七自由度上肢外骨骼康复机器人设计与仿真①
2024-01-06李宪华杜鹏飞
邱 洵, 李宪华, 杜鹏飞, 蔡 钰
(安徽理工大学人工智能学院,安徽 淮南 232001)
0 引 言
我国正面临着全球最大的卒中挑战,据统计[1],2019年我国新增的卒中病例为394万例,卒中患者总数达到2876万例,而卒中死亡人数高达219万例。脑卒中会降低患者对肌肉的控制能力,导致患者产生严重的躯体功能障碍。由神经可塑性原理[2],采用具有目标导向性的康复训练有望改善患者患侧肢体的运动功能的恢复。传统的康复治疗通常要求患者在康复医师的指导下完成大量重复的康复训练动作。然而,鉴于专业康复医师的数量和训练动作的精度和效果受限,该方法难以满足患者的需求。根据临床调查,机器人辅助中风康复能够有效提高治疗效果[3]。上肢康复机器人按照不同的构型可以分为两类:一类为末端牵引式,另一类为外骨骼式。例如ANYexo2.0[4]上肢康复机器人,其具有九个主动自由度,肩部具有五个主动自由度,人机耦合性和柔顺性较高,该机器人系统实现了足够的运动范围(ROM),可操作度,速度和强度。u-Rob[5]上肢康复机器人,其优点是同时具有末端牵引式和外骨骼式康复机器人的功能,并且其上臂袖带中安装有纽扣式力传感器可以用来测量患者上臂的相互作用力。Harmony[6]上肢康复机器人,其可以同时带动患者的左右臂进行康复训练,肩部三个关节旋转轴线非正交,机械臂的工作空间较大。
1 上肢外骨骼机器人结构设计
机器人结构设计的好坏直接影响了机器人的性能,上肢外骨骼康复机器人的结构设计要从机构安全性、人机耦合性、结构轻量化与灵巧性出发。首先,康复机器人各个关节要具备机械限位装置,以确保卒中患者使用过程中的安全。其次,机器人各个关节旋转轴线要与人体上肢所对应的关节轴线相匹配,并根据人体工程学设计被动自由度以提高人机耦合性。最后,在满足强度与使用要求的情况下,通过有限元分析软件,减小机器人各部分的尺寸与重量、优化结构,使机器人的体积变小、重量降低、结构灵巧。
人体上肢主要由肩部、肘部和腕部三个关节组成,其运动复杂,冗余度高。上肢外骨骼机器人一共具有七个主动自由度,分别为肩部三个自由度,肘部一个自由度和腕部三个自由度,三维模型采用SolidWorks进行设计,具体模型如图1所示。为满足不同人群的使用,由中国成年人人体尺寸GB1000-88[7],得到成年人臂长和坐姿肩高如表1所示,从而确定机械臂主要部分的尺寸,其中机械臂坐姿肩高调节范围为870 mm -1130 mm,上臂长度调节范围为250 mm -350 mm,前臂长度调节范围为185 mm -270 mm。

表1 中国成年人臂长和坐姿肩高
根据表1设计外骨骼机器人坐姿肩高为1000mm,上臂长度为320mm,前臂长度为240mm。根据人体上肢运动可达范围设计机械臂各自由度的运动范围,如表2所示。

表2 七自由度机械臂关节运动参数

图1 上肢外骨骼康复机器人模型
2 上肢外骨骼机器人驱动方案
液压驱动、气压驱动和电机驱动是机器人常用的驱动方式[8]。但考虑到成本、安全性、控制效果及维修方便等因素,现有的上肢康复机器人绝大多数都选择采用电机作为机器人的驱动方式。机器人常用的控制电机有直流电机、伺服电机和步进电机。由于步进电机存在低速振动、控制精度低且无反馈调节功能,一般不作为康复机器人的驱动设备。对于康复机器人来说,需具备高精度、高稳定性和反馈调节等特性,因此通常在驱动方案上会选择伺服电机。但考虑到人体上肢运动的低速性,需要通过减速器来降低伺服电机的转速,以提高康复训练的安全性。而谐波减速器具有高精度、大扭矩、运行平稳等优点,并且体积小、重量轻,符合机器人康复训练的要求。伺服电机-谐波减速器驱动模块如图2所示。
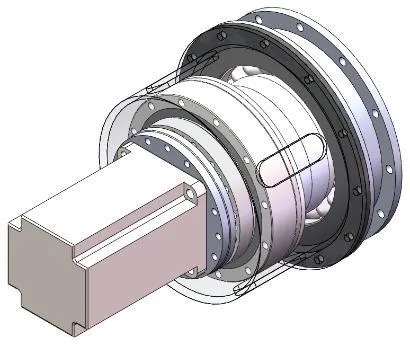
图2 伺服电机-谐波减速器驱动模块
机器人各关节所需的驱动力从基座到末端执行器是依次递减的,为此康复机器人肩部与肘部四个自由度采用伺服电机加谐波减速器作为驱动模块,而腕部三个自由度由于所需驱动力较小,因此采用直流减速电机作为驱动模块。

图3 机器人连杆坐标系
3 运动学分析
3.1 建立机器人D-H坐标系模型
根据七自由度上肢外骨骼康复机器人的构型特点,采用D-H法建立各个连杆的连杆坐标系,并将该构型的基坐标系原点设在肩关节1处,由于肩部三个关节和腕部三个关节的旋转轴线都相交于一点,为简化模型,分别把肩部三个坐标系和腕部三个坐标系进行重合,机器人完整的连杆坐标系如图3所示。完成坐标系的建立后,根据连杆的坐标系关系,得到机器人的D-H参数见表3所示。
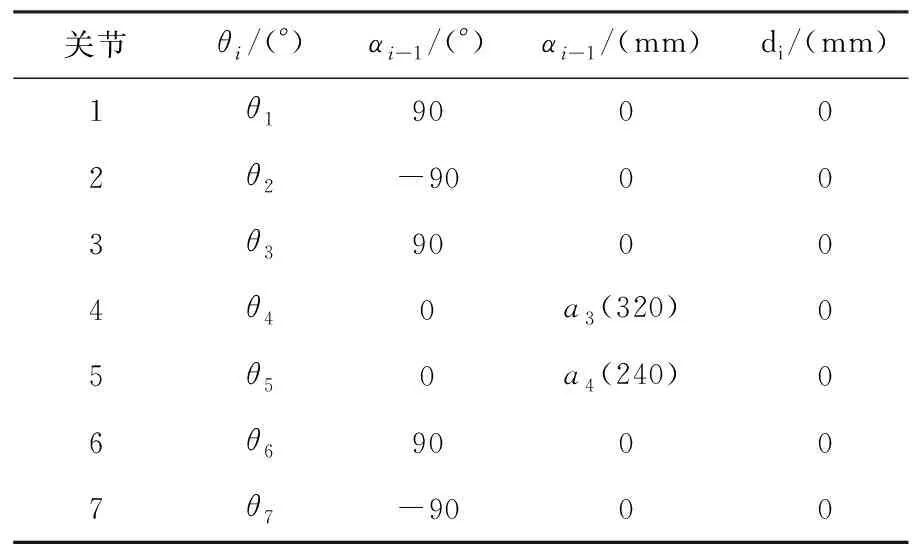
表3 机器人D-H参数
3.2 正运动学分析

(1)
式(1)中,sθi=sinθi,cθi=cosθi;sαi-1=sinαi-1;cαi-1=cosαi-1。
由式(1)可以得到杆件的变换矩阵为:
将上面的矩阵依次相乘,便可以得到机械臂末端在固定坐标系下的位姿变换矩阵为式(2):
(2)
式(2)中,n为机械臂末端的法线矢量;o为机械臂末端的方向矢量;a为机械臂末端的接近矢量;p为机械臂末端的位置矢量。
4 基于ADAMS的动力学仿真
4.1 机器人ADAMS建模
ADAMS软件属于机械产品中虚拟产品开发领域的专业软件。它通过多体动力学模型和虚拟实验的建立,旨在帮助设计者在产品开发阶段中发现设计缺陷,并提供改进方法。在机器人动力学分析方面,该软件主要是通过在软件中设置与实际情况相符的参数,进行仿真,以获取各关节所需的驱动力或力矩。
通过SolidWorks建立如图1所示的七自由度上肢外骨骼康复机器人的简化模型,并将模型导入ADAMS仿真软件中,导入模型后对机器人各个构件的材料属性和转动惯量通过SolidWorks测量得到的数据进行定义,确定各个关节之间的连接与约束后,为各个关节添加摩擦系数,约束添加后的模型如图4所示,图中水平方向为x轴,竖直方向为y轴,z轴通过右手定则判定。
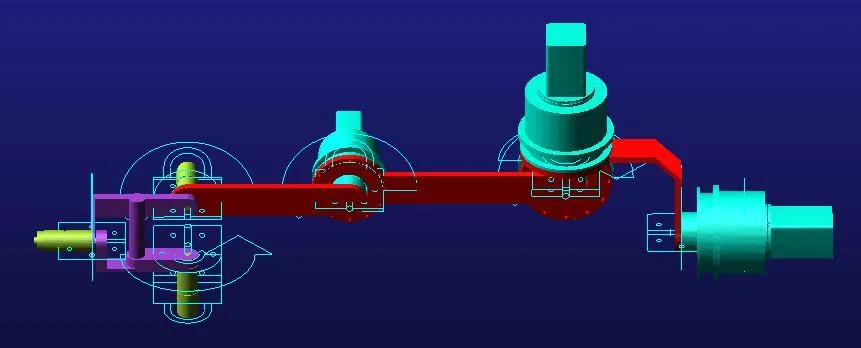
图4 机器人约束与驱动图
4.2 添加驱动并仿真
通过MATLAB利用5次多项式插值函数对机械臂进行轨迹规划,机械臂各关节角度从(0 °,0°,0°,0°,0°,0°,0°)变化为(100 °,30°,-40°,110°,30°,50°,60°),得到该过程中关节1-关节7的角度随时间变化的数据,时间设置为1s,采样步数设置为41。
将MATLAB中得到的各个运动关节的角度数据导出,然后在ADAMS中,将该数据作为数据单元导入模型中形成SPLINE曲线[9]。采用CUBSPL函数[10]作为模型的驱动函数。机械臂第一个关节的驱动函数为CUBSPL(time,0,SPLINE_1,0),其余各关节驱动函数则与之类似。
考虑到机械臂在真实情况下是带动患者上肢进行康复运动的,所以仿真时要考虑患肢的重量对机械臂运动的影响,根据GB17245-1998成年人人体质心的数据,计算得到上臂、前臂和手的质量分别为1.86kg,0.88kg和0.45kg。将患者上臂、前臂和手由重力而产生的力分别作用于机械臂的模型上,最后,设置仿真时间为1s,仿真步数为500,点击仿真按钮。仿真完成后可以在后处理模块中查看运动仿真过程中各个关节所受的力矩随角度变化情况。
其中关节1-关节4所受的力矩随关节角度变化如图5所示。

(1)关节1所受力矩随角度变化图

(2)关节2所受力矩随角度变化图
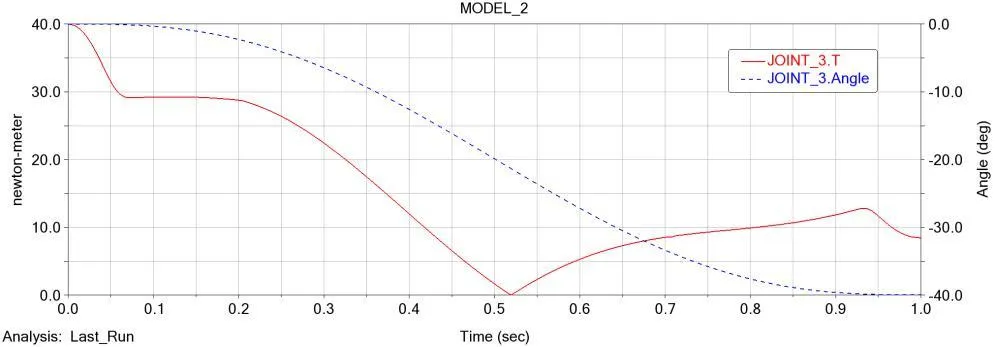
(3)关节3所受力矩随角度变化图

(4)关节4所受力矩随角度变化图
由图5得到关节1、关节2、关节3和关节4在该运动过程中所受力矩的最大值分别为66.98Nm,28.99Nm,39.99Nm和15.21Nm。并且图5的(1),(3)和(4)显示当t=0时关节1、关节3和关节4受到的初始力矩分别为24.24Nm,39.99Nm和9.13Nm,这是电机在刚启动时为克服机械臂自身的重力以及患者上肢的重力所产生的,经过静力学的计算,仿真结果与计算结果相符。图5的(2),(3)显示关节2、关节3分别在t=0.458s和t=0.518s时所受的力矩为0,这是由于该时刻作用在机械臂上的合力方向与关节的旋转轴线方向在空间上平行所导致的。图5中关节1-关节4的力矩变化曲线是较为平滑的,说明该过程中机械臂的运动是平稳的。通过得到的关节1-关节4的峰值力矩可以为后续康复机器人设计与电机选型提供参考与判断。
5 结 语
通过对人体生理学结构的分析,在满足患者日常使用需求的条件下,设计了一种七自由度的上肢外骨骼康复机器人。利用D-H法建立机器人的坐标系,基于MATLAB中的RoboticsToolbox建立机器人的数学模型并验证了正运动学方程的正确性,得到机器人各关节角度变化曲线,利用SolidWorks建立机器人的简化模型并导入ADAMS中,将关节角度变化曲线的数据作为机器人的驱动,得到机器人各关节所受力矩变化情况,为后续康复机器人的设计与各关节的电机选型提供依据。
