tether management system,TMS)与实物ROV 配合进行功能实验,验证了该系统能很好地满足产品应用要求。
1 深海作业ROV系统
整个深海机器人作业系统包括控制舱、布放装置、ROV 与TMS。图1 所示为深海作业机器人ROV-TMS系统示意图,作业船舶上有控制舱、布放装置,工作人员在船上的控制舱内操作,相关操作以控制指令形式通过缆传送到水下ROV,从而实现在水面控制水下ROV运动的目的。

图1 深海作业ROV-TMS 系统示意Fig.1 Working-class ROV-TMS system
ROV 与TMS 在水下工作,其中ROV 是具体的执行单元,其可以携带机械臂等其他辅助工作单元,根据操作者的操作指令完成海洋作业[4]。
TMS用于管理ROV的系缆联结,确保系缆的正确绕组并避免缠结。TMS 使ROV 运动更具机动性,并可以在不移动船只或其他平台的情况下增加ROV 运动范围。
2 电动系缆管理系统
本文研究的电动TMS是用于ROV系统的新一代系缆管理系统,与传统的以液压系统作为动力执行单元的TMS 不同,该系统以永磁电机作为动力执行单元。
图2 为该系缆管理系统原理图,其由滚筒、滑动轮、水平往复绞线器、电机与驱动器、电源、控制器等组成。驱动器内置在与永磁电机相连的充油外壳中,将驱动器靠近电机布置可最大限度地减小信号传输干扰/延迟。

图2 电动TMS 原理Fig.2 Principle of the electric tether management system
滚筒直接由电机驱动,滑动轮也由电机驱动。滚筒通过链传动控制水平往复绞线器运动来确保滚筒与绞线器的运动是同步的。TMS控制系统通过调控滚筒电机与滑动轮电机的协同运动,使ROV适应复杂多变的海洋环境与系缆频繁收放的张力调节。电动TMS具体参数详见表1。

表1 电动TMS 参数Tab.1 Parameters of the electric tether management system
滚筒的驱动力矩和速度一方面受到电机性能的影响,另一方面也受到系缆在滚筒上所处层数的限制,这样可以避免系缆在滚筒上产生过大的扭矩/张力。因此,在电机功率范围内,处在滚筒内层的系缆将比外层系缆以更大的速度运动。
3 电动TMS控制系统
3.1 控制原理
图3 为电动TMS 的控制系统,其主要由水面控制系统与水下控制系统两部分组成。水面控制系统位于控制箱内。其由PLC 及相关控制系统组成,主要有人机界面操作功能、水下图形场景显示功能等。PLC控制系统基于Ethernet 与水下运动控制器通信,接收用户的操作命令(遥控指令、控制信号、参数配置等)并通过系缆传送到水下运动控制器;与此同时,水下运动控制器将各电机的状态、传感器信号及自身状态等信息通过系缆回传给水面PLC控制系统。
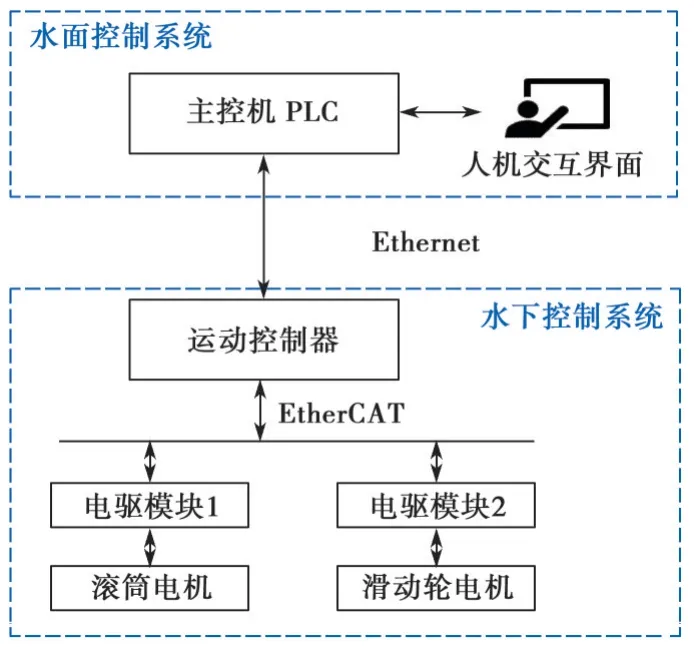
图3 电动TMS 水面-水下控制系统Fig.3 The surface-underwater control system for the electric TMS
水下运动控制器根据当前控制周期的指令设定值与来自传感器的实际反馈值,计算出各控制电机的目标电流(或力矩),并发出新的控制指令到各电机控制器,其详细控制逻辑见图4。在获取来自水面传递下来的TMS 工况和手柄级位信息后,滚筒控制指令计算单元判断系缆当前所处滚筒层数并确定对应的转矩/速度限制,根据受控滚筒与受控电机参数计算出电流设定值;然后针对电流设定值与实际电流之间的差,利用PID 控制器进行调节,发出目标电流控制指令,控制滚筒电机运动,进而控制系缆在滚筒上的运动。
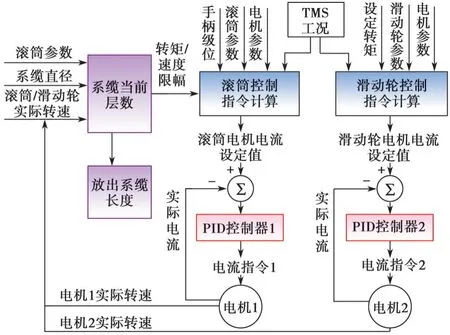
图4 TMS 运动控制逻辑Fig.4 TMS motion control principal structure
在控制滚筒与滑动轮运动的同时,滚筒控制指令计算单元还结合滚筒与滑动轮的实际转速、滚筒参数与系缆直径等,计算系缆当前所处层数以及已经放出的系缆长度。
操作人员在水面控制机器人在水下的运动。为了使机器人运动安全稳定,TMS控制系统对来自操作控制杆的手柄级位信息有着严格的要求,详见图5。为了防止系缆工作状态受到操纵杆非正常扰动的影响,控制系统对控制杆的输入进行了多重校验,直到最后输出手柄控制指令。操纵杆手柄控制指令以百分比的形式输入。为防止误触动或者其他原因带来的扰动,设置手柄级位限幅值。如果输入小于设置的限幅值,手柄级位输入强制置0;如果大于设置的限幅值,手柄级位输入则进入下一步。此外,为了满足不同操纵者的灵敏度控制要求,根据操作者习惯设定灵敏度,灵敏度参数最大值为100%,小于该值表示降低操纵手柄的灵敏度。操作者的手柄级位信息在经过手柄级位限幅控制、灵敏度控制后,输出为最终的滚筒电机目标级位信息。
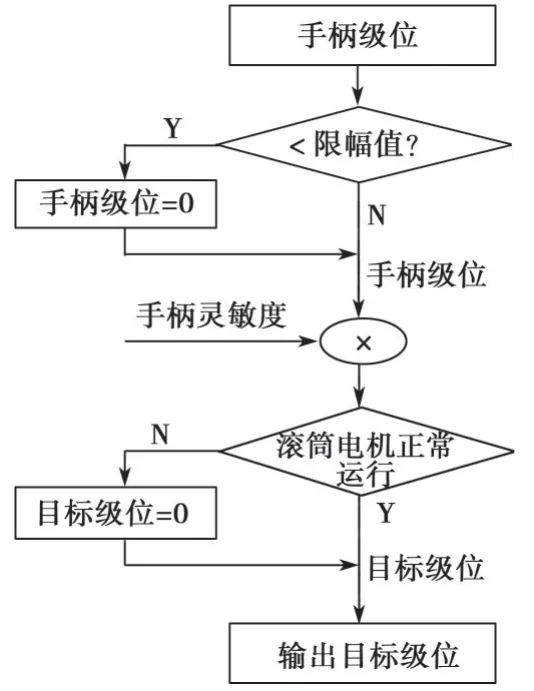
图5 操纵杆手柄指令控制Fig.5 Control commands of joystick
3.2 典型控制模式
在ROV深海航行与作业期间,TMS需要随时根据ROV的运动情况对系缆进行调节控制,既要确保ROV不会被TMS拖拉而影响作业,也不宜放出过长的系缆导致ROV被缠绕。
在实际工作过程中,为了防止系缆过紧或者过松对ROV 运动产生影响,针对系缆处在滚筒不同层数,对滚筒的最大力矩限制与最高速度限制进行动态调节,以避免内层系缆在缠绕滚筒的过程中产生较大的张力,实现低张力缠绕,即层数越小的,力矩应尽可能越小。图6为典型的系缆层数与最大力矩/最高速度的关系图,处在层数1、2 的系缆最大力矩要小于处在层数4、5系缆的,处在层数1、2的系缆最高速度要大于处在层数4、5系缆的。
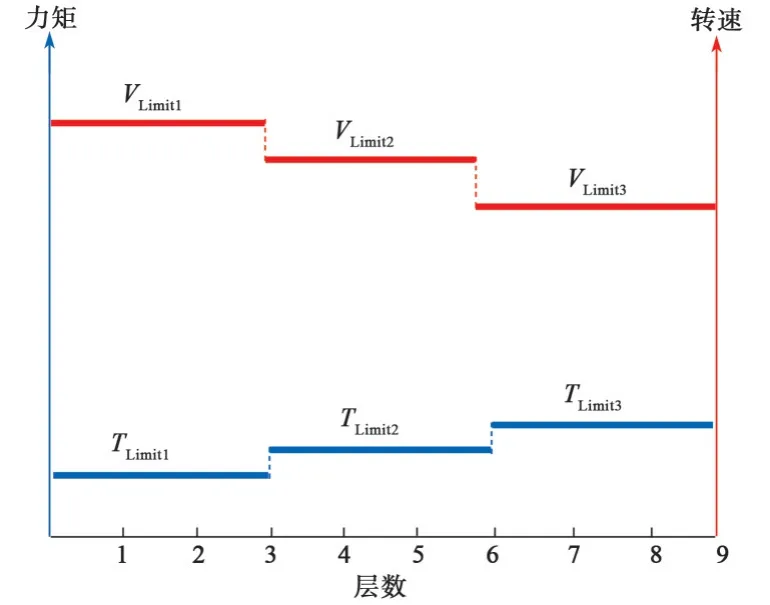
图6 系缆层数与最大力矩/最高速度的关系Fig.6 Relationship between tether layers and the maximum torque or the maximum speed
系缆管理系统在ROV 工作时的典型工作模式有放缆和收缆两种,在不同工作模式下,滚筒与滑动轮二者之间均需协同运动,以控制系缆运动,进而控制系缆的放出与回收。
3.2.1 放缆模式
当TMS工作在放缆模式(如ROV需要下潜时)且系缆不受其他负载作用时,TMS上的滚筒与滑动轮之间运动关系如图7所示。TMS运行在放缆模式,滑动轮工作转矩设定为T2(逆时针方向),先启动滑动轮,滑动轮以速度V2逆时针转动,让滑动轮转矩以一定加速度逐渐增加到工作转矩T2。放缆时,滚筒工作在速度控制模式,滚筒启动时受到摩擦力矩Tf、惯性力矩TIn和来自滑动轮的力矩-T2的综合作用(即施加在滚筒上的扭矩为Tf-T2+TIn),以速度V1沿着顺时针方向运动。在该过程中限制滚筒的最大运行速度,一旦达到滚筒目标转速后,施加在滚筒上的扭矩调整到Tf-T2,在这个过程中系缆平稳离开滚筒,然后通过滑动轮被放下来。
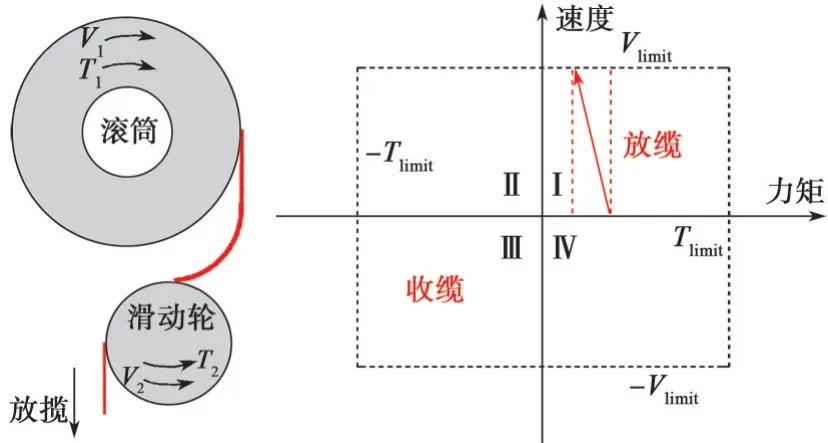
图7 放缆运行原理Fig.7 Principle of pay-out motion
3.2.2 收缆模式
当TMS工作在收缆模式(如ROV需上升时)且不受其他负载作用时,TMS上的滚筒与滑动轮之间运动关系如图8所示。TMS运行在收缆模式,滑动轮工作力矩设定为T2(逆时针方向),先启动滑动轮,滑动轮以速度V2顺时针转动,让滑动轮转矩以一定加速度逐渐增加到工作转矩T2。收缆时,滚筒工作在速度控制模式,滚筒启动时受到摩擦力矩Tf、惯性力矩TIn与来自滑动轮的力矩T2综合作用,即Tf+T2+TIn,滚筒以速度V1沿着逆时针方向运动。在该过程中限制滚筒的最大运行速度,一旦达到滚筒目标转速后,施加在滚筒上的扭矩调整到Tf+T2,在这个过程中系缆先经过滑动轮,然后平稳缠绕在滚筒上。

图8 收揽运行原理Fig.8 Principle of pick-up motion
4 功能测试
为了测试该电动TMS是否满足实际应用要求,将电动TMS 与ROV 连接,在专用测试水池对电动TMS与ROV系统进行了功能测试。水面控制系统发控制指令到水下控制器,缆根据设计目标在滚筒和滑动轮之间按照设计的控制逻辑运动,并且人机交互界面实时显示缆当前所处层数与已放出缆的长度信息。当放出的缆长度大于700 m时,能正常提示“滑动轮上的系缆即将接近第1层”。处在滚筒不同层数的缆能按照限定的最大速度与最大力矩范围缠绕在滚筒上或者从滚筒上绕出,能正常配合ROV 工作开展水下作业。实验结果表明,该电动TMS 水面-水下控制系统满足放缆与收揽应用要求。
5 结束语
为了提高深海有缆作业机器人系统的工作效率与稳定性,本文提出了一种电动系缆管理系统,该系统由滚筒、滑动轮、电机及驱动器等组成; 并结合系缆管理系统实际工作要求,设计了TMS 水面-水下控制系统及其逻辑控制方法,通过限定不同层数系缆的最大力矩与最高速度以及控制系缆伸缩和滚筒速度,实现了系缆的低张力缠绕。通过专用测试水池对该电动系缆管理系统与ROV 系统进行了实物连接测试,结果表明,该电动系缆管理系统对系缆收放调控能满足ROV水下运动的应用要求。