基于红外监测的带式输送机托辊故障预警技术研究
2024-01-04刘永杰
刘永杰
(汾西矿业两渡煤业, 山西 灵石 031302)
1 带式输送机托辊结构及故障分析
带式输送机托辊布置间距在1 m 左右,整个断面布置至少3 个托辊,铺设1 km 长的带式输送机使用的托辊数量达到3 000 个。随着矿井开拓范围以及采掘深度增加,部分矿井单条带式输送机铺设长度超过10 km,沿线铺设的托辊数量超过3 万个,采用人工巡检方式时托辊故障排查难度大。带式输送机运行时托辊常见故障包括有卡涩、损坏、变形甚至异常高温着火等故障[1-3],托辊结构如图1 所示,托辊是由两个轴承构成的旋转机械,托辊的故障常与轴承密切相关。

图1 托辊结构示意图
托辊故障检查一般通过声学、热传导以及振动频率等实现。托辊正常运行时有其特定的声发射模式,可通过分析声发射信号实现托辊故障预警,但是存在信号分离以及感兴趣频率处理困难问题;当托辊运行时摩擦会产生热量,进而导致托辊局部结构单元温度增高,当托辊故障时会伴随有异常摩擦、温度升高特征,可使用不同温度阈值评估托辊故障状态,当检测托辊与邻近托辊温度相差5 ℃以上时托辊往往伴随有故障或者异常磨损问题;托辊运行时有其独特的振动频率,当振动频率出现异常时即可实现故障预警,但是也面临振动频率监测、分离难度大等问题[4-5]。由于温度监测相对容易且分析相对简单,提出采用红外摄像机获取带式输送机沿线托辊温度,并通过分析托辊温度分布实现故障预警。
2 故障预警方案
2.1 巡检方式
由于托辊固定在带式输送机机架上,位置保持不变,若实现带式输送机沿线各位置托辊温度监测,可采取下述方案:在带式输送机沿线托辊上布置传感器,实现托辊温度在线实时监测,此种监测方式存在传感器数量多、通信困难等问题,现场实时难度极大;在带式输送机托辊沿线布置感温光纤,通过感温光纤实现沿线温度监测,此种方式存在感温光纤容易损坏、温度异常点定位困难以及感温光纤铺设难度大、后续维护难度高等问题;采用红外摄像机沿着带式输送机往返移动,通过红外摄像机获取托辊位置红外图像并通过红外图形分析,实现温度监测以及故障预警。提出在带式输送机沿线布置巡检机器人并在机器人机身上布置红外摄像机,实现沿线托辊温度监测,具体巡检机器人在带式输送机沿线布置情况如图2所示。
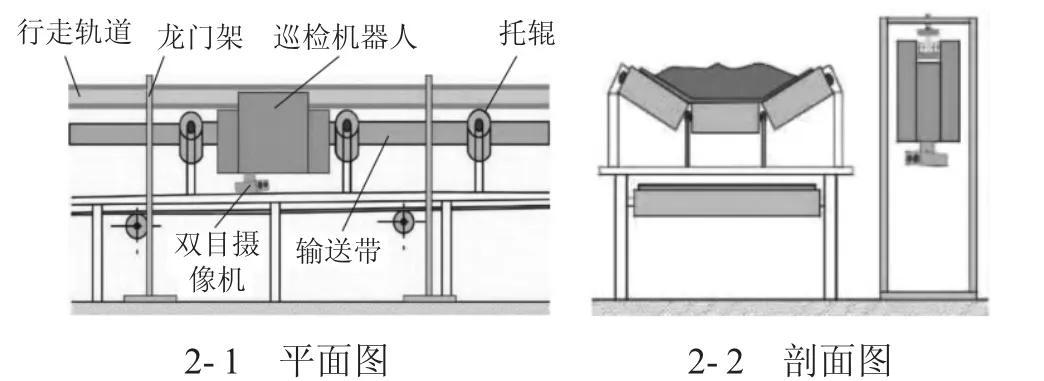
图2 巡检机器人布置示意图
具体使用的巡检机器人架构如图3 所示。巡检机器人布置不受地形影响,当适应井下复杂环境需要;同时巡检机器人可高速运行,提升检测效率并减少检查时间。

图3 巡检机器人结构及布置示意图
2.2 托辊温度监测
带式输送机托辊温度红外热成像监测如图4 所示,具体红外图像获取分为两个部分:第一部分是通过相应的光电探测器、光学组件等将探测目标的红外热辐转换成电压信号,电压信号大小与红外热辐射波长成正相关;第二部分是通过对应的图像电路板处理芯片,将电子信号转换成数字信号,并以视频图像方式在监视器上显示,获取可表征目标体温度分布的红外图像。
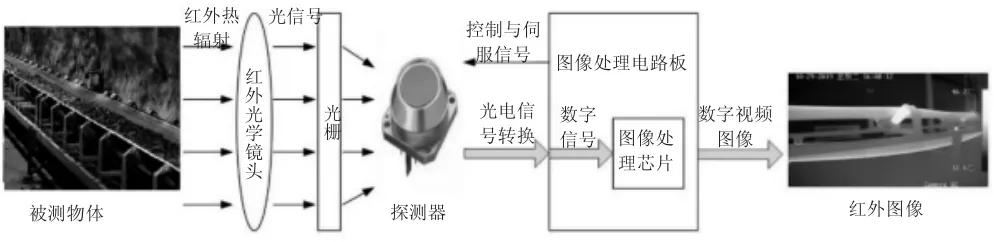
图4 托辊温度红外热成像监测示意图
巡检机器人上配备型号DJIZenmuseXT 双光谱红外热成像仪,该摄像机帧率为9 Hz、镜头为19 mm,可在高速运行情况下捕捉高清的红外图像;采用的红外热成像仪随机配备有非制冷的VOx 微测辐射计,可获取7.5~13.5 m 范围内的光谱,温度监测范围在-20~650 ℃。
2.3 通信方式
2.3.1 巡检机器人通信方式
通信系统是实现红外图像传输的桥梁,串行通信具备有成本低、传输线少优点,在远距离通信中应用较为广泛,具体常用的三种串行通信方式特性对比情况见表1。

表1 不同串行通信方式比对表
由于带式输送机沿线环境恶劣、干扰因素多以及数据采集多等,为此通信方式选用RS-485 方式,具体各传感器取到的数据通过RS-485 方式并按照Modus-RTU 通信协议传输给巡检机器人机载PLC,PLC 通过无线方式将数据传至上位机。具体巡检机器人上布置的各传感器类型、技术规格如表2 所示。具体信息采集通信过程如图5 所示。
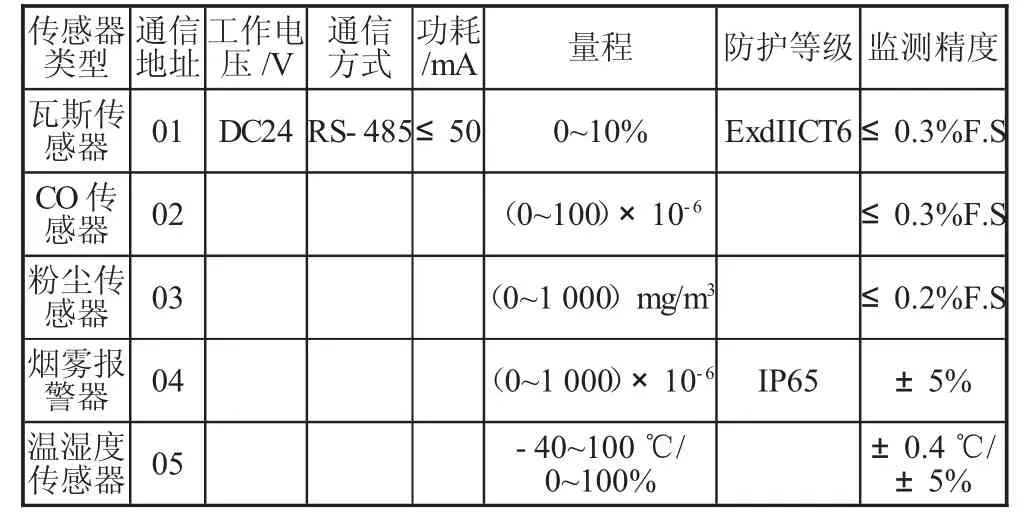
表2 传感器技术参数

图5 信息采集示意图
2.3.2 无线通信
无线通信是巡检机器人控制器、红外热成像仪与控制器、上位机间的通信方式,无线通信质量、速率会直接影响托辊故障预警系统运行效果。Wi-Fi技术具备有传输效率快、传输数据类型多等优点,为此无线通信选用Wi-Fi。
在带式输送机沿线布置多个无线通信分站以便实现无线信息全区域覆盖,各无线通信分站间使用有线方式传输,无线通信分站使用光纤与上位机通信;上位机可通过无线网络、光纤实现巡检机器人运行控制并获取红外热成像仪视频画面,无线分站技术参数如表3 所示。

表3 无线分站技术参数
3 试验分析
在山西某矿3506 运输巷带式输送机上进行试验,为确保试验安全,带式输送机为空载状态,运行速度设定为3 m/s;将部分正常托辊更换为卡阻托辊,并用红外热成像仪获取托辊表面温度,通过Python-OpenCV 图像处理模块实现红外图像处理。具体依据红外图像分析得到的托辊故障结果如表4 所示,托辊故障红外图像如图6 所示。
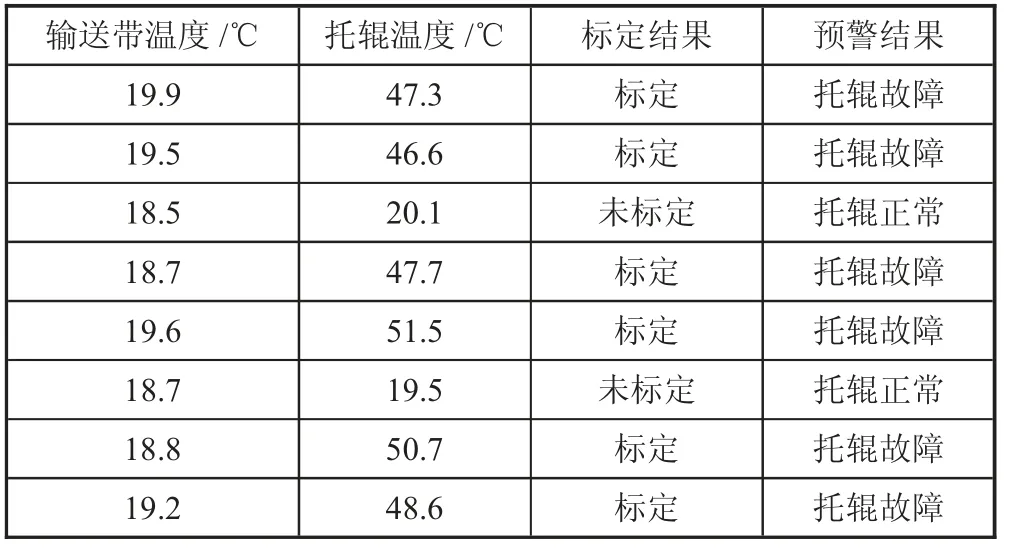
表4 试验结果

图6 托辊故障红外图像
通过现场试验发现,通过红外热成像仪采集获取托辊运行的红外热图像并进行处理,可实现托辊故障的标定,成功检测出卡阻托辊,而正常运行的托辊不标定,检测准确率达到100%。
4 结语
带式输送机铺设距离长、托辊数量多,为提高带式输送及托辊故障预警能力以及排查能力,提出综合使用巡检机器人、红外热成像仪对托辊故障进行预警。巡检机器人携带的各类传感器可实现带式输送机沿线环境检测,通过红外热成像仪获取托辊位置红外图像;监测数据传输采用Wi-Fi+光纤方式传输至上位机,上位机通过Python-OpenCV 图像处理模块对红外图像进行处理。在3506 运输巷带式输送机上现场试验表明,文中所提托辊故障预警技术可实现托辊故障预警,可在一定程度增强带式输送机运行安全保障能力。