阀控缸系统参数辨识方法研究
2024-01-03张海洋
张海洋,梁 全
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
0 引言
阀控缸系统是电液伺服系统的一个重要分支,以输出功率大、响应速度快、控制精度高等优点被广泛应用于重型机械、工业制造和军事国防等领域[1]。但其本质是一种非线性时变系统,它存在的模型参数不确定性和非线性方程等因素严重影响了系统的控制性能[2]。为提高阀控缸系统的控制精度,建立精确的数学模型是基础。
目前,常采用的建模方法为实验建模法(系统辨识)、机理建模法以及两者的结合。姜万录等[3]根据非线性动力学原理,对电液伺服系统的动态特性进行了分析并指出线性模型很难精确表达系统的特性,建立系统非线性模型是十分必要的。黎波等[4]对某挖掘机电液比例阀控液压缸系统特性进行了分析,建立了非线性状态空间模型,但建模中忽略了系统参数慢时变特性和其他不确定干扰。由此确定机理建模法存在未建模动态特性,需采用系统辨识的方法来获得更加准确的系统非线性动态模型。麻玉川[5]对液压缸位置伺服系统的传递函数进行了系统辨识。王福斌等[6]采用RBF神经网络辨识了某液压挖掘机器人阀控缸系统的状态空间模型。韩桂华等[7]针对液压伺服控制系统的非线性建模问题,提出将L-M遗传算法与BP神经网络相结合的方法,解决模型中阈值和权值的修正问题,建立了电液伺服控制系统的数学模型。综上所述,采用非线性辨识方法能获得较高的辨识精度但辨识方法都是离线辨识,应用范围有限。本文在前人研究的基础上,将递推算法应用于阀控缸系统建模研究中,对含有未知参数的非线性数学模型进行实时估计,并借助MATLAB平台验证了递推最小二乘法具有收敛速度快、估计值准确的特点,可以获得精确的数学模型,适合于在线辨识与实时控制应用中。
1 阀控缸系统组成及数学模型
1.1 阀控缸系统组成
阀控缸系统由四通滑阀和非对称液压缸组成,负载考虑为质量、弹簧和黏性阻尼组成的常见动力机构,如图1所示。
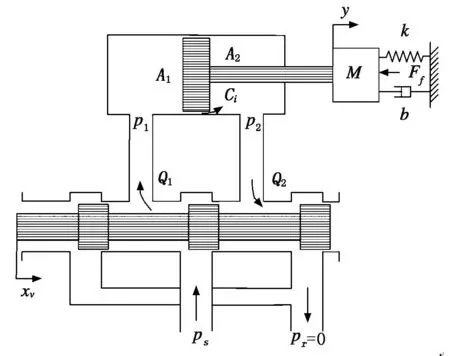
图1 阀控缸动力机构系统
1.2 阀控缸动力机构数学模型
(1) 四通滑阀流量方程:
(1)
其中:Q1为流入无杆腔的流量;Q2为流出有杆腔的流量;Cd为流量系数;w为阀芯面积梯度;xv为滑阀位移;ρ为油液密度;ps为供油压力;pr为回油压力;p1为无杆腔的压力;p2为有杆腔的压力;Δp1为无杆腔管路两端压力差;Δp2为有杆腔管路两端压力差。
(2) 液压缸流量连续性方程:
(2)
其中:V01为无杆腔初始体积;V02为有杆腔初始体积;βe为油液体积弹性模量;y为液压缸活塞位移;A1为无杆腔有效面积;A2为有杆腔有效面积;Ci为液压缸泄漏系数。
(3) 根据牛顿第二定律,液压缸活塞的受力平衡方程为:
(3)
其中:M为活塞和负载的等效质量;b为黏性阻尼系数;k为负载弹簧刚度;Ff为负载力。
(4) 将伺服阀考虑为二阶系统,则伺服阀的动态特性方程为:
(4)
其中:ωn为伺服阀固有频率;ξn为伺服阀阻尼比;kv为伺服阀电流增益;u为输入信号。

(5)
2 参数辨识方法
2.1 最小二乘法
最小二乘法在参数辨识领域中是应用最为广泛的方法之一,其主要是通过模型估计值与系统测量值之间的误差最小化来确定模型的参数。
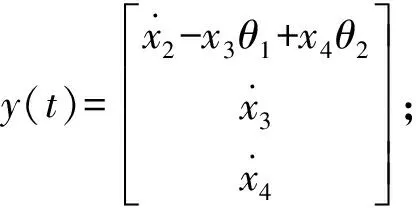
y(t)=Φ(t)θ.
(6)
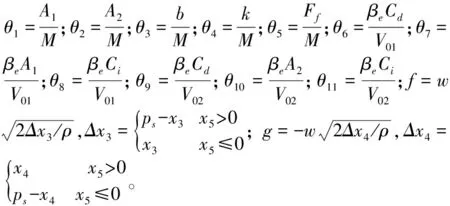
其中:
θ=[θ3θ4θ5θ6θ7θ8θ9θ10θ11]T;
Φ(t)=
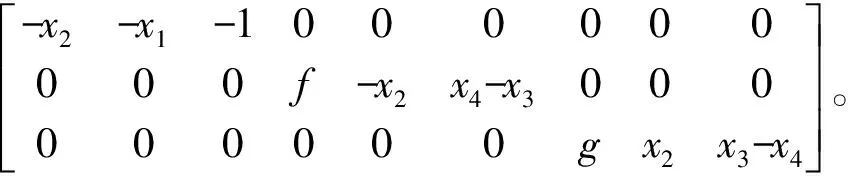
现对式(6)进行m次观测,并整理成如下矩阵形式:
Ym=Φmθ.
(7)
定义残差向量为Em=[e1,e2,…,em]T,则:
Em=Ym-Φmθ.
(8)
最小二乘估计是通过最小化残差平方和求得,定义准则函数为:
(9)
(10)
并定义协方差矩阵为:
(11)
2.2 递推最小二乘法
由于阀控缸系统模型参数存在时变性,导致对其实时控制时模型精度不高。为解决此问题,本文将递推算法应用于阀控缸系统辨识研究中,该算法是根据前一时刻估计值与当前时刻观测值进行递推计算得出新的估计值[8],具体算法如下:
(12)
且Km+1=PmΦT(m+1)[1+Φ(m+1)PmΦT(m+1)]-1.
(13)
Pm+1=Pm-Km+1Φ(m+1)Pm.
(14)

3 辨识仿真与结果分析
3.1 辨识仿真
辨识理论是与实践结合密切的理论,由于实际阀控缸系统模型的复杂多样性,研究人员需要进行大量的实验研究,才可能解决实际的建模问题。随着计算机技术的发展,对其辨识理论的研究通常以仿真手段进行。本文选择在MATLAB编程语言程序下建立阀控缸系统模型与辨识算法,具体通过开发阀控缸系统微分方程数值求解程序,为辨识理论提供采样观测数据,以及开发在线辨识算法程序,实现对系统模型参数的在线估计。仿真研究以阀控非对称缸系统为例,仿真过程中所采用的参数见表1,其辨识原理图如图1所示。

表1 阀控非对称液压缸系统基本参数
实验输入电压信号为u=sin(2πt),采样周期为1 ms,仿真时长t=4 s。辨识过程中的系统主要状态变量及微分数据如图2所示。
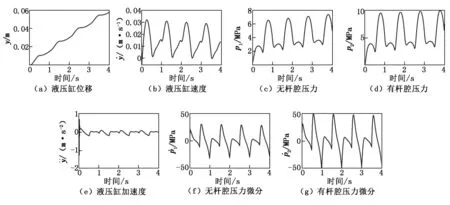
图2 系统变量数据曲线
3.2 结果分析
采用递推最小二乘法参数迭代收敛曲线如图3所示,实线是待辨识参数在线辨识估计值的曲线,虚线是待辨识参数设定值。
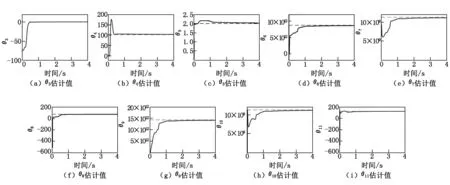
图3 参数迭代曲线
由图3可以看出:递推最小二乘法能准确收敛于被辨识参数的设定值,证明算法具有较高的辨识精度,可以提供精确的数学模型。
4 结论
本文以阀控非对称缸系统为例,通过MATLAB仿真获得待辨识系统的观测数据,并根据递推最小二乘法对含有待辨识参数的数学模型进行实时估计。仿真结果显示:该算法估计值曲线快速收敛于模型参数设定值,证明了算法具有收敛速度快、辨识精度高的特点,适合将其应用到实时控制中。
