基于COT-NGO-VMD与LSTM的变转速滚动轴承故障诊断*
2024-01-03胡明橙王莉静
郗 涛,胡明橙,王莉静
(1.天津工业大学机械工程学院,天津 300387;2.天津城建大学控制与机械工程学院,天津 300384)
0 引言
滚动轴承是保障大型旋转机械设备稳定运行的关键零部件之一[1],其健康状态对设备的运行起着十分关键的作用,一旦出现故障,便可能造成严重经济损失[2]。而在实际工程中,其常处于变转速工况[3],因此,对混合变转速工况下的滚动轴承故障诊断研究有很大的意义。
变转速滚动轴承振动信号通常具有非平稳性的特点,由HUANG等[4]提出的经验模态分解(empirical mode decomposition,EMD),可实现较好的自适应分解,但其仍为传统的递归模式分解,存在模态混叠等固有缺陷。李思琦等[5]使用集成经验模态分解(ensemble empirical mode decomposition,EEMD),通过引入白噪声后对原始信号进行EMD分解,在抑制模态混叠上有一定的效果,但由于加入了白噪声,系统分解时工作量变大的同时会使重构误差变多,且容易产生多个无关分量。张亢等[6]提出使用计算阶次跟踪(computed order tracking,COT),可有效地将非平稳的时域振动信号转变为平稳的角域信号进行分析,但信号仍存在部分噪声,故障特征不明显。DRAGOMIRETSKIY等[7]提出了一种非递归的分解模式:变分模态分解(variable modal decomposition,VMD),通过构建约束的变分问题并进行求解,克服了递归模式分解易出现的模态混叠与端点效应等问题。但VMD分解过分依赖模态分量K和惩罚因子α这两个重要参数,K和α的选取成为了问题的关键。闫敬敏、盛肖炜等[8-9]分别提出了使用扩展粒子群算法(extenden particle swarm optimization,EPSO)和鲸鱼算法(whale optimization algorithm,WOA)寻找VMD中的最优参数组合,但都存在易陷入局部最优且收敛速度慢的问题。刘前进等[10]提出COT与VMD分解融合并结合深度学习的方法,解决了变转速工况下故障特征难以提取的问题,但故障识别准确率较低。陈仁祥等[11]提出一种基于深度注意力迁移学习的方法,但在混合多种变转速工况时,存在故障识别准确率低的问题。周翔宇、张西宁等[12-13]分别采用一种改进型卷积神经网络(CNN)和改进深度卷积神经网络(DCNN)的方法对滚动轴承进行故障诊断,但随着网络深度的增加,会出现梯度消失和爆炸等问题。而长短期记忆网络(long short term memory,LSTM)依靠着其独特的机制,可有效避免上述问题的发生,准确率高。
综合上述分析,本文提出一种基于计算阶次跟踪(COT)、北方苍鹰优化算法(northern goshawk optimization,NGO)-变分模态分解(VMD)与长短期记忆网络(LSTM)相融合的算法,并基于某大学的变转速故障轴承数据集,以分类的准确率为评价指标,与上述的方法进行了对比分析。
1 计算阶次跟踪
计算阶次跟踪法(COT)是处理变转速工况下非平稳振动信号比较常用的方法,该方法通过以等时间间隔对振动信号和转速脉冲信号进行同步采样,根据转速脉冲信号计算得到旋转的相位信息,再采用数值插值算法对信号进行等角度重采样。
该方法可对不同转速下的振动信号以不同的采样频率进行重采样,其过程如图1所示。
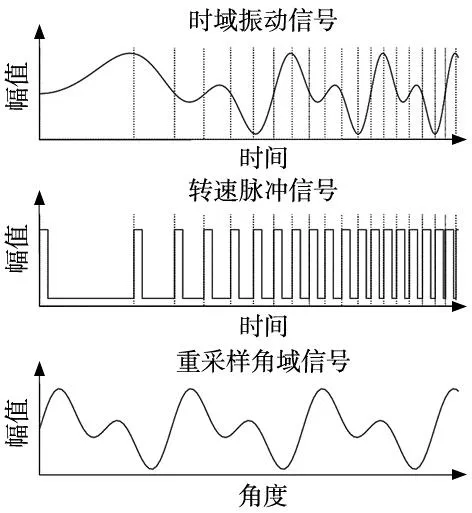
图1 阶次跟踪原理图
计算阶次跟踪法的关键是怎样选择合适的角度进行等角度重采样,也就是如何对等角度间隔重采样时刻的计算。经研究表明,在极短的时间内,速度的变化是均匀的[14],则转动角度θ可表示为:
θ(t)=a0+a1t+a2t2
(1)
式中:a0、a1和a2为待定系数,t为时间。
假设t0、t1和t2为3个连续的脉冲,在已知转动角度增量时,即可得到3个时刻的旋转角度和待定系数a0、a1和a2。并可得到任意两个脉冲间的转动角度θ与相应时间t的关系:
(2)
对旋转角度Δθ离散化,则第n个采样点的采样时刻可定义为:
(3)
根据所求的时间序列{Tn}对原始振动信号进行拉格朗日线性插值计算,即可得到平稳的角域信号x(Tn):
(4)
基于上述分析,变转速滚动轴承振动信号因转速变化而产生的负面影响能够被有效的消除。
2 基于参数优化的VMD信号特征提取
2.1 变分模态分解
VMD分解的本质就是建立约束变分问题再求解的过程。首先定义本征模态函数(intrinsic mode function,IMF)为调幅-调频信号uk(t),表达式为:
uk(t)=Ak(t)*cos(φk(t))
(5)
式中:Ak(t)是uk(t)的瞬时幅值,φk(t)是非递减的相位函数。
通过希尔伯特(Hilbert)变换,计算得出每个解析信号的单边频谱,再调整各模态函数预估的中心频率,将频谱调制到相应的基频带上,根据L2范数算出IMF的带宽,VMD分解是以所有带宽之和最小为约束条件,约束变分模型为:
(6)
式中:K为IMF的个数,uk为第k个IMF,ωk为第k个IMF的中心频率,δ(t)为狄拉克函数。

(7)
(8)
(9)
2.2 基于北方苍鹰优化算法的变分模态分解
在VMD的参数初始化的过程中,需要设置模态个数K,惩罚因子α,收敛误差ε和保真度系数τ。经实验表明,保真度系数与收敛误差的结果的影响可以忽略,故采用程序默认值。模态个数K与惩罚因子α的选取至关重要,当选取了不当的模态个数K时,会出现过度分解或分解不完整的情况,当选取了不当的惩罚因子α时,会对分解的速度和各分量带宽的大小产生影响。
本文将采用NGO对VMD的最优解进行全局搜索,以局部极小包络熵(minimum envelope entropy,MEE)为参数优化的评价标准,建立NGO-VMD参数优化模型。
2.2.1 局部极小包络熵
包络熵的大小直接反映了IMF分量信号的稀疏性,IMF分量中含有的噪声越多,与故障相关的周期性冲击成分越少,包络熵的值就越大,反之包络熵的值就较小。包络信息熵IMFEE(k)的表达式为:
(10)
式中:N为分解后的长度,pj为分解后归一化形式。
2.2.2 北方苍鹰优化算法
DEHGHANI等[15]提出一种通过模仿北方苍鹰的捕猎行为的新型智能优化算法,包括猎物识别与攻击(全局搜索)和追逐及逃生(局部搜索)两个阶段。
(1)猎物识别及攻击。在该阶段,北方苍鹰会随机挑选猎物并发起攻击,根据式(11)更新第j维的新状态,根据式(12)更新种群成员:
(11)
(12)
(2)追逐及逃生。在苍鹰发起攻击后,猎物产生反抗,苍鹰继续追逐猎物,因其超高的飞行速度,任何情况下都可狩猎成功。正是模拟了这种行为,使该算法在空间局部中的搜索能力很强,通常假设其在半径为R的范围内进行狩猎。首先根据式(13)更新搜索半径R,根据式(14)计算第j维的新状态,根据式(15)更新种群成员。
(13)
(14)
(15)

2.2.3 NGO-VMD模型
采用NGO算法对VMD参数进行优化的流程图如图2所示。
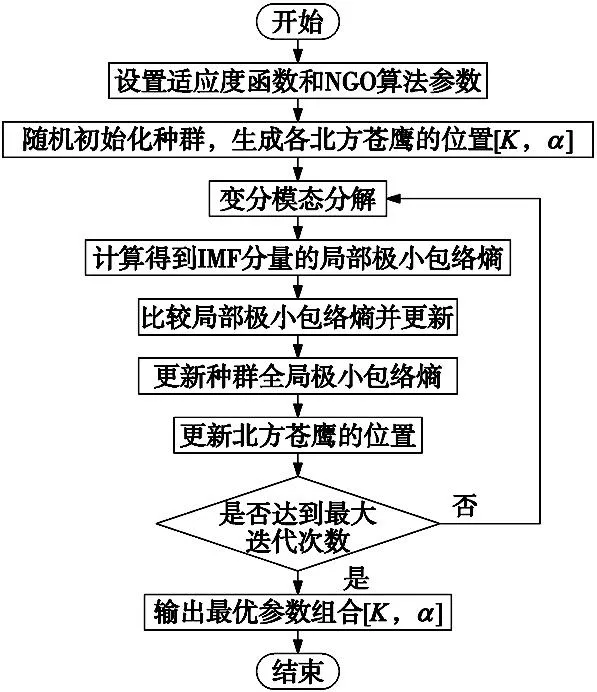
图2 NGO-VMD流程图
具体步骤为:首先确定NGO算法所需参数N和T,初始化北方苍鹰的位置,即VMD算法中的参数[K,α],确定北方苍鹰的猎物目标即适应度函数为局部极小包络熵,计算各个北方苍鹰的适应度值,获得种群的最小值,更新北方苍鹰的位置,对最小包络熵进行全局搜索,达到最大迭代次数,输出北方苍鹰的最佳位置[K,α]。
3 长短期记忆网络
长短期记忆网络(LSTM)[16]是在拥有高精度处理时间序列的循环神经网络(RNN)的基础上被提出来的,在其基础上加入了输入门、忘记门和输出门,利用了门机制来控制特征的流通和损失,引入了一种具有选择性记忆能力的记忆细胞。记忆细胞可对前一级神经元中的杂乱部分有效去除,能更有效的存储有效信息,减少对记忆的压力,从而提高了处理输入序列的速度。表达式为:
ft=σ(Wf·[ht-1,xt]+bf)
(16)
it=σ(Wi·[ht-1,xt]+bi)
(17)
(18)
(19)
ot=σ(Wo·[ht-1,xt]+bo)
(20)
ht=ot×tanh(Ct)
(21)
式中:σ为sigmoid函数,Wf、Wi、Wc和Wo分别为遗忘门、输入门、输入节点和输出门的权重矩阵,bf、bi、bc和bo分别为遗忘门、输入门、输入节点和输出门的偏置。
4 基于COT-NGO-VMD-LSTM的滚动轴承故障诊断模型
本文采用COT算法对滚动轴承变转速振动信号进行重采样,转为角域平稳信号,再采用NGO-VMD融合算法解决了因VMD参数选取不当而导致的故障特征难以提取的问题,并通过计算MEE确定含有故障信息最多的IMF分量,最后结合LSTM网络,实现变转速滚动轴承的故障诊断。故障诊断模型的具体步骤为:
步骤1:获取滚动轴承在变转速工况下外圈和内圈故障以及健康的振动信号;
步骤2:通过COT算法获得相对平稳的角域振动信号;
步骤3:通过NGO算法以MEE为适应度函数对VMD的参数进行寻优,得到不同故障信号的最优参数组合[K,α];
步骤4:使用优化后的参数组合对不同故障类型的重采样角域信号进行VMD分解,得到若干模态分量;
步骤5:将包络熵值最小的分量做FFT得到阶次谱,取低阶的阶次谱值作为故障特征向量,并随机分为训练集和测试集;
步骤6:将训练集的样本输入到LSTM模型中,获得训练好的LSTM诊断模型;
步骤7:将测试集的样本输入到训练好的LSTM预测模型中进行测试,实现对滚动轴承故障的诊断分类。
5 实验验证
为验证本文所提方法在混合多种变转速工况下的滚动轴承故障诊断是否有效,选用某大学的变转速故障轴承数据集,包含4种变转速(加速、减速、先加速后减速和先减速后加速)条件下3种健康状况(健康、内圈故障和外圈故障)的数据,由加速度计和编码器以200 kHz的采样频率持续10 s采集型号为ER16K的深沟球轴承的振动信号和转速信息,轴承的基本参数如表1所示(fr为转动频率)。
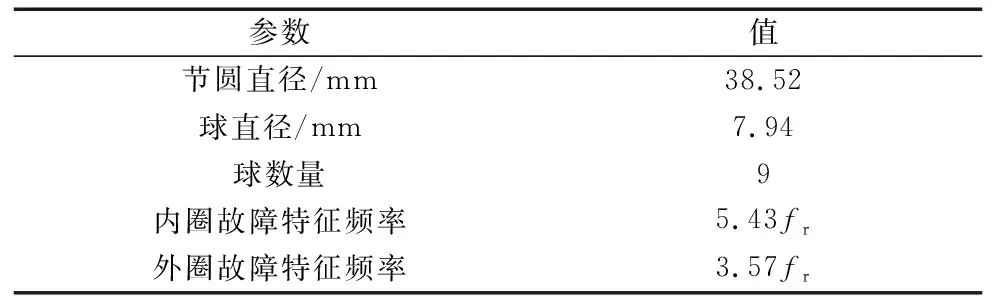
表1 轴承参数
为验证COT-NGO-VMD提取故障特征的有效性,选取内圈故障的轴承在加速工况下的信号,截取2 s的数据进行测试,振动信号时域图和轴承转速图如图3所示。

(a) 时域 (b) 转速图3 原始振动信号
重采样后的角域信号和阶次谱图如图4所示。

(a) 角域 (b) 阶次谱图4 重采样信号
由图4可知,因无关阶次与故障阶次的幅值差距较小,导致故障信息很难被提取到,所以需要对信号进行进一步的处理。分别采用扩展粒子群算法(EPSO)、鲸鱼算法(WOA)和北方苍鹰算法(NGO)对VMD分解的参数进行寻优,设定算法的最大迭代次数和种群规模分别为30和15,惩罚因子α和模态个数K的寻优范围分别为[200,5000]和[1,15],各算法的具体参数设置如表2所示,各算法迭代更新过程中MEE值的变化过程如图5所示。

表2 各算法参数设置

图5 各算法的迭代曲线 图6 最佳分量的阶次谱
可以看出,WOA-VMD算法收敛相对较快,但存在收敛精度不高的问题,EPSO-VMD算法的收敛精度较高,但存在收敛较慢的问题,而NGO-VMD算法在收敛速度快的同时又保证了收敛精度很高,优于其他两个算法。根据NGO算法求出的最优参数组合对COT算法重采样后的角域信号进行VMD分解,依据MEE得到的最优IMF分量的阶次谱如图6所示。
可以看出,本文使用的COT-NGO-VMD算法,无关阶次冲击较小,故障阶次幅值较为突出,说明了该方法在提取故障特征方面的有效性。
为验证LSTM分类效果的准确性,将数据集的信号随机截取4096个点为一个样本,4种变转速(加速、减速、先加速后减速和先减速后加速)条件下3种健康状况(健康、内圈故障和外圈故障)各200条数据,共2400条数据组成新的数据集,通过COT-NGO-VMD对新的数据集进行分解,并将最优IMF分量的阶次谱值的前256个点作为特征向量,并各取70%作为训练集,30%作为测试集,输入到LSTM网络模型中进行故障诊断。其参数如表3所示。

表3 LSTM网络参数设置
将上述算法所提取的故障特征向量训练集输入到LSTM网络中进行训练,其准确率和损失值曲线如图7所示。

图7 LSTM网络训练准确率和损失值
观察图7可知,本文所提方法的收敛速度较快,诊断准确率较高。将测试集输入到已训练好的LSTM网络中进行测试并与其他两种方法对比,各算法模型的诊断结果如图8所示,相对应的故障类型为:1为正常;2为内圈故障;3为外圈故障。

图8 各诊断模型的准确率
由图8可知,在单一工况下,各模型都有较高的准确率,当轴承处于加减速混合工况时,本文所提方法的故障识别准确率明显高于其他两种方法,平均故障识别率为97.78%,证明COT-NGO-VMD-LSTM故障诊断模型在对变转速混合工况下的滚动轴承进行故障诊断与分类时具有良好的效果。
6 结论
(1)本文通过COT算法对滚动轴承振动信号进行重采样,得到平稳的角域振动信号,便于后续分析。
(2)通过NGO优化算法确定VMD分解的参数,对角域信号进行分解,可有效的提取到故障特征。与EPSO算法和WOA算法进行对比,试验结果表明本文所采用的方法无论是在速度上,还是在故障特征的提取上,均具有明显优势。
(3)通过LSTM神经网络,实现对变转速滚动轴承的故障诊断与分类。并采用加拿大渥太华大学的变转速故障轴承数据集进行验证,结果显示,基于COT-NGO-VMD-LSTM的故障诊断模型对滚动轴承在多种变转速混合工况条件下的故障识别率为97.78%,明显优于其他两种模型,为滚动轴承在变转速工况下的故障诊断提供了新的方案。