基于数字微镜的高动态范围成像方法研究*
2024-01-03郑小钰杨赫然孙兴伟董祉序
郑小钰,杨赫然,孙兴伟,董祉序,刘 寅
(1.沈阳工业大学 机械工程学院,辽宁 沈阳 110870;2.辽宁省复杂曲面数控制造技术重点实验室,辽宁 沈阳 110870)
0 引言
随着现代科学技术的飞速发展,光学三维测量在产品检测、逆向工程、生物医学等众多领域得到了广泛应用。结构光三维测量技术利用相机采集投影仪向被测物表面投影的光栅图案来进行三维形貌测量,以得到物体表面点的三维空间坐标。但对于强反射物体表面进行三维测量时,其表面的局部镜面反射光容易导致相机采集的图像出现部分区域过曝光现象,造成被测物表面信息缺失的情况,从而影响测量精度。
数字微镜(Digital Micro mirror Device,DMD)是一种依靠数字电压信号控制微镜单元执行机械运动的器件[1,2],作为一种数字化光学调制器,具有很好的对比度和线性度。数字微镜上加载的图像是由每一个小镜片对应的像素所组成,通过对入射光线的调制,可以显示图像于像面上。
1 基于DMD的结构光三维测量系统
以结构光三维测量技术为基础,设计基于数字微镜的高动态范围测量系统,如图1所示,主要包括数字微镜及其控制面板、CCD相机、投影仪、TIR棱镜和透镜组。
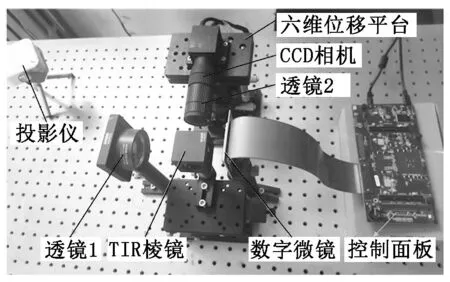
图1 高动态范围测量系统
DMD放置于CCD相机前,可以使进入相机的光线反射到不同方向;CCD相机和透镜2的光心水平,与数字微镜及透镜1所在的光心线相垂直且高度一致。系统选用DLP650LNIR 型号的数字微镜及MV系列工业相机作为图像采集器件。
对于本测量系统,DMD微镜单元与CCD相机像素单元之间可能未完全匹配,这是由于DMD芯片与CCD相机芯片的几何尺寸大小不同,且可能存在一定的角度偏差。利用莫尔条纹的位移放大特点[3],设计周期性条纹光栅图案,将图案上传到数字微镜中,能看到出现了莫尔条纹。手动调节CCD相机所在的位移平台和透镜组,直到条纹逐渐消失,说明DMD微镜单元与CCD相机像素单元之间已相互对应。
2 系统参数标定及相位计算
在测量系统的结构光测量部分,空间中任意一点的三维几何位置与其在图像中的坐标点存在一定的对应关系,为解算这种关系需要测定相机和投影仪的相关参数。采用传统的张氏平面标定法对相机和投影仪进行参数标定[4],选用不反光的棋盘格标定板作为标定物,使用procamcalib标定工具箱对棋盘格标定板和投影棋盘格一起联合标定。多次变换标定板所在平面的空间位置,同时相机在另一角度采集图像,从中选择10幅有效图像上传至工具箱中,通过识别并提取棋盘格中的角点解算相关参数,得到相机的投影误差为0.36像素,小于1像素,满足实验要求。系统标定过程如图2所示。
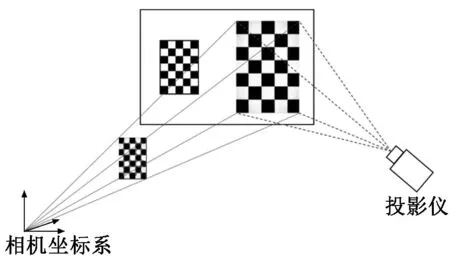
图2 系统标定示意图
在基于DMD的高动态范围测量系统中,结构光利用正弦条纹的相位信息进行三维计算,在相位提取时,所得的相位因反正切函数影响会被折叠在(-π,π)区间内形成包裹相位[5],为了还原其真实的相位信息,需要对包裹相位进行展开求得最终的绝对相位。格雷码编码加相移算法是目前使用较为广泛的时间相位展开算法,稳定性和可靠性强。它将相移技术和二元编码光栅相结合,设置格雷码最小周期与条纹图的周期一致,这样格雷码总是在截断相位处发生级次改变,从而把截断相位展开为连续相位。本文采用该方法进行相位计算,由计算机生成一系列正弦相移条纹图案和格雷码编码图案,投影仪向一个鼠标表面投射编码图案,CCD相机同步拍摄对应图像,然后对拍摄的图像进行解码得到结果如图3所示,可见该方法稳定性好,能够实现物体表面的相位展开。
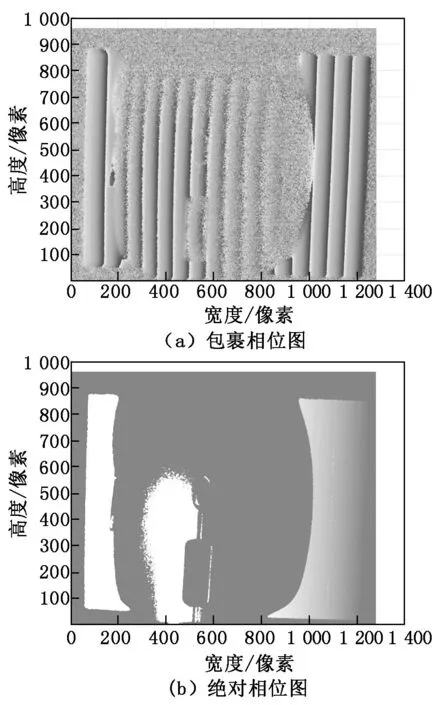
图3 相位计算结果
图3中横、纵坐标分别代表CCD相机拍摄的图像在水平方向和垂直方向的像素多少,即相机的分辨率为1 280像素×960像素。
3 高动态范围成像方法
若想要实现数字微镜对入射光线的精确调制,必须建立DMD微镜单元与CCD相机像素单元之间的坐标映射关系。BP神经网络是一种能学习和存贮大量的输入-输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程[6]。为加快训练速度,避免陷入局部极小值,提出一种白鲸优化算法(BWO)优化BP神经网络。该算法建立了探索、开发和鲸鱼坠落三个阶段,分别对应白鲸的游泳、捕食和鲸落行为。根据BWO对神经网络的权值和阈值进行优化,最后输出预测值。以棋盘格标定板图像中已知角点坐标作为输入量,相机实际采集到的图像角点坐标作为输出量,拆分(x,y)坐标分量,以双输入与双输出的方式进行神经网络学习。在训练结束后,以5×5的棋盘格图案作为评定掩膜进行精度验证,得到均方根误差为0.58像素。掩膜精度验证如图4所示。
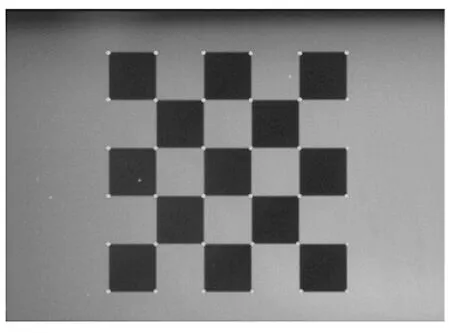
图4 掩膜精度验证
建立高动态范围成像系统的目的是测量强反射金属表面,在过曝光条件下获得高动态图像,那么就需要控制数字微镜芯片的开关状态,从而生成自适应掩膜。结合本测量系统提出一种基于PID控制器的掩膜生成方法。该方法将计算机看作PID控制器,输入相机采集到的原始场景信息x(n),输出DMD掩膜图案y(n),以当前输入和前一次采集的图像之间的偏差作为系统稳定条件。由于一张灰度图像的灰度值在0~255之间,为避免图像像素过饱和,应使像素点灰度值≤255,根据PID控制器原理,可得到输出的掩膜图案的计算公式为:
y(n)=255-[a·x(n)-b·x(n-1)].
(1)
其中:a、b均为简化系数。
将拍摄的图像代入到公式(1)中,系统达到稳定状态后生成掩膜图案导入到数字微镜中,可获得高动态范围图像。为验证该方法,使用搭建的高动态范围测量系统对强反射金属表面进行三维扫描测量实验,向一个钢质零件表面投射结构光。由于被测物表面的局部反射光使相机采集到的图像中出现了过曝光现象,导致表面信息获取不完整。利用基于PID控制器的掩膜生成方法根据输入的原始图像生成自适应掩膜,加载到数字微镜上,可以看到原始图像中过曝光区域被掩膜所覆盖,如图5所示。可见图中的像素点灰度值有所降低,零件表面的细节信息可以看清,这说明该方法有利于强反射表面的三维测量,增强了图像信息。
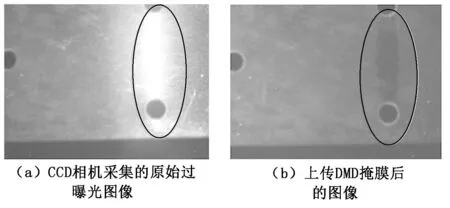
图5 DMD调制前后图像对比
4 结论
本文将数字微镜引入结构光测量光路中构成高动态范围成像系统,对系统进行匹配、标定和解算相位之后,建立了数字微镜与CCD相机之间的坐标映射关系。根据提出的自适应掩膜成像方法对强反射表面进行实验。实验结果表明数字微镜能够有效调制入射光线,使过曝光图像中的灰度值降低,进而实现对强反射表面的高动态范围成像。
