仿象鼻绳驱连续型机械臂结构设计及运动学分析*
2024-01-03冯家琪全伟才赵建豪许靖伟唐炫铭
冯家琪,全伟才,赵建豪,许靖伟,唐炫铭,刘 博
(湖南科技大学 海洋矿产资源探采装备与安全技术国家地方联合工程实验室,湖南 湘潭 411201)
0 引言
水下机械臂通常用来协助完成水下探测、打捞、狭窄区域救援等任务。传统刚性机械臂具有5个~7个自由度,能够实现稳定抓取,但其质量、体积较大,在水下应用范围有限[1]。随着机器人技术的发展,绳驱连续型机械臂掀起了研究的热潮,其由绳索带动柔性关节段进行弯曲,具有自由度数目多、机械臂段小巧、高灵活性和柔顺性等特点,可用于水下复杂狭窄的工作环境。
目前绳驱连续型机械臂多应用于陆地和太空环境,水下应用较少,而水下复杂狭窄环境对其轻量化设计有着更高的要求。Reynaerts D等[2]优化了连续型机械臂结构,利用绳索驱动机械臂,精简了机械臂上的元器件,但其自由度少,运动能力稍有不足。Simaan N[3]在绳索传动的基础上,将镍钛合金管作为柔性支撑,研制了绳索驱动的连续体机器人,其具有5个自由度,灵活度高,可完成多种复杂运动,但机械臂过于柔软,承载能力较弱。胡海燕等[4]设计了一种新型柔性仿生机器人,采用“无脊椎”柔性支柱,具有一定的承载能力和良好的弯曲性能。韦贵炜等[5]对连续型机械臂进行运动学分析,推导了机械臂三种工作空间的正向映射关系,为机械臂的控制设计打下基础。目前水下绳驱连续型机械臂在轻量化和狭窄环境通过性方面还需做进一步研究,本文将仿生学与绳驱连续型机械臂相结合,设计一款面向水下应用的仿象鼻绳驱连续型机械臂,其具有变直径、质量轻、效率高、绳索磨损小且受力均匀等优点。
1 仿象鼻绳驱连续型机械臂结构设计
仿象鼻绳驱连续型机械臂包括驱动模块和机械臂模块。机械臂模块由三段相似的关节段构成,各关节段由中心柔性支撑杆和支撑圆盘构成,中心柔性支撑杆的材料为玻璃纤维,每段关节的直径不尽相同,同圆盘一样从第一关节段至第三关节段逐渐减小,如图1所示。每段关节段由三根钢丝绳驱动实现连续型机械臂的弯曲和旋转,三段互相连接的关节段构成整个机械臂模块,可以实现“S”形弯曲或其他姿态。
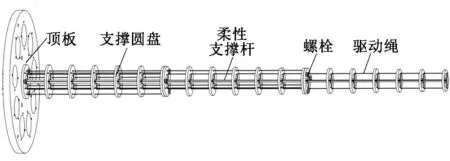
图1 仿象鼻绳驱连续型机械臂段整体结构
驱动箱整体结构如图2所示,驱动模块安装在机械臂底部,由伺服电机、结构支撑板(底板、中间板、顶板)、绕线轮以及过线轮等组成,驱动绳一头固接在绕线轮之上,通过电机驱动绕线轮转动带动驱动绳伸缩,另一头搭绕在过线轮之上进行90°换向并与对应机械臂关节固接,驱动绳与机械臂轴心的距离分别为18 mm、15 mm、12 mm。用双滑轮换向代替了滚珠丝杠机构,减小了驱动装置的重量和体积,且方便走线,减少了驱动绳与过线孔的摩擦,提高了驱动的精确度以及驱动绳的使用寿命。
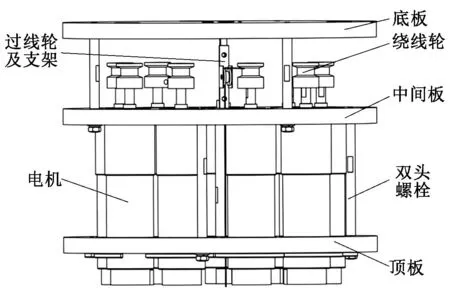
图2 驱动箱整体结构
2 仿象鼻绳驱连续型机械臂运动学模型构建
为确定机械臂的单关节运动学模型,将基坐标系固定在基座圆盘上,动坐标系固定在末端圆盘上,z0轴和z轴的方向分别垂直于基座圆盘和末端圆盘[6]。机械臂的弯曲与旋转运动可以看作是柔性支撑杆的自身弯曲自由度和绕着z0轴的旋转自由度,分别用θ和φ来表示弯曲角度和旋转角度,其运动范围为θ∈[0,π],φ∈[0,2π],仿象鼻绳驱连续型机械臂单关节运动学模型如图3所示。
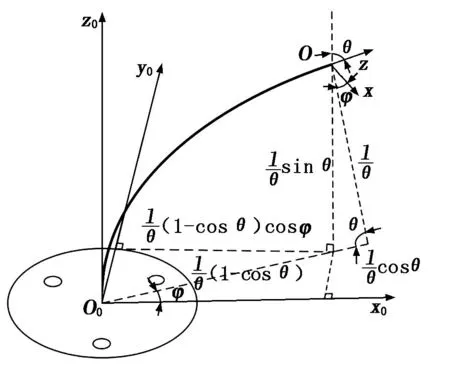
图3 仿象鼻绳驱连续型机械臂单关节运动学模型
2.1 驱动空间与关节空间映射关系
为进行关节间的解耦,提出一种补偿位移法来消除前一关节对后面关节驱动绳的影响,各关节单独运动时驱动绳的绳长变化量为:
(1)
其中:Δlji为第j关节第i号驱动绳的绳长变化量;rj表示第j关节段的驱动绳所在圆半径;θj为第j关节段的弯曲角度;φj为第j关节段的旋转角度。
多关节联合运动时后面关节驱动绳长变化量需要在本关节单独运动时的绳长变化量的基础上叠加前一关节角变换对本关节的影响,即:
(2)
正运动学求解为已知各段关节的绳长变化量,分析各关节段的关节变量θj(j=1,2,3)和φj(j=1,2,3),旋转角度和弯曲角度分别为:
φj=
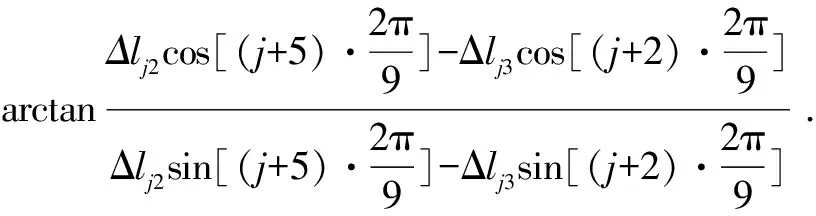
(3)
(4)
2.2 关节空间与操作空间映射关系
连续型机械臂每个关节的基坐标系与上一关节的末端坐标系重合,定义每个关节的弯曲角度和旋转角度分别为θj(j=1,2,3)和φj(j=1,2,3),则连续型机械臂多关节坐标变换的齐次变换矩阵为:
0T3=0T1·1T2·2T3.
(5)
其中,j-1Tj的表达式为:
(6)
其中:cφj=cosφj,sφj=sinφj,cθj=cosθj,sθj=sinθj,θj∈(0,π),φj∈[0,2π];l为机械臂单关节段的长度。
逆运动学求解为已知各段关节的末端位姿,分析各关节段的关节变量θj(j=1,2,3)和φj(j=1,2,3),使各关节齐次变换矩阵的各元素与已知末端位姿对应相等,得:
(7)
(8)
其中:az为末端坐标系z轴所对应的单位矢量;P为末端坐标系Oxyz的原点在基座坐标系O0x0y0z0中的位置矢量。
3 运动学仿真分析
为验证文中空间映射关系的正确性,进行了单关节、多关节解耦的运动学仿真分析[7],其中机械臂各参数如表1所示。
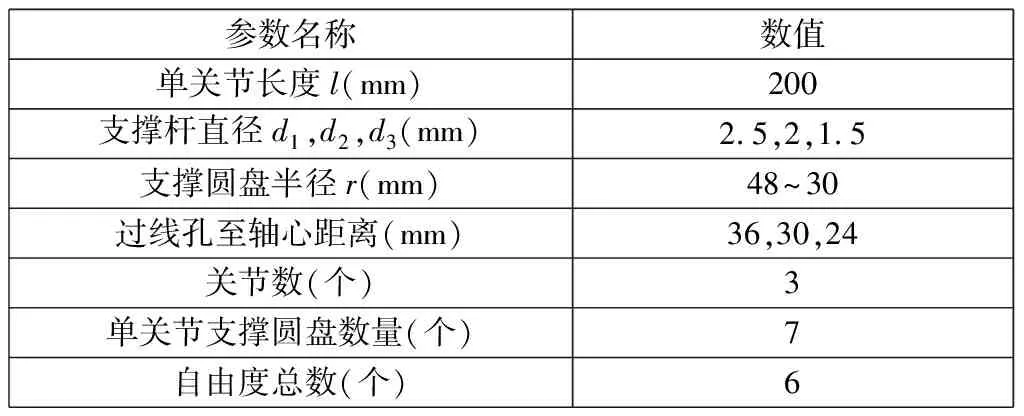
表1 仿象鼻连续型机械臂参数表
如图4所示,单关节在弯曲角度为[0,π]、旋转角度为[0,2π]的范围内运动,采样100次,得到各绳长变化量及末端位置变化曲线,其中绳长变化量小于0表示绳索收缩,大于0表示绳索伸长。仿象鼻连续型机械臂的弯曲旋转幅度越大,其各绳长变化量越大,三根绳索互相协同配合不断伸长缩短,而三根绳索的变化量之和始终为0。
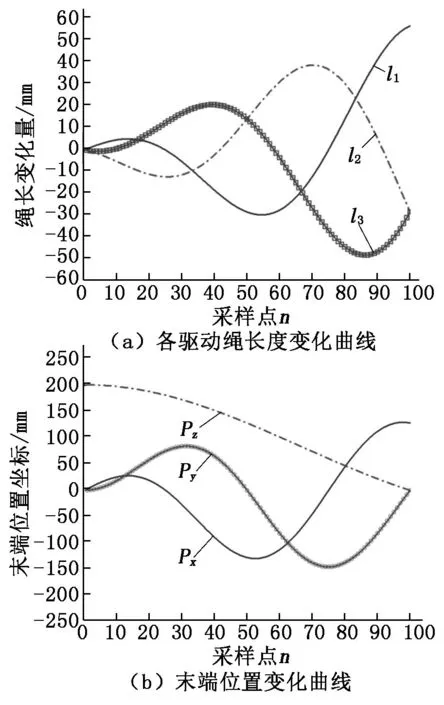
图4 单关节运动的绳长变化量及末端位置变化
由于绳索布置的因素,多关节运动时会产生耦合影响,需进行解耦分析。图5为三关节联合运动时绳长变化量和末端位置变化曲线。如图5所示,当两关节联合运动时,关节1、2和3均在弯曲角度为[0,π]、旋转角度为[0,2π]的运动范围内时,得到各绳长变化量以及末端位置变化曲线。各关节段的绳长变化量的变化趋势是相同的,而第2、3段关节叠加了第1段关节的运动,所以其三根绳索的长度变化量较第1段关节大,绳长最大变化量约为140 mm。
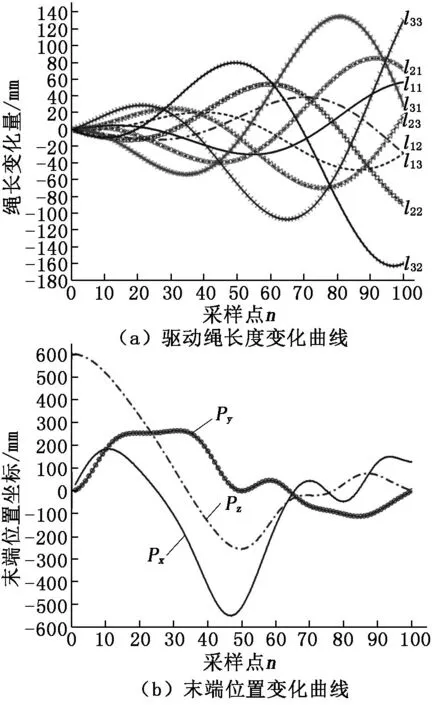
图5 三关节联合运动的绳长变化量及末端位置变化
4 结论
针对水下狭窄环境探测问题,设计了变直径仿象鼻连续型机械臂,将滚珠丝杠机构转化为双滑轮机构,优化了驱动箱的尺寸、走线及绳索的受力。建立了单关节、多关节的正、逆运动学模型,并在此基础上对多关节联合运动进行解耦分析和运动学仿真,结果表明:绳驱仿象鼻机械臂结构设计合理,具有较高的柔顺性及灵活性。
