基于迭代和扰动观测的间隙实时补偿控制研究*
2024-01-03郭联龙蒋路明廖连杰
桑 勇,郭联龙,蒋路明,廖连杰
(大连理工大学机械工程学院,大连 116024)
0 引言
电动伺服加载系统主要应用于模拟承载机构在实际加载过程中所受的真实载荷。该系统中存在的传动间隙和不确定性扰动,使得载荷输出不理想[1]。传动间隙的存在会导致电动伺服系统出现动态响应延迟、相位滞后现象,甚至还会出现冲击现象[2]。科研人员对传动间隙的非线性补偿进行了大量地研究。
对于传动间隙,SURANENI等[3]设计了模糊自适应控制器用以补偿间隙。DINH等[4]使用基于间隙的迟滞数学模型的非线性自适应控制策略对间隙进行补偿。SELMIC等[5]采用神经网络反演法对间隙进行估计,并对其补偿。KANG等[6]对间隙导致的系统响应迟滞问题,对间隙的逆模型设计扰动观测器,估计系统间隙并对其补偿。LYU等[7]结合模糊逻辑系统提出建立模糊模型描述不确定间隙的非线性,然后通过线性项和类扰动项对模糊模型解模糊化和逼近。在国内,马艳玲等[8]设计了通过在线评估的状态反馈自适应控制器,对间隙进行补偿,适用于参数不确定的系统。赵建周等[9]比较了直接补偿、BP神经网络补偿、换向补偿3种控制算法的有效性。赵月[10]分析了间隙对系统输出响应的影响,采用迭代算法对间隙进行辨识,并基于最速下降法的自适应间隙逆模型对其进行补偿。肖前进等[11]为了提高电动舵机系统的跟踪精度,首先对间隙非线性进行模型辨识,构建出系统间隙模型,并通过逆模型方法对间隙进行补偿控制。张星荣[12]是针对伺服系统的间隙问题提出了一种基于观测器的控制方案,对系统状态和扰动转矩进行估计。这些控制策略有着不错的鲁棒性和较快的响应速度,但是需要精确的系统模型或对控制器的运算速度有着比较高的要求。
本文借助于迭代学习算法和扰动观测器设计了滑模控制器,对传动间隙进行了补偿,同时提高了系统的鲁棒性。
1 系统数学模型
本节对电动伺服加载系统进行分析,分别建立永磁同步电机和传动系统的数学模型。
电动伺服加载系统的示意图如图1所示,该装置包含控制器、永磁同步电机、减速器、电动缸、力传感器、光栅尺、承载机构。该电动伺服加载系统的工作原理为:控制器对电机下发指令信号,电机旋转,旋转运动经过减速器后驱动电动缸做直线运动,并对承载机构施加载荷,同时力传感器和光栅尺检测加载力的大小,并将其运动状态反馈到控制器。间隙存在的主要位置在承载机构的安装前端,如图1所示。

图1 电动伺服加载系统示意图
图1中,c和bt为阻尼系数,k1和k2为刚性系数,Mt为等效质量,PMSM为永磁同步电机。
1.1 永磁同步电机数学模型
永磁同步电机自身具有非线性、多变量、强耦合的特点,因此在搭建数学模型时做出以下假设[13]:
(1)不计算铁芯的磁滞、涡流的损失;
(2)不计算电枢反应;
(3)不计算转子阻尼效应;
(4)三相绕组和永磁体磁场呈正弦分布。
在上述假设的基础上可以写出永磁同步电机在d-q坐标系下的电压方程为:
(1)
式中:ud和id分别是d轴上的电压和电流分量,uq和iq分别是q轴上的电压和电流分量,Rs为定子电阻,Ld和Lq分别是d轴和q轴定子电感分量,ωe为电角速度,ψf为永磁体产生的磁链,ψd和ψq分别为d轴和q轴上的磁链。
在d-q坐标系下的磁链方程为:
(2)
电磁转矩由两部分组成,一部分为永磁体于定子绕组磁链之间相互作用,另一部分为磁阻变化,而表贴式永磁同步电机不存在磁阻变化。本次实验采用表贴式永磁同步电机(Ld=Lq),因此电磁转矩方程可以写为:
(3)
简化后的电压方程可以表示为:
(4)
采用矢量控制的方式控制该永磁同步电机,通过控制定子电流iq,进而控制电磁扭矩的大小,其电流内环流程图如图2所示。

图2 永磁同步电机电流环控制流程图
则带有电流环的永磁同步电机开环传递函数可以近似的表示为:
(5)
永磁同步电机的机械运动方程为:
(6)
式中:Jt=J1+J2,bt=be+bm,J1为电机转动惯量,J2为丝杠等效至电机输出轴上的转动惯量,bm为电机阻尼系数,be为丝杠等效至电机轴上的阻尼系数,TL为负载转矩,θm为电机机械转角。
1.2 传动系统数学模型
分析图1可得传动系统的平衡方程为:
(7)
式中:Mt为等效总质量,c为阻尼系数,k1和k2为刚性系数,xd为理想状态(所有机构不发生形变)下电动缸输出的位移,xm为电动缸输出端实际运动的直线位移,i为减速器减速比,LS为滚珠丝杠导程,η为传动效率。
针对式(7),取:
(8)
(9)
则xd和θm的关系式为:
xd=αθm
(10)
以迟滞模型为基础,分析间隙对系统额外作用力的影响如式(11)所示。间隙的整个作用过程可以分为两个阶段:间隙内输出死区阶段和间隙外阶段。但是在系统运行过程中,间隙作用阶段的判断较为困难,因此使用在线辨识的方式对其补偿。
(11)
式中:xδ为间隙输出位移,2bδ为间隙大小。
带有有间隙影响的系统平衡方程为:
(12)

(13)
(14)
2 间隙补偿控制器设计
本节基于积分滑模控制对系统设计了带有迭代学习和扰动观测的滑模控制器。其控制原理为:利用迭代学习和扰动观测器实时对间隙模型进行辨识,并将辨识结果作用至滑模控制器,完成对间隙的补偿控制。
2.1 迭代滑模控制算法设计
定义误差为e=yd-y,设计滑模面为:
(15)
式中:s为滑模面,λ1和λ2为正常数。
对式(15)求导可得:

(16)
设计滑模等效控制律为:
(17)
(18)
式中:0<μ<1,Γ为迭代学习增益系数。
2.2 扰动观测器设计
为了提高传动间隙模型参数估计的准确性,需在迭代学习对间隙的估计值上进行修正。
式(14)中,传动间隙中f的估计量已由迭代算法给出,现使用扰动观测器对迭代学习后的间隙模型进行纠正,并进一步提高系统的鲁棒性。
为方便参数处理,将式(14)转化为:
(19)
在式(19)的基础上设计了如下扰动观测器[15]:
(20)

(21)

(22)
所以,估计误差可以收敛到0。
2.3 稳定性验证
取Lyapunov函数为:
(23)
对式(23)求导,则:
(24)
将式(16)代入式(24)得:

(25)

3 仿真实验分析
本节通过仿真实验证明了SMC-ILC&NDOB控制算法的可行性,并与传统的PID控制算法相比较,验证了该控制算法的有效性。
3.1 仿真参数设定
为验证SMC-ILC&NDOB控制策略的可行性和有效性,通过MATLAB/Simulink软件搭建该系统仿真模型,使用Runge-Kutta方法进行仿真实验。永磁同步电机采用矢量控制的方式,其原理如图3所示。

图3 永磁同步电机矢量控制结构框图
Park变换和Clark变换能够实现对电机电流和电压的坐标变换。为控制三相逆变器桥臂MOS的通断,需要SVPWM计算永磁同步电机在各扇区的作用时间,扇区作用时间计算方式成熟,不再赘述。
传动机构及承载机构的仿真模型参照2.2节的状态空间表达式在Simulink中搭建。仿真模型如图4所示。

图4 永磁同步电机矢量控制仿真模型
系统中PMSM设定参数和传动机构的刚性、阻尼设定参数表1所示,控制器参数如表2所示。系统初始状态为x=[0 0 0 0]T。

表1 仿真系统参数表

表2 控制器参数表
3.2 仿真结果及数据分析
输入幅值为1000 N、频率为0.2 Hz的正弦信号,分别使用传统的PID控制器和SMC-ILC&NDOB控制器进行测试。
图5为只使用迭代学习对传递间隙模型参数的估计结果,从图中可以看出,在第5次迭代的时候出现了“过冲”现象,随着迭代次数的增多,“过冲”现象更加明显。该现象是电机在变换转动方向期间系统的跟随性差,跟随误差大,迭代值逐渐累积造成的。为保证系统稳定性,设置迭代值上限为6000 N。所以只有迭代学习估计值是不满足控制器的设计需求的。

图5 迭代学习对间隙模型辨识效果图 图6 迭代和扰动观测作用下间隙辨识效果图
扰动观测器在抑制“过冲”现象地出现方面有着明显的优势,如图6所示,加入扰动观测器后,传递间隙的估计值不再会出现瞬间过大的现象。总体来说,迭代学习和扰动观测器对间隙的估计值是比较准确的。
经过100次迭代学习之后,该控制方法的输出信号如图7所示。相比于传统的PID控制,SMC-ILC&NDOB控制方法有着更快的响应速度,能够率先跨越间隙,并且没有明显的过冲现象;跨越间隙后能够在50 ms内达到稳定,并且加载力跟随的准确度更高。
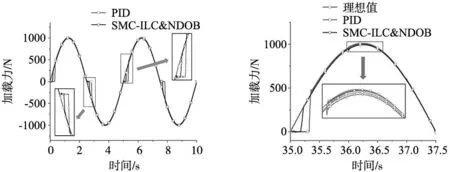
图7 PID与SMC-ILC&NDOB控制效果对比图 图8 PID和SMC-ILC&NDOB鲁棒性对比图
为了验证该控制算法的鲁棒性,在36 s时对系统施加一个扰动,扰动持续时间为1 s(如图8所示)。PID算法的仿真模型受到扰动后,发生了轻微地抖动,抖动0.45 s后恢复稳态。SMC-ILC&NDOB算法的仿真模型受到扰动后,加载力发生了突变,但是发生突变后能够快速地恢复到稳态值,这也表明:相较于传统的PID控制算法,该控制算法有更好的鲁棒性。
4 结束语
通过研究分析可以得出,迭代学习算法和扰动观测器能够较好地估计间隙的模型参数,为滑模控制器提供了更加精确的控制参数。相比于传统的PID控制方式,采用基于迭代学习和扰动观测器的滑模控制算法,对于传动间隙有着不错的补偿效果,同时该控制算法有更好的鲁棒性。