结合水域变化的土壤湿度监测
2024-01-05朱洪波张兵刘佳典宋伟东李佳
朱洪波,张兵,2,刘佳典,宋伟东,2,李佳
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2.辽宁工程技术大学 地理空间信息服务协同创新研究院,辽宁 阜新 123000;3.大连黄渤海海洋测绘数据信息有限公司,辽宁 大连 116000)
0 引言
土壤湿度是影响地表生物圈动植物生存和发展的重要条件之一,在农业发展、生态环境、水文循环等领域发挥着重要的作用[1-4]。由于土壤湿度受植被覆盖、气象条件、人为扰动等因素的影响,其在分布上存在空间异质性的特点。因此野外人工采样法虽然能获得较为精确的土壤湿度数据,但难以满足广域范围内的土壤湿度监测需要。
遥感技术的发展为大范围、长时序的土壤湿度动态监测提供了可能[5-7]。基于遥感影像的土壤湿度监测方法可分为可见光-近红外波段反演方法、热红外波段反演方法和微波波段反演方法。其中,可见光-近红外波段反演方法利用不同土壤湿度条件在影像上所反映的光谱特性的不同,对土壤含水量进行反演[8]。该方法能够实现广域范围内土壤湿度的快速反演,但受天气影响程度大且反演精度有待提升。热红外波段反演方法利用不同湿度的土壤其热惯量亦不相同的特点,通过土壤表面温度对土壤湿度进行反演[9]。该方法简单易行,但受地表覆被影响较大。微波穿透性强,可实现全天候、全天时对地观测,按其工作原理可分为主动微波反演和被动微波反演两种。主动微波利用后向散射系数反演得到土壤含水量,而被动微波主要是利用亮度温度来估测土壤含水量[10]。但该方法受地表粗糙度和植被覆盖的影响较大,精度有待提升[11]。因此,基于遥感技术的土壤湿度直接反演方法受天气状况、地表粗糙程度和植被覆盖影响较大,限制了反演精度的提升。
由于土壤湿度与区域内水域面积存在地学联系及较强的相关关系,许多专家学者通过构建水域面积与土壤湿度之间的相关关系模型间接获取研究区的土壤湿度[12-13]。随着深度学习的发展,基于遥感智能解译的水域面积提取得到了较为深入的研究。全卷积网络[14](fully convolutional networks,FCN)实现了任意尺寸图像输入并能获取像素级的属性信息。Ronneberger等[15]在FCN网络基础上提出了U-Net网络,基于编解码思想构建深度较浅的卷积神经网络并通过条约连接的方式将影像的高阶语义信息与低阶位置信息相结合,能够实现在小样本条件下的目标像素级精确提取。由于在高分辨率遥感影像中水域轮廓、颜色信息与背景差异明显,刘佳典等[16]提出了一种基于改进U-Net遥感影像水体提取模型,通过减少U-Net网络层数,实现水域面积的快速精确提取。基于遥感智能解译的水域提取方法虽然能够实现水域面积的快速提取或精确提取,但仍未兼顾网络模型运算速度与提取精度之间的关系,轻量级模型在复杂影像中提取精度较深度卷积神经网络相比有待提升,深度卷积神经网络提取速度难以满足大范围水域提取任务的需要。
基于上述问题,本文利用Sentinel-2多光谱影像构建水域面积基准数据集并提出一种基于图像复杂度约束的中高分辨率水域自适应智能提取模型,通过计算影像颜色熵并进行阈值判断输入到不同网络深度的改进U-Net水域提取模型之中,实现研究区水域面积信息的快速精确提取,进而基于三次多项式拟合方法获取研究区土壤湿度信息。
1 材料与方法
1.1 研究区概况
康平地区(42°31'N~43°02'N,122°45'E~123°37'E)位于辽宁省西北部,地势西南部为山地,海拔较高;东部为平原;北部为沙地,海拔较低。康平地区为温带大陆性季风气候,年降水量较多且主要集中于夏秋季节。雨热同期为该地区农作物生长提供了有利条件,因此,康平地区的夏秋季节土壤湿度时空变化对该地的农作物生长、生态格局演变等方面具有重要意义。
1.2 研究资料
研究时间为2017-2022年,采用14个时相的Sentinel-2为数据源,影像空间分辨率为10 m,数据均为水系非冰期(5-9月)云量<10%的遥感数据,并对其进行辐射定标、几何矫正、大气校正[17]等预处理工作。
1.3 研究方法
1)颜色熵阈值。根据颜色直方图特性和信息论中信息熵的概念,John提出基于颜色熵表示图像在色彩上的复杂程度,从而将图像的颜色直方图由多维降到一维[18]。颜色熵即为图像中不同像素值在图像色彩空间中的概率密度函数,如式(1)所示。
(1)
式中:K为图像的颜色数量;Pi代表了第i种颜色值在图像中出现的频率。通过颜色熵阈值的大小可以对自然图像的颜色复杂度进行判断。本文依据颜色熵对遥感影像的复杂程度进行分类,颜色熵阈值如表1所示,并将不同复杂程度的影像输入不同深度的网络模型以实现水域面积的自适应提取,经颜色熵分类后结果如表2所示。其中,经颜色熵阈值分类为简单类型的影像多为大型面状水域。影像中除水域部分外,背景地类较单一,导致水域在影像中特征较为突出,受背景干扰程度较低易于提取。复杂影像如表2右侧4个图所示,其水域多处于建筑用地之中,影像上背景颜色较多,水域特征受背景相似噪声影响程度较大,需较深层次的网络模型提取该类水域特征。

表1 基于遥感影像的颜色熵(H)分类阈值[19]

表2 不同复杂程度的Sentinal-2水体影像
2)自适应水域提取模型。自适应水域提取模型如图1所示,由输入层、图像复杂度计算模块、自适应U-Net水域提取网络以及输出层组成。经过图像颜色熵阈值分类后的影像输入至自适应U-Net水域提取网络之中,自适应U-Net水域提取网络基于经典U-Net网络结构预设了两个不同网络深度的模型。由于U-Net模型编码阶段本质上是特征提取过程,即为输入与输出之间的一种复杂函数映射关系,计算机能够通过前向传播和后向传播在各层中调整参数并自动学习这种映射关系,因此对卷积层的结构进行合理的增删改,并不会影响网络的正常运行。U-Net模型被设计用于医学影像分割,由于高分辨率遥感影像中部分水域特征与背景差异明显,与医学影像分割的复杂背景不同,使用较少的网络层数也可以实现水域的精确提取。故本文针对水域特征与背景差异明显、图像颜色复杂度简单的影像,在U-Net模型的基础上减去一个特征提取层及对应的上采样层,实现在保持一定精度的前提下减少模型复杂程度及运算量,提升水体提取效率的目的。对于复杂背景影像,将其输入至U-Net水域提取模型之中,实现水域面积的高精度提取。

图1 自适应网络提取水域结构图
3)性能评估。为实现对自适应水域提取方法的客观评价,本文以深度学习目标提取领域的性能评估函数作为评价指标,对本文方法在遥感影像水域面积提取的准确性及速度进行评估。首先,为使每张检测结果影像中水域部分与背景部分区分度达到最大,本文将自适应水域提取方法获取的水域影像(即检测结果)与精细标注的水域轮廓影像(即样本标签)进行图像二值化处理,并将检测结果与样本标签的像素级对比结果作为评价指标。本文采用6个性能指标对自适应水域提取方法进行评价。其中,2个为关于提取速度的评价指标,即训练时间和预测时间;4个为关于提取精度的性能评估指标,即精确率(precision)、召回率(recall)、交并比(IoU)和F1分值(F1 Score)。其中,IoU作为图像分割中最常用的性能评价方法之一,是模型提取出的水域像素与真值标签中的水域像素之间的交集与并集之比。IoU值越高,测量样本和真实样本之间的吻合程度越高,模型的准确率也越高。精准率指模型提取出的水体像素里有多少像素是真正的水体像素。召回率指真值标签中的水体像素有多少像素被正确提取为水体。F1是精确率和召回率的调和平均,是为了平衡精确率和召回率的影响,较为全面地评价模型。
2 实验与分析
2.1 实验数据
本文利用海量Sentinel-2卫星搭载的多光谱传感器影像构建水域智能提取基准数据集。
由于水域面积及分布具有空间异质性,且数据获取时光照强度、影像背景复杂程度与云量的不同也会使水域在遥感影像上存在一定差异[20]。因此,为增强本文提出的方法对于不同地区、不同成像条件下的Sentinal-2影像中水域提取的鲁棒性,本文获取辽宁省不同时间、不同区域、不同环境的Sentinal-2影像制作水域智能提取基准数据集,如表3所示。

表3 不同条件下的Sentinal-2水域影像
Sentinal-2多光谱影像的原始尺寸为10 980像素×10 980像素,为提升模型迭代速度,本文以影像中水域为中心的邻域进行裁切,将裁切后图像以重采样的方式调整为512像素×512像素。数据集依据影像的背景复杂程度、光照强度、云量覆盖范围、水域类型等的不同,共制作样本11 300张,其中正样本6 300张,不含水域标签的负样本5 000张。正样本按水域类型可分为河流样本2 300张、溪流样本2 000张和面状水域样本2 000张。按8∶1∶1的比例将数据集划分为训练样本、验证样本和测试样本[21-22]。
利用数据标注软件labelme人工标注影像中水域的边缘线,制作标签集。将样本集及其相对应的标签集组合成供深度学习使用的水域智能提取基准数据集。
2.2 模型训练
利用上述训练集对自适应水域提取网络进行训练,训练过程如图2所示,训练时长为14.2 h。其中,“epoch”表示训练集中所有训练样本被重复迭代的次数,“train loss”和“val loss”分别表示网络在训练集与验证集上的输出结果与样本标签之间的度量,模型在第130个epoch达到最优化参数,如表4所示。
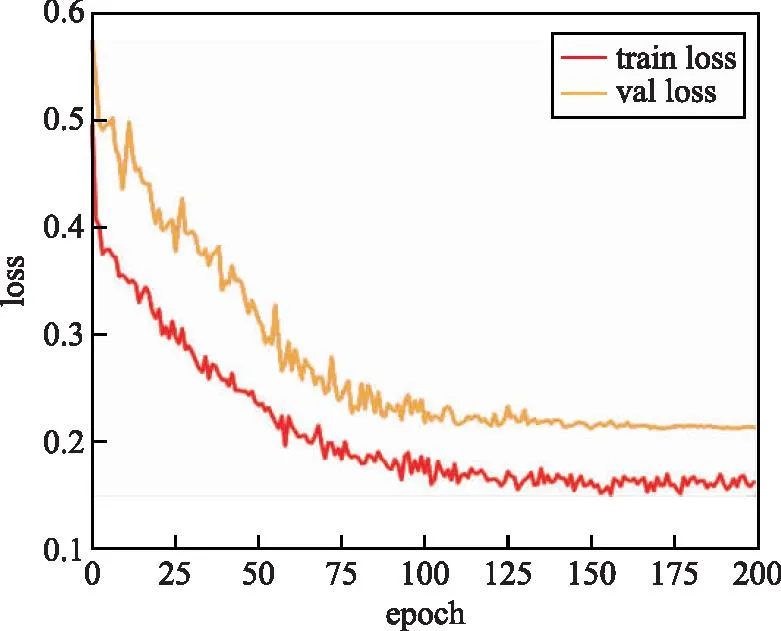
图2 模型训练过程

表4 模型训练最优化参数
2.3 实验结果
本文依据前述数据集中精确标注的630个包含水域的测试样本,对本文方法在自然状态下的水域提取鲁棒性进行评价。为了验证该方法的有效性,采用U-Net模型和本文方法分别对测试集影像水域进行提取实验并以精确标注结果作为真值标签,得到不同水域类型的提取结果与上述两种方法分别对应的6种性能评价指标均值(表5)。

表5 Sentinel-2影像提取结果对比
如表5所示,本文方法与经典U-Net模型对测试集1 130张含有水体的Sentinel-2多光谱影像进行水体提取实验。结果表明,本文方法在IoU、召回率、精确率、F1分数4个关于提取精度的性能指标上略优于经典U-Net模型。同时,受遥感影像背景复杂性的影响,本文方法在训练时间和预测时间两个关于提取速度的性能指标上均大幅优于经典U-Net网络。此外,表6展示了上述两种方法对测试集中的Sentinel-2影像中水体的提取效果。可以看出,在遥感影像背景较为简单的情况下,经典U-Net模型对影像进行较深层度的卷积会损失影像细节信息,导致提取不准确。本文方法依据颜色熵阈值对影像进行自适应提取,能够实现水域信息的高精度快速提取,更适用于实际应用场景。

表6 Sentinel-2影像提取结果对比
3 讨论
区域内土壤湿度的变化是区域气候、地表水下渗能力、人类活动等因素共同作用的结果。在大气降水-地表水-土壤水的转化过程中,土壤水与地表水的补给来源相同且土壤水主要来自地表水下渗作用[23]。因此本文依据康平地区地表水域面积与同期实测不同深度的土壤湿度数据构建二者之间的关系,实现基于水域面积的广域范围内土壤湿度反演。
拟合优度(R2)通常用于衡量两个变量之间的相关性。在本文中,通过计算相关系数来估计水域面积对土壤湿度反演的有效性。当水域面积与土壤湿度之间的相关系数为正时,这意味着二者之间存在正相关关系,反之为负相关关系。此外,R2越大,二者之间的相关性越强。利用14个时相的康平地区水域面积与同时刻实测地表以下10 cm、40 cm湿度数据进行回归分析,如图3、图4所示。
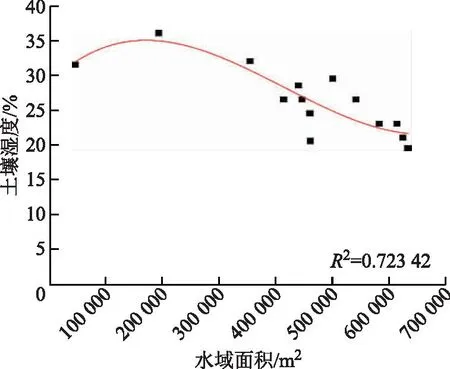
图3 水域面积与10 cm土壤湿度关系图
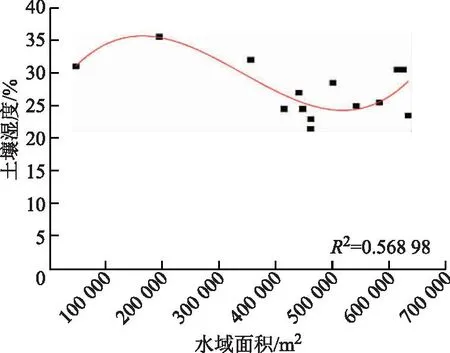
图4 水域面积与40 cm土壤湿度关系图
本文以三次多项式拟合对土壤湿度进行反演。
由图3、图4可知,康平地区水域面积与土壤湿度呈现强相关关系,且随着采样深度的加深,相关性减少。在基于水域面积的土壤湿度反演工作中,文献[12-13]的工作分别证实了本文得出的结论。最后,本文使用的遥感影像空间分辨率为10 m,该因素限制了水域面积提取的精度,会产生一定的解译精度误差,这一问题会随着未来亚米级高分影像的使用得到改善。
4 结束语
本文根据辽宁省多年份Sentinel-2多光谱影像制作大规模、多场景、多类型、像素级水域提取基准数据集。该数据集依照不同地区、光照强度、水域类型、背景复杂程度等方面构建,基于该数据集利用自适应深度卷积神经网络对Sentinel-2影像水域面积进行像素级提取。
通过不同网络深度的U-Net水域面积智能解译模型在保证提取精度的前提下,更好地提升了本文方法对Sentinel-2影像中水域面积的提取速度。
本文在影像分块预测的基础上,依据颜色熵阈值对待解译影像进行颜色复杂度判断,并依据复杂程度的不同将其输入到不同深度的自适应水体解译网络。实验结果表明,该方法在保证解译精度的前提下,基本排除了云量遮挡、光照条件等对水域面积提取造成的影响,改善了因模型复杂和图像过大导致水域提取时间过长的问题,水域提取结果为土壤湿度反演奠定了基础。本文方法在由630张正样本组成的独立测试集中的平均IoU为91.301%,F1为95.009%,训练时间和预测时间分别缩短了25.65%和32.19%。
本文依据14个时相的康平地区水域面积数据及同一时刻不同深度的土壤湿度实测数据,基于三次多项式拟合的方式构建土壤湿度与水域面积之间的关系,实现土壤湿度高精度反演。结果表明,本文所提出的反演方法在10 cm深度的土壤湿度反演实验中拟合优度为0.723 4,在40 cm深度的土壤湿度反演实验中拟合优度为0.568 9。由于本文使用的影像空间分辨率较低会产生一定程度的解译误差,在后续研究中,拟使用高分辨率遥感影像并结合机器学习回归的方式以提升土壤湿度反演的精度。
