一种利用导航轨迹数据的车道信息提取方法
2024-01-05靳慧玲赵婧文吴杭彬
靳慧玲,赵婧文,吴杭彬
(1.上海市测绘院,上海 200063;2.自然资源部超大城市自然资源时空大数据分析应用重点实验室,上海 200063;3.同济大学 测绘与地理信息学院,上海 200092)
0 引言
城市道路信息作为国家基础地理信息的重要组成部分[1],为交通感知[2]、车辆行为分析[3]、地图数据更新[4]等方面提供可靠的依据。车道级道路包含精细化的道路要素,对高精度地图构建有着重要的意义[5]。传统的道路信息获取是基于高分辨率图像数据[6]、高精度点云数据[7]和专业高精度的全球导航卫星系统(global navigation satellite system,GNSS)数据[8]。这些方式可以确保所提取道路信息的质量,但存在数据采集成本高、更新周期长等问题。而众包轨迹数据具有数据量大、时效性强、覆盖面广、成本低等优点,逐渐成为道路信息获取的一种重要数据源。
目前,学者们基于GNSS轨迹数据进行了很多道路相关研究。傅琛等[9]利用与机动车轨迹同步采集的图像对行驶场景进行分类,实现辅助城市复杂道路环境下的地图匹配。王梓豪等[10]基于车载GNSS 轨迹数据,通过分析车辆的掉头行为提出了一种道路U-Turn结构信息获取方法。陆川伟等[11]基于栅格化后的轨迹数据,采用生成式对抗网络提取单向道路。还有一些研究尝试基于轨迹数据提取更精细化的车道级道路信息,而车道级道路信息提取需要以道路中心线为基础。Uduwaragoda等[12]从现有的只包含道路中心线的道路图开始,基于GNSS轨迹采用核密度估计方法生成包含车道中心线的改进地图。Fan等[13]利用已有地图的道路中心线,基于加权约束高斯混合模型和隐马尔可夫模型建立车道提取模型。然而,基于已有地图的道路中心线提取车道信息会影响道路信息发生变化的区域的结果。因此,部分研究基于轨迹自身提取的道路中心线进行车道信息提取。唐炉亮等[14]采用轨迹聚类方法提取道路中心线,并基于高斯混合模型提取车道数量。Arman等[15]基于手机定位轨迹数据,利用Frechet距离构建道路中心线,并基于高斯混合模型提取了高速道路的车道信息,然而对于普通道路还需要解决手机定位数据中包含除机动车以外其他交通方式轨迹的问题。Shu等[16]首先对轨迹数据进行最小二乘拟合提取道路中心线,并基于约束高斯混合模型实现车道级道路信息提取。综上所述,车道级道路信息提取需要以道路中心线作为基础,然而现有研究大都基于已有地图的中心线,或通过聚类方法简单拟合道路中心线,这会影响后续车道信息提取与更新的效率和精度。因此,本文基于手机导航轨迹数据,提出了一种车道信息自动提取的方法。该方法通过分析机动车轨迹的位置分布,精细拟合道路中心线,并基于拟合的道路中心线和高斯混合模型准确提取车道信息。
1 基于机动车轨迹的车道信息提取
1.1 方法总体流程
本文提出了一种利用导航轨迹数据自动提取车道信息的方法,如图1所示。考虑到道路不同通行方向的车道信息是不同的,并且数据中存在噪声,因此首先需根据机动车的车行方向对轨迹数据进行划分,并实现数据清洗。然后,基于轨迹点在道路上的位置分布拟合每个车行方向的道路中心线。最后,基于高斯混合模型和拟合的道路中心线,模拟轨迹点在车道上的分布,提取不同方向道路的车道数量和车道中心线。

图1 基于机动车轨迹的车道信息提取流程图
1.2 轨迹方向划分与清洗
本文基于自适应K-means聚类的方法来区分不同方向的轨迹点。对每个轨迹点Pi的方位角θi进行K-means++聚类,得到不同方向的簇。该算法的主要流程如表1所示,图2(a)和图2 (b)展示了轨迹方向划分结果,不同颜色代表不同的车行方向。
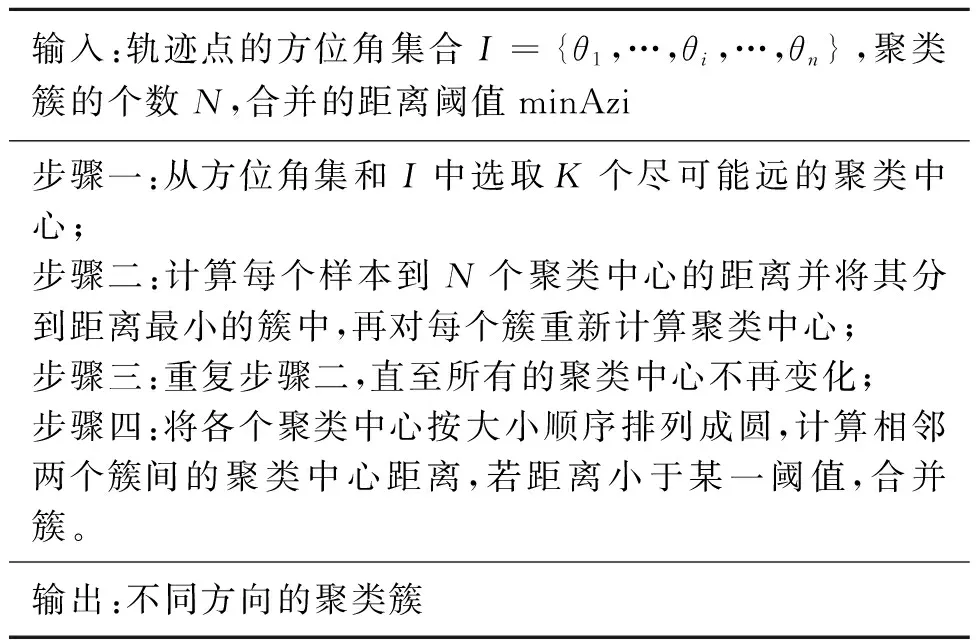
表1 基于自适应K-means++聚类的轨迹方向划分算法

图2 轨迹方向划分与清洗结果
实际数据处理中,每个方向上的轨迹点在该方向道路的两侧会存在一些低密度的漂移点,需对这些漂移点进行清洗。对方向划分后的轨迹,计算每个方向各个轨迹点的密度。以轨迹点邻域内R1(半径为r1)包含的点数作为该点的密度(D),并将密度低于某一阈值的轨迹点作为噪声点进行过滤。数据清洗结果如图2所示,经过数据清洗,可以过滤掉低密度的漂移点。
1.3 车行方向道路中心线提取
本文基于轨迹点在道路上的位置分布提取车行方向道路中心线。通常,靠近中心线的轨迹点(定义为核心点)具有以下分布于特点:在核心点的邻域R2范围内(邻域半径为r2,接近道路宽度的一半),核心点到其行驶方向左侧最远点和右侧最远点的距离近似相等。用F值表示核心点的分布特点,具体的计算方法如图3所示。首先以目标点Pi为坐标原点,目标点的方位角的方向作为y轴,建立直角坐标系xPiy,并基于式(1)计算邻域内其他点在坐标系xPiy中的相对坐标(x′,y′)。
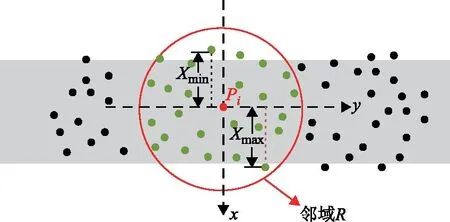
图3 轨迹点的F值计算
(1)
式中:θ表示目标点的方位角;(x0,y0)是坐标原点的真实坐标;(x,y)是邻域内其他点的真实坐标。
对于每个目标点Pi,其邻域内其他轨迹点在xPiy的x坐标值的集合为F_list,因此Pi到其行驶方向左侧最远点的和右侧最远点的距离差F值可表示为F_list的最大值和最小值的和,如式(2)所示。最小值和最大值是除异常值外的最小和最大值,其中异常值采用箱型图分析方法来判断。F值越靠近中心点越接近0,因此F值小于某一阈值的轨迹点即为核心点。
Fi=xmin+xmax
(2)
车行方向道路中心线提取的具体流程如图4所示。首先,进行轨迹方向划分;其次,对每个车行方向轨迹计算F值并提取核心点,在核心点中选取一个初始点,将初始点邻域R内点的中心位置作为第一个道路中心线节点,并将邻域内的点标记为“已判断”;得到了初始中心线节点后,选取邻域外距C1最近的核心点作为下一个初始点,并将该初始点邻域内所有未判断点的中心位置作为下一个中心线节点。重复此步骤,可以得到整个路段的中心线节点。
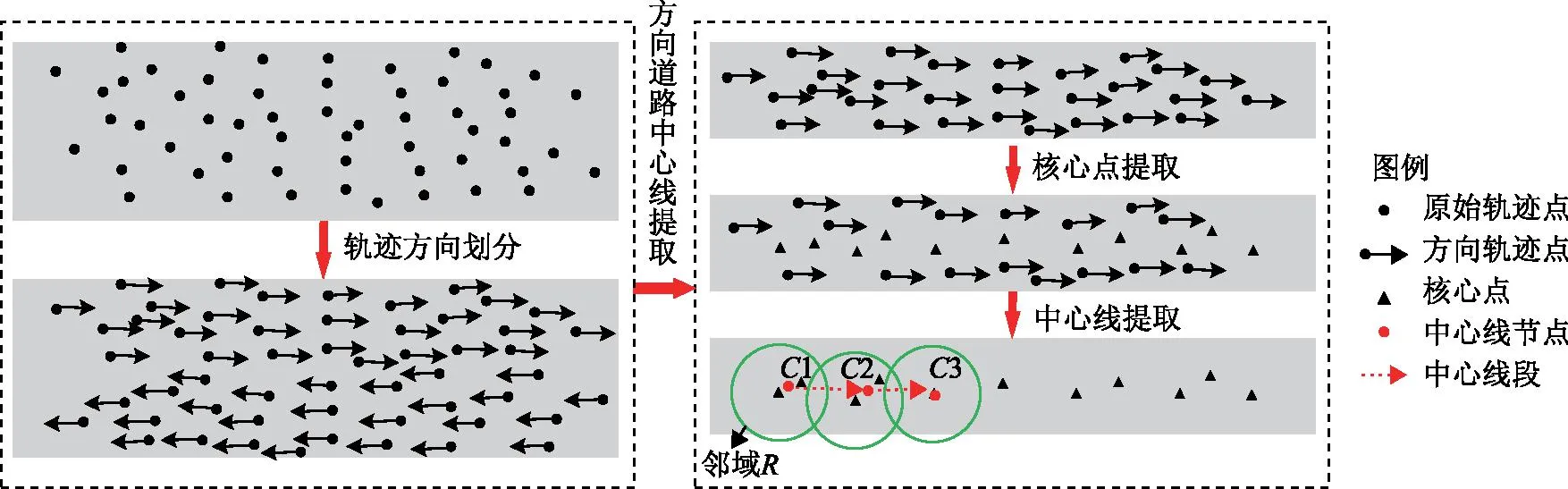
图4 车行方向道路中心线提取
1.4 车道数量及车道中心线提取
1)重叠区域轨迹点过滤。由于轨迹点的数据精度原因,即使进行了数据清洗,一条道路上两个方向的轨迹仍可能存在重叠区域(图5(a)),这会影响后续车道信息提取,因此首先需要去除掉这种重叠区域的轨迹点。本文采取基于核密度估计的方法,对重叠区域的轨迹进行过滤。

图5 基于核密度分布的重叠区域轨迹点去除
对于双向道路,以每个方向的道路中心线作为坐标纵轴建立直角坐标系,计算每个轨迹点在对应的坐标系中的横坐标值。根据每个方向横坐标值集合的分布计算核密度,可以得到两个核密度图;并基于两个方向中心线之间的距离,合并核密度图,如图5(c)所示。如果存在重叠区域,两个核密度值会相交于一点(图中的红点),计算交点到每个方向路段的中心线的距离,以此为标准丢弃距道路中心线两侧距离较大的轨迹点,得到如图5(b)所示,去除了重叠区域的轨迹。
2)高斯混合模型原理。本文使用高斯混合模型进行车道信息提取,并根据轨迹点在道路上的分布特性,添加以下规则进行约束。
规则1:同一条道路上,车道宽度通常是相等的,即车道中心线之间的间隔相等。
规则2:同一条道不同车道上的轨迹行驶方式相似,即不同车道共享同一个方差。
添加以上约束后得到的约束高斯模型如式(3)所示,使用EM方法对模型参数进行求解。
(3)
式中:wj表示每个高斯成分对应的权重;Δμ为车道宽度;μ0为最左边车道中心线的位置;σ2为方差;k是车道数量。
M步:计算新的模型参数(式(4)~式(7))。
(4)
(5)
(6)
(7)
式中:
通过EM方法可以计算给定的k值对应的模型参数,接下来需计算不同车道数量对应的代价函数值,最小代价函数值对应的k值即为最优车道数量。代价函数定义见文献[17],其中R(θk)表示正则化项。根据我国《城市道路交叉口规划规范(GB 50647)》标准[18],车道宽度值一般在2.8~3.75 m之间,将该宽度范围放宽至2.6~4 m,并以3.5 m作为合理的车道宽度的中值,因此本文将R(θk)表示为式(8)。

(8)
式中:D为道路宽度;Δμ为该模型下车道宽度的估计值;k为车道数量;t1、t2、t3为正数。
3)车道信息提取。考虑到一段道路的车道数量并不是一直保持一致的,因此本文采用分段拟合的方法提取车道信息。该方法的思想将路段沿着道路中心线以一定间隔进行分段,对落入每个分段内的轨迹进行分析。如图6所示,以道路中心线节点为坐标原点,道路中心线方向作为坐标纵轴的方向建立直角坐标系xOy,计算目标点在以道路中心线为纵轴的直角坐标系中的相对坐标(x′,y′)。目标点为子路段内的所有轨迹点,将所有目标点在xOy坐标系下的横坐标值(x′)的集合作为高斯混合模型的输入值,采用EM方法对模型参数进行求解,并基于代价函数选择出最优车道数量k。
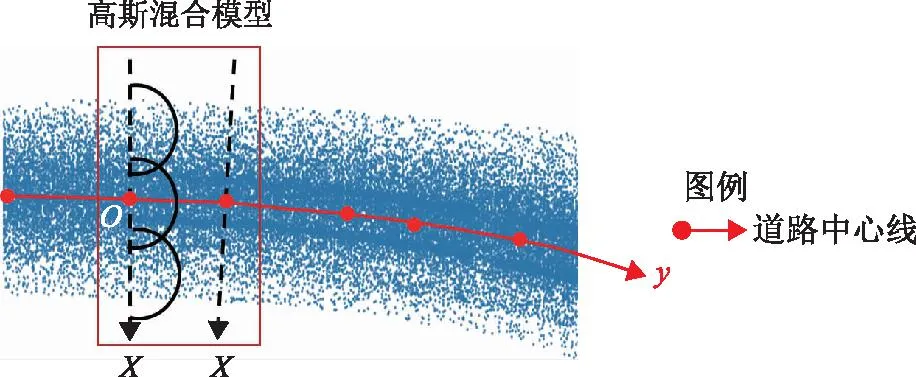
图6 分段车道信息提取
(9)
式中:α表示道路中心线的方位角;(dx,dy)是子路段内车道中心线节点在直角坐标系xOy中的相对坐标;dy为0,dx为高斯混合模型参数μj;(x1,y1)是原点坐标即距离目标点最近的道路中心线节点真实坐标。
2 实验与分析
2.1 实验数据及预处理
实验区域选择同济大学四平路校区周边,重点选择了28条双向道路(56个路段)使用某导航地图软件输出的导航轨迹,时间范围是2017年12月11日至2017年12月15日。为验证本文方法的精度,采用上海市测绘院全要素地形数据、遥感影像、公开地图(open street map,OSM)和百度街景地图作为真实参考数据。
考虑到实验采用的导航轨迹数据中混合着多种交通方式的轨迹,不适用于直接提取道路信息,因此本文首先基于文献[19]的方法对导航轨迹数据进行交通方式分类,并将其中的机动车轨迹用于车道信息的提取。本文将轨迹方向划分算法中的N值设置为8,minAzi设置为30°。数据清洗中邻域大小r1设置为5 m,密度阈值设置为整个路段轨迹点的密度的第5百分位值。核心点提取的阈值设置为该方向轨迹点F值的第5百分位值。车道信息提取方法中车道数量的取值设在2至5,代价函数中的λ为1,t1、t2和t3分别为0.1、1和50。
2.2 车行方向道路中心线提取结果
基于分类得到的机动车轨迹数据,在实验区域内选择部分路段进行车行方向道路中心线提取实验,结果如图7所示。可以看出,本文方法提取的道路中心线与OSM路网的道路中心线较为匹配,可以准确地反映出道路的不同车行方向,在道路弯曲的路段也能准确地表达车行方向信息。

图7 车行方向道路中心线提取结果
2.3 车道数量提取结果评估
考虑到道路可能会发生车道数量的变化,因此对56个路段分为3个位置(入口、中间和出口位置)进行验证,共有168个子路段的车道数量需要判定。车道数量提取结果如表2所示,其中车道数量真值来自遥感影像数据和百度街景地图,预测值为本文方法提取的车道数量。

表2 实验区域内的车道数量提取结果
对168个位置的车道数量进行评估,利用本文方法识别出134处与真实数据相符,正确率为79.8%。本文的方法对车道数量未发生变化的路段以及车道数量较少的路段(双向四车道)提取效果较好,部分车道数量变化的路段也可以准确识别。综上所述,本文方法可以准确判断大部分路段的车道数量。
2.4 车道中心线提取结果评估
1)车道中心线提取可视化效果。根据每个路段的最优车道数量对应的高斯混合模型参数和道路中心线节点反算出每个分段的各个车道中心线节点,连接车道中心线节点得到最终的车道中心线。在实验区域内随机选取4条道路(8个路段)评估车道中心线的提取结果。将4条道路的车道中心线提取结果与真实的车道中心线进行对比,真实的车道中心线来自上海市测绘院的全要素地形数据,结果如图8所示。从图8可以看出,本文方法提取的车道中心线基本上与实际的车道中心线位置一致,即使在车道数量发生变化的路段,也可以较为准确地反映出实际的车道分布情况。

图8 车道中心线提取结果
2)车道中心线精度评估。对提取的车道中心线结果进行精度评价,包括车道宽度精度以及车道中心线的位置精度。
车道宽度精度Wg的计算方法如式(10)所示。对路段的每个车道分别计算入口、中间和出口处的Wg,并将该路段的车道宽度精度均值作为最终的车道宽度提取精度(Wg_avg)。其中,Dg、Dr的定义如图9所示,分别表示车道宽度预测值和车道宽度真值。
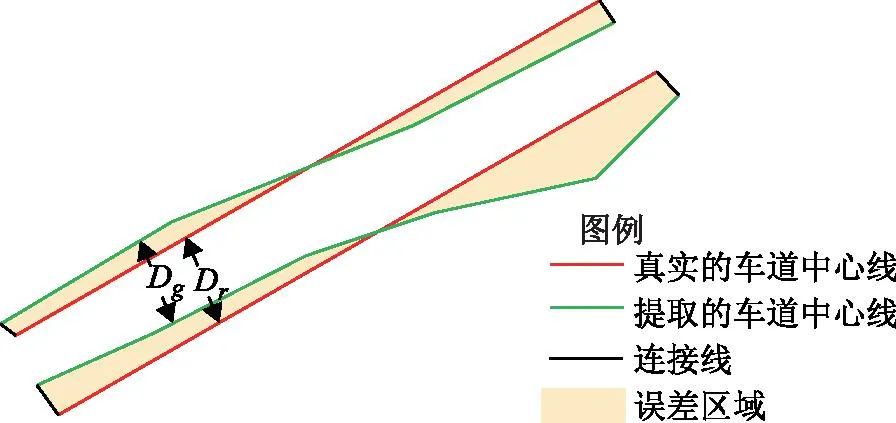
图9 车道中心线评价方法
Wg=|Dg-Dr|
(10)
车道线位置精度首先需计算每个车道中心线的位置精度Tg[20],具体方法如式(11)所示,将该路段所有车道的中心线位置精度的均值作为最终该路段的车道中心线位置精度(Tg_avg)。
Tg=|Ag/Lr|
(11)
式中:Ag为图9误差区域的面积;Lr为真实车道中心线的长度。
8个路段车道宽度精度以及车道中心线位置精度评价结果如表3所示。结果表明,实验路段中,大部分路段车道中心线的位置精度接近1 m,车道宽度精度优于0.5 m。其中部分路段位置精度相对较低(如四平路(国顺路→国权路)),可能是由于轨迹数据定位精度较差及某个车道车流较少等原因造成的。综上所述,本文的方法可以提取较为准确的车道信息,为车道级高精度地图的构建提供重要的补充。
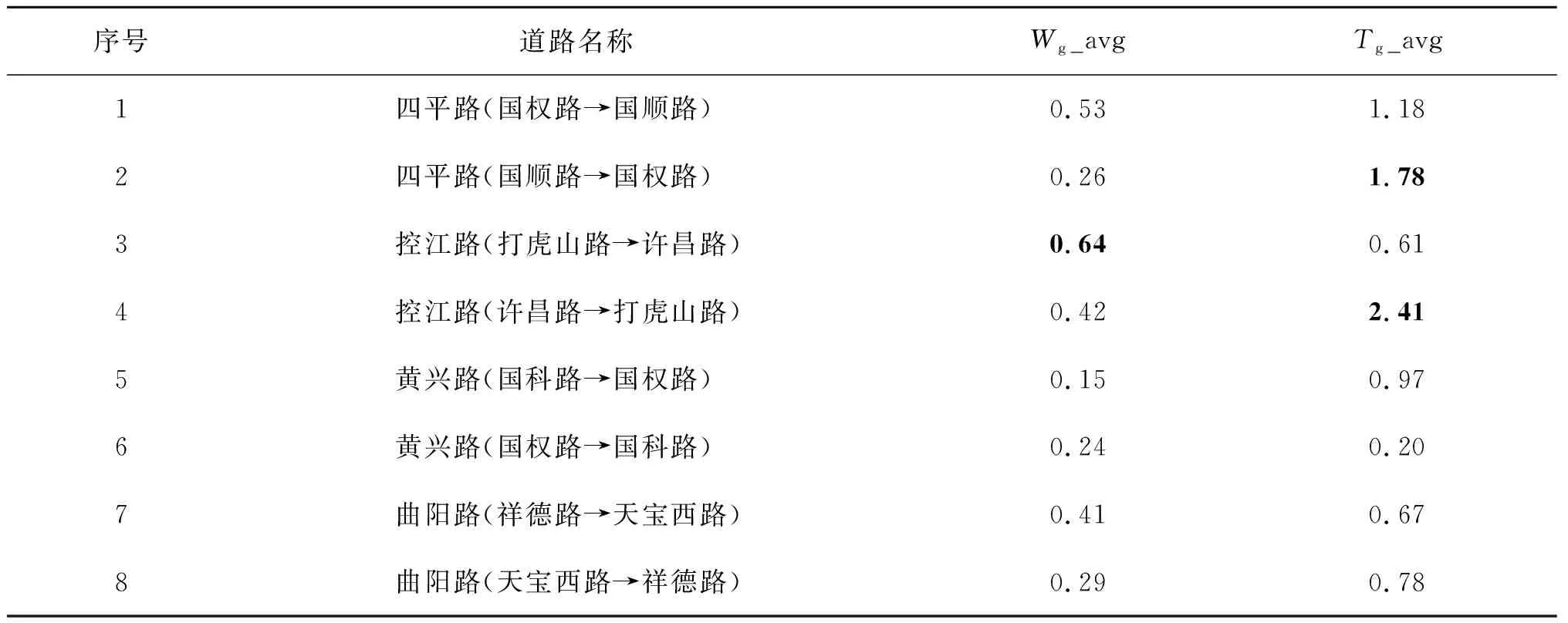
表3 实验区域内部分道路的车道中心线提取结果 m
3 结束语
本文提出了一种利用导航轨迹数据的车道信息自动提取方法,以准确获取车道数量和车道中心线。该方法首先利用自适应K-means聚类方法实现导航轨迹的方向划分,并基于轨迹的密度分布实现数据清洗;其次基于机动车轨迹在道路上的位置分布拟合车行方向道路中心线;最后采用约束高斯混合模型对机动车轨迹分布进行建模,提取车道数量和车道中心线。基于上海市的导航轨迹数据,本文选择了56个路段验证车道信息提取效果,结果表明,车道数量提取的正确率为79.8%。对其中8个路段验证车道中心线的提取精度,结果显示,车道中心线的位置精度接近1 m,车道宽度精度大都优于0.5 m。综上所述,采用本文方法提取的车道信息较为准确,可以为车道级高精度地图的构建提供重要的补充。然而,由于轨迹数据中缺乏高程信息,该方法不适用于高架等存在纵向道路重叠的区域,后续将考虑使用包含高程的数据进行扩展研究。
