一种用于水电站水工建筑物缺陷检测的水下机器人系统设计
2024-01-09袁庆晴翁叶伟彭世东沈维格
张 易,朱 俊,袁庆晴,翁叶伟,彭世东,沈维格
(1. 中国长江电力股份有限公司,湖北 宜昌 443002;2. 上海中车艾森迪海洋装备有限公司,上海 201306)
0 引言
混凝土结构是水利工程的基本结构,在水电站运行过程中,水工建筑物水下部分的混凝土受到大流量含砂水流的冲蚀,过流面会出现冲坑、剥落等缺陷,结构缝遭受挤压变形进而出现缝边混凝土破损及填充物丢失等缺陷,同时温度及结构应力也会引起混凝土出现裂缝、破损等缺陷[1]。针对上述缺陷,目前通常采用沉柜局部排水、抽干旱地和潜水员水下等检修方式[2]。然而,沉柜局部排水检修。适用范围有限、工期长且存在一定的安全风险;抽干旱地检修,工期长、安全风险大及检修成本高,同时,存在泄洪消能、建筑物排水后会对其自身结构产生不利影响等问题;潜水员水下检测,安全风险高、工作效率较低,一旦超过60 m 水深,深潜水成本高、工期长,对超过人工潜水极限深度的水下混凝土缺陷,目前还没有可行的水下作业手段。
本文研制的水下检测机器人[3],利用了本体浮游和履带复合模式、不规则坝面吸附、多自由度姿态翻转和运动、缺陷位置定位、缺陷判别与测量和修补材料方量的估算等技术,实现了机器人在水电站水工建筑物的水平面、斜面坡、直立面及曲面环境下的水下缺陷检查、缺陷定位、缺陷尺寸测量及数据记录收集等水下无人化检测作业。
1 系统概述
水下检测机器人是一款适用于水下建筑物缺陷检测的机器人系统。其主要用于水电站水工建筑物水下大范围缺陷检查、缺陷定位、缺陷尺寸测量及数据记录收集,适应对水下建筑物的水平面、直立面和斜坡面检测。
该检测机器人采用推进器及履带复合的推进方式,具有浮游和爬行两种运动模式。利用4个高性能垂直直流无刷推进器,使机器人在靠近水下建筑物墙面时可以实现横滚运动,改变姿态,紧贴墙体并吸附,与磁吸、负压等吸附方式相比较,具有不增加额外吸附装置,减少能耗,浮游和吸附无缝衔接,经济性、适应性和实用性更广等优势;4个大推力水平推进器,可以保障爬行的遥控水下机器人(remotely operated vehicle, ROV )在水平方向的多姿态运动。其在电气系统中预留多个备用接口,以方便搭载扩展设备。和同类其他产品相比,该检测机器人具有更高的整体性能和多样化的适应能力。
1.1 系统组成
检测机器人系统由水下系统和水面系统组成,系统结构如图1所示。其中,水下系统包括主体框架及浮力材料、电控舱、推进器、摄像机系统(搭载光学摄像头和LED 灯)、脐带缆、基本传感器组(陀螺仪、深度计、高度计、水声定位传感器)、声学传感器组(避障声呐、图像声呐)、缺陷检测系统及检漏装置等;水面系统包括电动绞车、甲板控制单元、电源管理系统、控制盒及显控单元等。检测机器人系统实物组成如图2所示。

图1 检测机器人系统组成框图Fig. 1 Block diagram of the detection robot system composition

图2 检测机器人系统实物组成Fig. 2 Physical composition of the detection robot system
1.2 系统总体指标
检测机器人系统总体指标参数如表1所示。
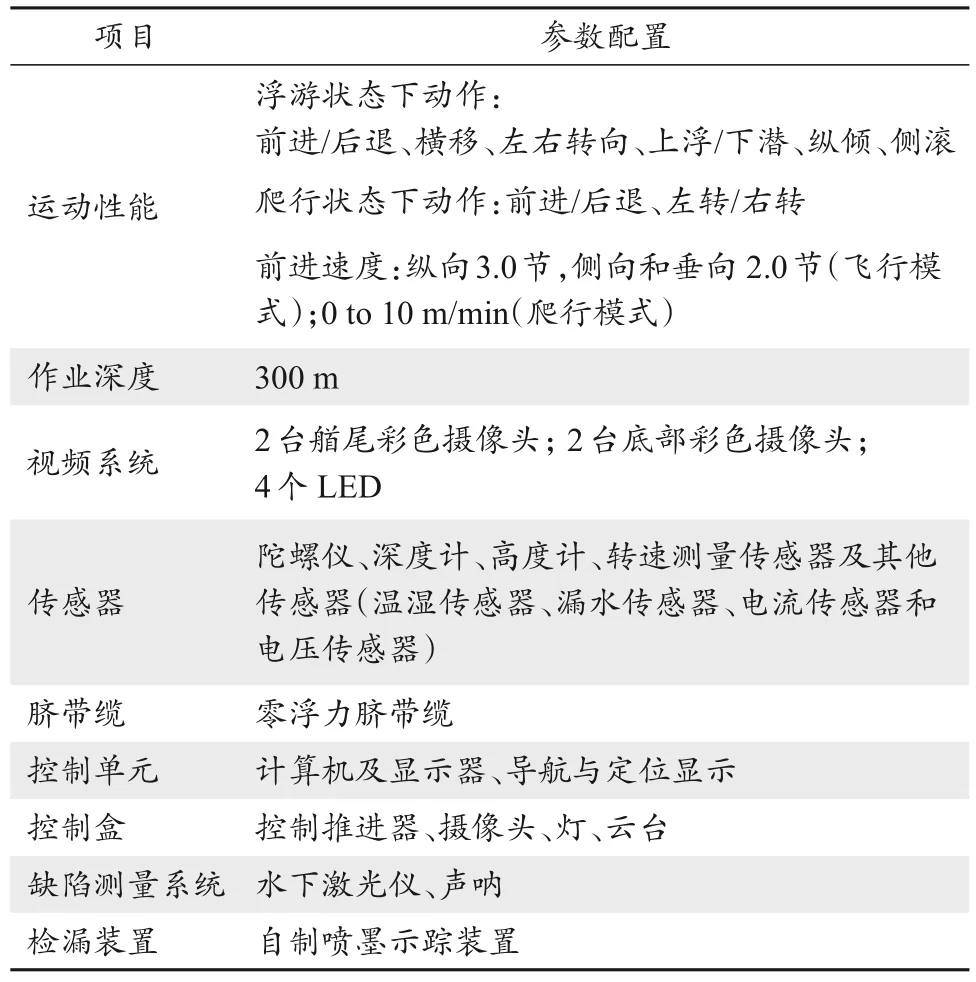
表1 检测机器人系统总体指标参数Tab. 1 Overall index parameters of the robot system
2 整机布置设计原则
为了实现机器人在水中多自由度的运动和行走,本系统采用推进器及履带复合的推进方式,以满足其在水下直立面、斜面及水平面等作业面上的行走检测需求。浮力材料采用上下分层布置,水平矢量布置4台推进器,垂直布置4台推进器,满足3节抗流及对多姿态的运动性能需求。整机所有部件布置原则要求:在机器人物理中心周围对称布置。水下机器人整体布置如图3所示。

图3 水下机器人本体整体布置Fig. 3 Overall layout of the underwater robot body
2.1 浮力材料布置
为了解决机器人在水中处于零浮力状态和姿态翻转等问题,本文采用顶部和底部对称布置浮力材料,以平衡恢复力矩,减少控制复杂度。相较于常规有缆机器人仅顶部布置浮材,本文的设计具有减小翻转姿态调整时产生的翻转力矩,减少控制能耗输出和控制难度等优点。
2.2 推进系统布置
为了满足机器人在水中多自由度的运动和在复杂作业面上行走要求,推进器采用“4+4”配置方式,即4个水平推进器和4个垂直推进器。4个水平推进器采用45°的矢量布置,位于机器人中心线水平面上的4 个角,同时考虑重心的均衡需对称布置。4个垂直推进器采用90°角度布置,位于机器人中心线的垂直面,同时满足翻转、复杂作业面吸附和履带行走的接地压力设计要求。推进器布置如图4所示,序号1~序号4为垂直推进器,序号5~序号8为水平推进器。
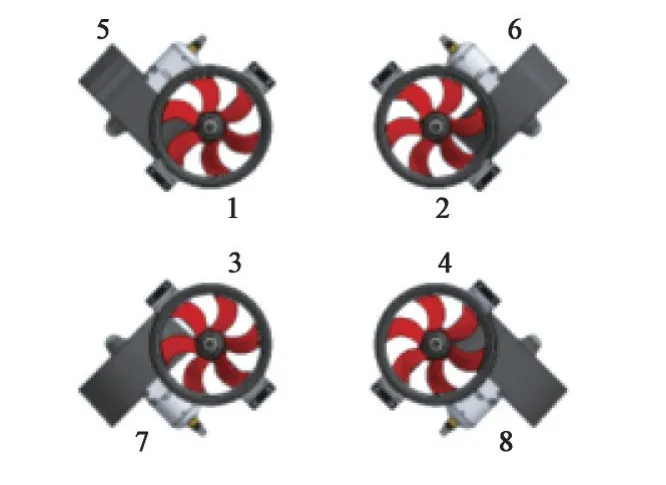
图4 推进器布置Fig. 4 Arrangement of the propellers
2.3 行走与检测系统布置
机器人艏部布置检测用摄像机系统、激光仪和检漏装置等设备,履带驱动装置位于尾部,用于平衡艏部的部件重量,两条履带左右对称布置。
2.4 电控舱布置
电控舱不仅是机器人的控制大脑,也是所有检测部件采集和信息传输的控制枢纽。为了重心平衡要求,将其布置于机器人物理中心的下方。
3 静水力性能与稳性设计分析
水下机器人在吊放回收过程及静水中均需保持相对稳定和平衡,因此静水力性能的计算是关键。本文通过对机器人整机的重心和浮心位置进行计算,利用软件包络法赋予每个部件重量,并经过设计软件多次迭代调整,最终确定整机部件布置和静水力性能。
3.1 重心和浮心计算
在计算整机部件布置和静水力性能时,本文按照以下原则进行:(1) 参照坐标系原点设定 ,取顶部支撑板底部和吊点垂直相交的点为原点,x负轴为ROV前进方向,y正轴为本体左侧,z正轴为ROV 垂直向下运动方向;(2)采用软件包络法赋予每个部件为实体,通过软件计算出其空气重量和水中重量;(3)通过列表法,统计非浮材部件水下重量、坐标,然后计算出总重(G)和重心合力矩∑(Mgx,Mgy,Mgz);(4)同理,统计出顶部和底部浮材水中总合力(F)和浮心合力矩∑(Mfx,Mfy,Mfz);(5)分别通过合力矩除以总重,得出浮材和非浮材两者的坐标值;(6)判断两者坐标差(ΔX,ΔY,ΔZ),调整部件的安装位置或配重位置,直至ΔX,ΔY接近0,ΔZ大于0。
3.2 稳性核算
通过多次的迭代调整,得出(ΔX,ΔY,ΔZ)为(-0.2 mm,-3.6 mm,91 mm),满足稳性设计原则:浮心在上,重心在下。机器人在水中处于漂浮状态,其浮心与重心在z方向的差值,称为稳性高;稳性高至少要大于70 mm才能使水下机器人保持稳定[4]。
4 水阻力分析及仿真
在初步设计方案之前,利用水阻分析和仿真技术对推力、航速和外形尺寸等参数进行估算,作为详细设计计算的基础。按照矢量布置推进器选型,纵向总推力为42 kgf(1 kgf≈9.8 N),侧向总推力42 kgf,垂向总推力60 kgf。
4.1 水阻力经验计算
机器人本体总尺度约为950 mm(长)×900 mm(宽)× 650 mm(高),纵向迎流面积约为0.585 m2,侧向迎流面积约为0.62 m2;垂向迎流面积约0.86 m2;在纵向设计航速为3.0 节(1.0 节航速为0.5 m/s)情况下,计算本体阻力为40.2 kgf;在侧向设计航速为2.0 节情况下,计算本体阻力为25.3 kgf;在垂向设计航速为2.0节情况下,计算本体阻力为53.7 kgf。
阻力性能计算公式为F= 1/2ρv²CdA,其中F表示阻力,ρ表示水的密度,v表示物体在水中的速度,Cd表示物体的阻力系数,A表示物体的迎流面积。根据阻力性能公式,绘出纵向、侧向及垂向的阻力与速度的关系,其随速度增大而增大,具体如图5~图7所示。
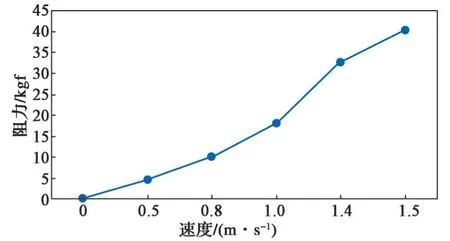
图5 水下机器人纵向阻力-速度曲线Fig. 5 Longitudinal resistance-velocity curve of underwater robot

图6 水下机器人侧向阻力-速度曲线Fig. 6 Lateral resistance-velocity curve of underwater robot
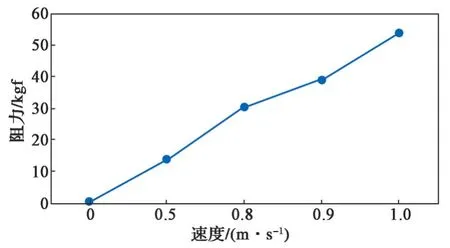
图7 水下机器人垂向阻力-速度曲线Fig. 7 Vertical resistance-velocity curve of underwater robot
4.2 水阻力仿真计算
采用经验值和水阻力仿真模拟2种方式计算机器人以设计速度运行时沿x轴、y轴、z轴所受的水流阻力,两种方式计算出的水流阻力结果相互印证,可用于设计之初对推力进行选择,以给出更精确、更快捷的理论支持。仿真计算内容主要为:计算纵向运动速度3.0节时ROV 所受纵向阻力;计算横向运动速度2.0 节时ROV 所受侧向阻力;计算垂向运动速度2.0 节时ROV所受垂向阻力。具体仿真数值如表2所示。简化的数值模型如图8 所示,ROV 沿纵向、侧向、垂向直航时特征截面的速度云图如图9所示。

表2 ROV 以设计速度运动时的水流阻力Tab. 2 Water flow resistances of ROV at design speeds
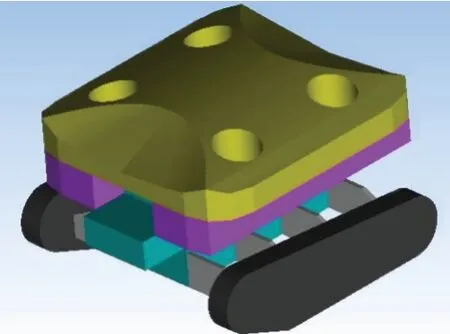
图8 ROV 简化数值模型Fig. 8 Simplified numerical model of the ROV
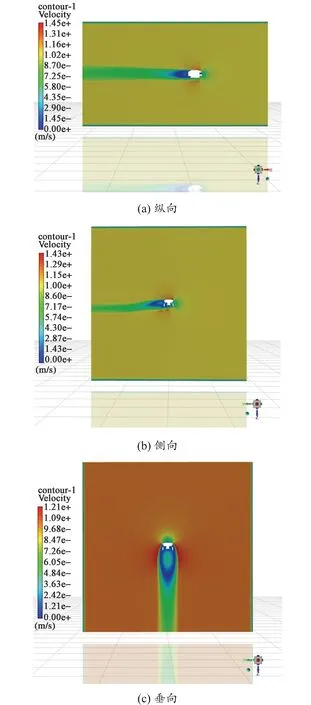
图9 机器人速度云图Fig. 9 Cloud chart of robot speed
仿真软件计算输出:纵向设计航速为3.0 节时,本体阻力为25.5 kgf;侧向设计航速为2.0节时,本体阻力为21.4 kgf;垂向设计航速为2.0 节时,本体阻力为39.2 kgf。经验值计算结果和仿真模拟计算结果都印证了,纵向、侧向、垂向推力均未超出推进器选型时纵向总推力42 kgf、侧向总推力42 kgf、垂向总推力60 kgf的设计选型要求。因此推力设计满足纵向3.0节、侧向2.0节、垂向2.0节的项目设计要求。
5 缺陷识别和大小估算
该机器人系统搭载定位系统、图像声呐和水下激光仪等传感器。在机器人爬行检测过程中,系统首先利用声呐对坝体进行大范围的扫测[5];发现异常缺陷后,抵近观察,利用水下三维成像激光仪定点近距离精细扫测,并打点记录位置。通过激光仪获取三维成像数据,利用后处理软件实现水下目标的自动特征提取和目标识别[6],对缺陷部位的面积和体积进行自动计算,实现修补材料方量的估算,为后续修复作业提供数据依据。后处理软件界面如图10所示。

图10 激光仪后处理软件界面Fig. 10 Interface of the post-processing software for the laser instrument
通过3D打印技术制作缺陷模型,如图11所示。将缺陷模型置于水中,由水下激光仪扫测此模型的三维数据,利用后处理软件进行点云平滑处理、曲率计算以及特征区和非特征区的划分,最后进行面积和体积的计算。
试验选取目标物体积为0.15×0.235×0.056×1/3 =0.000 658 (m3)。通过对点云表面进行三角网网格剖分(图12),把每一个三角网投射到点云所在的平面上,计算每一个小三角棱锥的体积并进行积分,得到最终的体积为0.000 707 m3。软件识别理论误差约为7.4%,小于项目要求中20%的误差率。

图12 缺陷模型的网格Fig. 12 Grid of defect model
6 水池功能试验
通过水池试验完成机器人定向、定深、定高[7]、定速等自动控制,同时测试机器人在水中翻转和垂直吸附墙壁爬行的功能。最终试验完成了各项功能测试,通过了验收,得到了用户的认可。试验过程如图13所示。
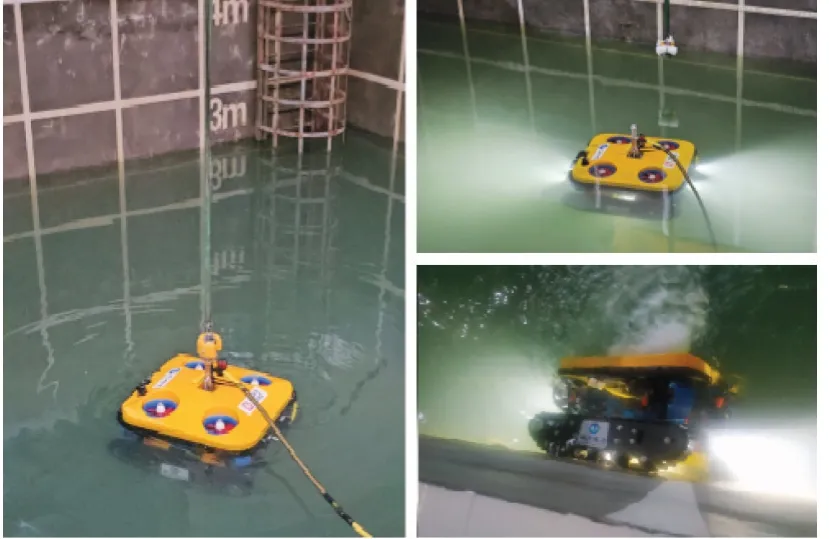
图13 机器人水池试验Fig. 13 Pool test of the robot
7 结束语
本文针对水电站水工建筑物的缺陷检测应用需求,研制了一套检测机器人系统。其结合机器人及传感器技术,利用浮游和履带复合运动模式,实现了在不规则坝面的吸附和行走,完成了检测任务。该系统搭载声、光、电多维检测设备,实现了缺陷位置定位[8]、缺陷判别与测量、修补材料方量的估算等功能,可用于水电站水工建筑物的缺陷检测。该系统作业深度可达300 m,应用范围广,可以推广至海上风电检测应用。未来,该系统可以拓展智能模块,应用水下激光SLAM技术[9]进行水下地形和结构物的扫测和识别[10-11]、采用自动路径规划进行检测[12]等,以进一步提高作业精确性和智能化。