基于MIMO滑模的气动伺服系统控制
2024-01-03王潇孔建寿
王潇, 孔建寿
(1. 南京理工大学 自动化学院,江苏 南京 210094;2. 河北省农业生产资料集团有限公司,河北 石家庄 050041)
0 引言
气动伺服系统凭借安全可靠、构造简单等优点,广泛应用于工业、农业等自动化领域[1-2]。但是由于空气的可压缩性、气阀特性以及气缸的摩擦等因素,使得气动伺服系统的非线性较高,从而给气动系统的精确控制带来了较大的困难[3]。同时,气动系统在工作中的一些外部扰动也会对其跟踪性能产生影响。因此,保证气动伺服系统跟踪控制的性能,对于气动系统的安全稳定运行有着至关重要的作用。
针对气动系统的控制,国内外学者已经进行了相关研究。SMAOUI等[4]对基于气缸的伺服系统进行了建模,并采用Backstepping算法实现了系统的位置控制,但是算法应用依赖于较为精确的系统模型,抗干扰能力不足。许翔宇、林黄耀、刘凯等采用LM算法对气动系统的PID控制器参数进行整定,以提高系统响应,降低系统震荡,基于PID的策略同样也有相关应用[5-7]。虽然基于PID的方法不需要精确建模,但是系统的抗扰动能力不足。为了提高气动系统的抗干扰能力,SHEN[8]采用滑模控制(sliding model control, SMC)策略,实现了气动伺服系统的高性能跟踪控制。在滑模控制的基础上,进行算法的改进,同样提高了气动系统的鲁棒性[9]。其他基于自适应控制以及自抗扰控制技术的气动系统,同样取得了较为出色的系统跟踪控制能力[10-14]。
以上的气动伺服系统通过控制器的设计都实现了较为出色的跟踪控制效果,但是系统主要进行位置跟踪,未对气动系统的柔顺性进行探讨。由于气体的可压缩性,气动系统具有内在柔顺性。YI等[15]提出可以通过气压的调节,实现气动系统输出柔顺性的整定。所以本文在进行轨迹跟踪的基础上,进行气动系统柔顺性的控制,实现系统的多输入多输出(multiple input multiple output, MIMO)。
本文针对气动系统非线性的问题,提出采用MIMO SMC算法实现气动伺服系统位置跟踪和柔顺性控制。首先对气动系统进行基于流量控制策略的建模,然后将状态空间转换为严格反馈系统形式,在此基础上进行SMC控制器的推导,最后通过仿真平台对所提方法进行验证。
1 气动系统动力学模型
基于气缸的气动伺服系统如图1所示。其中,气缸左右两个气腔独立工作,单独由两个比例流量阀进行控制。两个气腔内的压力共同作用于活塞上,压力差作用下产生运动力。

图1 气动伺服系统
该气动伺服系统的动力学方程为
(1)
式中:M为传动传输杆上的总质量;δ为活塞相对于平衡位置的距离,正向为图1中的右向;τext为外部驱动力;P1和P2分别为左、右两侧气腔内压力;Sa表示气压力的作用面积,即活塞的面积。由动力学方程可知,对活塞的运动控制实际上是由左、右气腔压力的控制实现的。该驱动过程通常是采用比例压力阀,经过直接调节内腔压力来实现。该驱动策略简单直接,但是以压力快速响应为前提,忽略了内腔压力变化的过程以及系统的动态效果。本文采取第二种驱动方式,即流动控制,通过比例流量阀调节进入气腔的气流量,进而实现对腔内压力的动态跟踪,这一过程的气体动力学描述为
(2)

(3)
本文是通过气流量的调节实现对压力的调节,气流量的调节过程为
(4)
式中:Ai表示比例流量阀的阀门开度,即为模型系统的控制输入,Ai=-1表示阀门全开放气,Ai=1表示阀门全开充气。所以Ai∈[-1,1];Λi(Pu,Pd)为最大流量,是由上游压力Pu和下游压力Pd决定的,具体计算公式如下:
(5)
式中:C为气流常数;ρ0为气体密度;b为压力系数;T0为环境空气温度;Tu为气源空气温度,一般两个温度取相同。当充气时,上游压力Pu为气源压力,下游压力Pd为气囊内部压力;放气时,上游压力Pu为气囊压力,下游压力Pd为环境气压力。
式(1)—式(5)描述了整个气动伺服系统的非线性动力学模型。为了便于进一步研究控制算法,将整体系统模型用状态空间模型进行描述。
(6)
(7)
(8)
结合式(6)—式(8),气动系统的非线性状态空间模型描述为
(9)

(10)
(11)
对于系统输出,除了进行常规要求的轨迹跟踪,本文还增加了用于描述柔顺特性的输出量,即(P1+P2)/2。根据动力学方程可知,气缸活塞的运动控制是通过(P1-P2)的压力差实现的,而在保证压力差的情况下,压力P1和P2仍然可以自主调节。当P1和P2整体值较低时,气体可压缩性较高,活塞对外可表现出较低的刚度;反之,活塞对外可表现出较高的刚度。所以通过(P1+P2)/2的控制,可实现不同刚度表现。
最终构建式(9)所描述的系统模型,可以看出,这是一个非线性双输入、双输出的系统。所以本文采用MIMO SMC来对气动系统进行控制。
2 MIMO SMC算法
2.1 坐标转换
算法的研究在式(9)所描述的状态空间模型上进行,但是为了规范化推导过程,一般需要将状态空间模型转换为严格反馈的形式。所以本文进一步使用Lie导数算子,对式(9)的模型进行坐标转换,Lie导数的计算为:
(12)
(13)
(14)
由式(14)可推得
(15)

2.2 MIMO滑模控制
针对式(15)所描述的状态空间模型,构建针对轨迹和气压的两个滑模面为
(16)

(17)
为了便于分析,将滑模面导数中的向量和矩阵用符号代替为:
(18)
(19)
(20)
在式(17)的滑模面导数基础上,选用经典的等速趋近率,构造系统的输入为
(21)
满足k1>0和k2>0。由得到的系统输入和滑模面,可计算得Lyapunov方程的导数
(22)
因此,针对非线性气动系统,基于MIMO SMC得到的系统双输入能够使得系统满足轨迹跟踪和基于平均压力的柔顺性控制需求。
3 仿真分析
3.1 系统参数和仿真平台
在已经建立的气动系统模型和MIMO SMC控制算法的基础上,本文在Simulink环境下进行仿真验证,为后续的应用奠定基础。其中为了模拟实际应用中的驱动物体实现往复运动,仿真设定伺服系统驱动质量为2kg。建模过程中涉及的其他模型参数如表1所示。

表1 系统仿真参数
基于选定的参数,建立如图2所示的仿真模型。
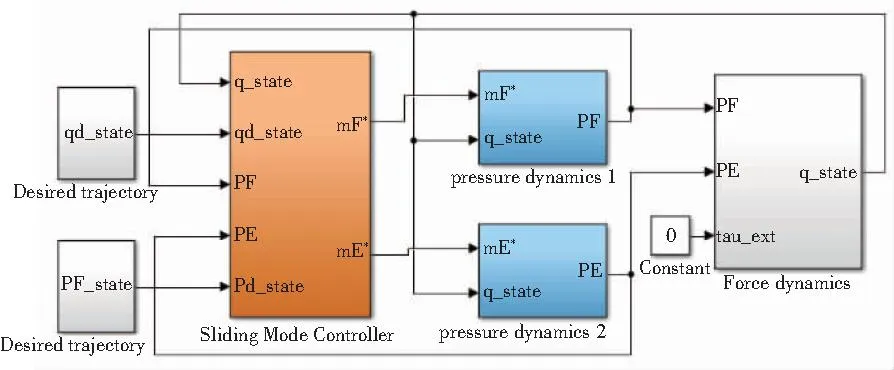
图2 Simulink环境下的仿真模型
图2中,分别给定期望轨迹和期望的用于柔顺控制的压力,经过MIMO SMC模块后,得到两个比例流量阀的开度,同时在此刻状态下,进一步计算得到输入到两个气腔的流量。在输入流量下,由气压动力学计算的气腔内压,进而作用于活塞面,实现活塞杆的运动。
对于轨迹跟踪,根据实际应用中往复的运动,以正弦信号为期望轨迹,具体给定幅值50mm,频率1Hz和2Hz的正弦信号。其中,对于气动系统,2Hz的正弦信号对于检测系统性能具有重要意义。对于压力,给定一个斜坡信号序列,以检测系统在满足轨迹跟踪的同时,还具有柔顺性调控的性能。
3.2 仿真结果和分析
正弦信号的轨迹跟踪结果如图3和图4所示。其中,虚线为期望轨迹,实线为实际跟踪轨迹。从图中的对比可以看出,本文提出的算法能够使得气动系统准确地跟踪上期望信号。需要注意的是,仿真环境中的误差相对于给定信号值数值较低,可以忽略。虽然仿真是比较理想的工作状态,但是本文仿真系统的参数都是根据实际工作系统设定的,且通过相关测定后给定,可以反映系统的真实性。

图3 1Hz正弦信号跟踪

图4 2Hz正弦信号跟踪
2Hz的信号对系统的响应性能要求较高,从图4可以看出,系统仍能够稳定跟踪上2Hz正弦信号,跟踪效果并未下降。
在保证轨迹跟踪性能的基础上,同时保证平均压力的控制,对于给定的压力斜坡信号,跟踪效果如图5所示。

图5 压力斜坡信号跟踪
从图5中可以看出,在初始50kPa稳定均压后,系统能够以斜坡的形式升压到100kPa并保持稳定,在保证系统轨迹跟踪效果的情况下,系统的刚度提升,柔顺性降低。稳定后,在6s时,系统能够对坡度更大的压力进行控制;在7s时,压力进一步升高到200kPa,此时系统达到一个较高的刚度,将会对外部位移干扰产生较高的恢复力。
根据轨迹跟踪和压力控制的仿真结果可以看出,本文所提算法能够对构建的气动伺服系统实现多输入、多输出的控制。
4 结语
本文在对非线性气动系统进行完整建模的基础上,采用MIMO SMC算法对系统轨迹跟踪及柔顺性进行同时控制,最后在搭建的仿真平台上对系统进行了仿真分析,结果表明本文所提方法在保证轨迹跟踪效果的同时,也实现了系统柔顺性的压力控制。整体工作为后续的应用奠定了基础。
