六轴工业机器人结构轻量化设计与仿真分析
2024-01-04梁鹏丽
梁鹏丽
(吕梁高级技工学校, 山西 吕梁 033000)
0 引言
近几年,随着科学技术的持续发展,机器人应用范围持续扩大的同时,企业对于机器人性能及可靠性要求也在不断提升。在此情况下,六轴工业机器人作为当前应用最广泛的工业机器人,其在应用中存在因自重和电机质量过大而出现末端关节变形、运动过程抖动等情况,不利于保障机器人控制精准性。据此基于现有六轴工业机器人结构设计,采用有限元拓扑优化方法对机器人结构进行轻量化设计,对以上问题进行解决优化,将具有一定的现实意义。
1 六轴工业机器人有限元模型构建
根据六轴工业机器人结构构建几何结构模型,并根据构建的几何结构模型,将几何结构模型导入到有限元分析软件中,获取到如图1 所示的六轴工业机器人网格划分模型。此过程中共划分出12 248 个单元和12 239 个节点,并且F 点为模型最大载荷区域,设置载荷为5 N。底座设置固定约束条件。模型中黑色区域则为结构优化设计区域,而其他部分为非结构优化设计区域。

图1 六轴工业机器人网格划分模型
2 六轴工业机器人结构轻量化设计
在完成模型构建后,需要采用有限元拓扑优化方法进行六轴工业机器人结构轻量化设计,在此过程中需为有限元软件设置优化目标、设计变量以及约束条件。其中优化目标为结构质量最小;设计变量包括材料选择和结构形式;约束条件为极限工况条件下结构刚度与强度符合要求[1-2]。
2.1 材料
材料主要采用6061 铝和3D 打印 visijet_M2R_BK*。通过有限元拓扑优化软件分别采用两种材料实施材料质量优化对比分析和机器人末端位移分析。根据仿真分析结果可知,采用6061 铝材料的机器人末端位最大位移量为3.824 mm,优化后的最小结构质量为1.492 kg。
采用3D 打印visijet_M2R_BK*材料的机器人末端位最大位移量为3.987 mm,优化后的最小结构质量为0.971 kg。综合分析后可知,两种材料中3D 打印visijet_M2R_BK*材料优化后质量更小,并且机器人末端位移量仅略高于6061 铝材料对应的机器人[3-4]。
综合分析后确认六轴工业机器人结构轻量化设计采用3D 打印visijet_M2R_BK* 作为六轴工业机器人主体结构材料,此种材料的密度、弹性模量、泊松比以及屈服强度分别为1 200 kg/m3、2 250 MPa、0.35、85 MPa。
2.2 结构
两种极限工况分别为机器人完全水平展开和机器人关节90°旋转。对极限工况下六轴工业机器人现有结构进行有限元拓扑分析,进而获取到六轴工业机器人的6 个臂杆厚度分别为6mm、6mm、3mm、3mm、1.5 mm、2 mm。
基于有限元拓扑优化方法对两种极限工况下六轴工业机器人6 个臂杆厚度下机器人的等效应力和末端最大位移进行仿真分析,具体仿真分析结果如图2 和图3 所示。

图2 第一极限工况下六轴工业机器人等效应力(MPa)云图
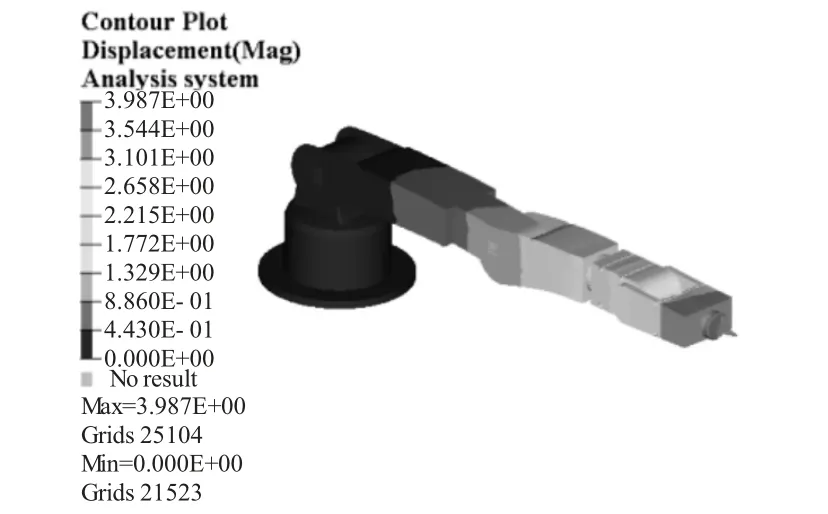
图3 第一极限工况下六轴工业机器人等效位移(mm)云图
如图2 所示,在第一极限工况下,采用结构优化设计的六轴工业机器人的等效应力分布区域主要为机器人各关节区域、末端区域以及机器人底座等区域,其他区域应力分布较小。其中,最大等效应力值为2.331 MPa,最大等效应力点为机器人末端区域。如图3 所示,第一极限工况下,采用结构优化设计的六轴工业机器人的等效位移分布特征表现出从末端到底座依次递减的特征。其中最大等效位移点处于机器人末端区域,最大等效位移值为3.987 mm。
在第二极限工况下,采用结构优化设计的六轴工业机器人的等效应力分布区域与第一极限工况下应力分布区域基本保持一致。其中,最大等效应力值为2.334 MPa,最大等效应力点为机器人末端区域。此外,第二极限工况下,采用结构优化设计的六轴工业机器人的等效位移分布特征表现出从末端到底座依次递减的特征。其中最大等效位移点处于机器人末端区域,最大等效位移值为3.987 mm[5]。
通过以上仿真分析结果可知,结构优化设计可满足六轴工业机器人正常使用需求,可在设计中沿用该结构设计。
总结分析后确认,六轴工业机器人结构轻量化设计中材料采用3D 打印visijet_M2R_BK*,结构设计中6 个臂杆厚度分别为6 mm、6 mm、3 mm、3 mm、1.5 mm、2 mm。
3 六轴工业机器人有限元仿真分析
根据六轴工业机器人结构轻量化设计对模型进行重构和网格划分,再根据网格划分结构实施模型仿真分析,具体分析结果如下。
3.1 第一极限工况
通过有限元分析软件对第一极限工况下优化六轴工业机器人强度与刚度进行仿真分析,进而获取到图4 和图5 中的仿真分析结果。
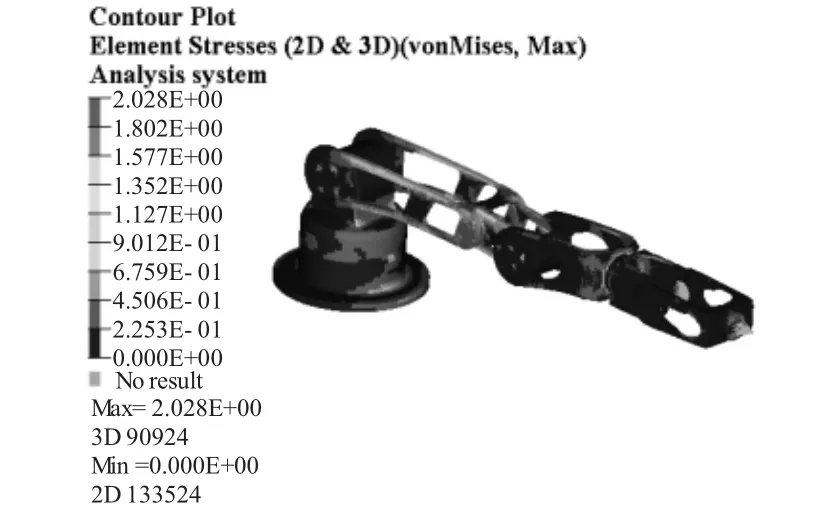
图4 优化后六轴机器人等效应力(MPa)云图
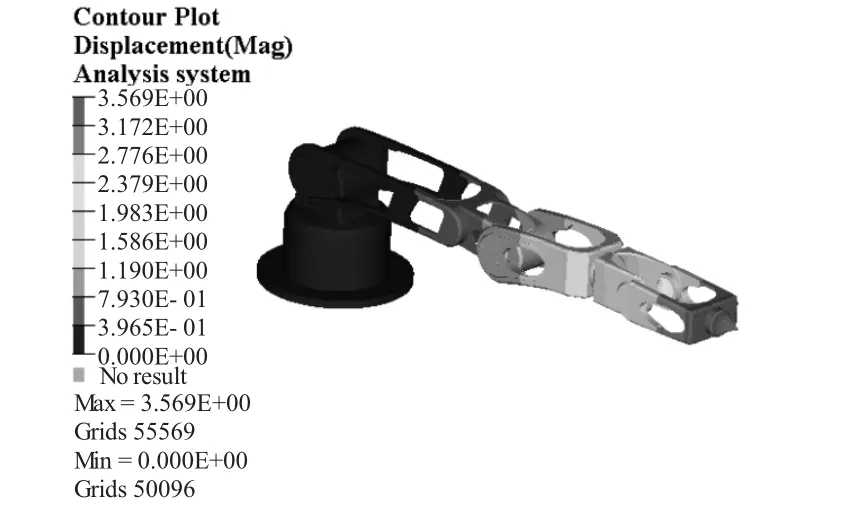
图5 优化后六轴机器人等效位移(mm)云图
如图4 所示,在第一极限工况下,优化后的六轴工业机器人的等效应力主要分布于关节区域和与底座相连接的臂杆区域。其中,最大等效应力值为2.028 MPa,最大等效应力点位于与底座相连接的臂杆区域。如图5 所示,第一极限工况下,优化后的六轴工业机器人的等效位移分布特征表现出从末端到底座依次递减的特征。其中最大等效位移点处于机器人末端区域,最大等效位移值为3.569 mm。
3.2 第二极限工况
在第二极限工况下,优化后的六轴工业机器人的等效应力主要分布于关节区域和与底座相连接的臂杆区域,同第一极限工况应力集中区域保持一致。其中,最大等效应力值为2.028 MPa,最大等效应力点位于与底座相连接的臂杆区域。此外,第二极限工况下,优化后的六轴工业机器人的等效位移分布特征表现出从末端到底座依次递减的特征。其中最大等效位移点处于机器人末端区域,最大等效位移值为3.949 mm。
综上所述,在两种极限工况下,优化后的六轴工业机器人刚度及强度均符合要求。
4 六轴工业机器人结构轻量化设计的工程应用
采用六轴工业机器人轻量化结构制作工业机器人,确认相较于原有六轴工业机器人,轻量化后的六轴工业机器人质量从原本的1.818 kg 下降至1.337 kg,减重0.481 kg,下降26.5%,满足六轴机器人轻量化目标。
同时,为进一步确认优化后六轴工业机器人的应用效果,还需将轻量化后的六轴工业机器人应与生产实践,进而在经过某工厂中为期3 个月的工程实践应用后发现,轻量化后的六轴工业机器人在某工程中应用期间各结构件均未出现明显变形情况,说明轻量化后的六轴工业机器人在减轻质量,降低制造成本的同时,也能够保障机器人的正常生产使用,具有较强应用价值。
5 结语
基于六轴工业机器人结构轻量化需求,结合机器人结构特点,介绍一种结构轻量化设计。此设计方案主要采用有限元拓扑优化法,从结构和材料两个方面进行轻量化设计,进而将获取到的轻量化结构设计分别采用有限元仿真分析和工程应用分析确认其应用价值,证明此六轴工业机器人结构轻量化设计可在后续工业机器人结构轻量化设计中进行参考应用。
