一种中小型船舶检测爬壁机器人吸附能力研究
2024-01-03冯玉勇管殿柱宋新城王宪辉邓皓云
冯玉勇, 管殿柱, 宋新城, 王宪辉, 邓皓云
(青岛大学机电工程学院, 山东 青岛 266071)
爬壁机器人是特种机器人的一种,能够在复杂、恶劣、极限环境下代替人工实现各种作业任务,具有重要的研究意义和应用价值[1]。爬壁机器人的吸附性能是在复杂表面上安全移动的关键,因此,爬壁机器人的力学形成机理和分析受到了广泛关注[2]。由于爬壁机器人具有稳定高效的性能,已成为船舶、化工和风电行业检修[3]工作中大型非结构设备的首选装置。自1966年,日本大阪府立大学的西亮教授制作了一台垂直壁面移动机器人的原始样机,爬壁机器人的研究和发展经历了多个阶段,涌现出了多种类型和结构的爬壁机器人,如永磁轮式、真空吸附履带式、多足行走式、超高压水射流清洗除锈式等,此类爬壁机器人各有其优缺点和适用范围,需要根据不同的工作场景和需求进行选择和设计。本文设计研究了一种履带永磁吸附式机器人,分析工作时的力学特性,并对设计的永磁吸附单元进行仿真,根据仿真结果验证机器人的工作可靠性。该机器人主要用于船舶检测领域[4],用于船体结构可能存在的失效状况时,提高船舶的工作可靠性。该机器人能够高效安全地完成作业,覆盖船舶甲板、船壁及外部船体等位置,通常高度达到几十米[5]。与其他类型的爬壁机器人相比,该机器人具有永磁吸附单元,能够提供稳定且可调节的吸附力,适应不同厚度和材质的金属表面;履带式结构能够增加接触面积和摩擦力,提高行走稳定性和抗干扰能力;轻便紧凑的设计能够降低重量和功耗,提高运行效率和灵活性。
1 机器人结构设计
爬壁机器人主体结构包括机架和机架两侧对称分布的4对履带轮结构,底部和履带轮内部分别设置永磁吸附装置,爬壁机器人结构如图1所示。爬壁机器人采用四履带结构,可提高越障能力,爬壁机器人既要平稳移动,又要对壁面的凸起等复杂障碍物做出及时反应,所以越障能力是设计爬壁机器人需要解决的难题之一[6]。

图1 爬壁机器人结构
爬壁机器人永磁吸附装置放置方案如图2所示。与一般永磁履带式爬壁机器人相比,机器人整体的运动灵活性得到提高,而且永磁吸附单元[7]的自由安装拆卸可以使机器人根据工作壁面的不同,自由简单地调节所需要的吸附力,并在转向能力上比一般机器人更灵活。
2 力学特性分析
在设计爬壁机器人结构时,应考虑机器人防仰和防滑[8]问题,机器人在壁面工作时,会因吸附力不够而向下滑动,或移动到壁面过渡处时发生侧翻,这些问题容易造成机器人损坏及安全隐患,所以需要对以上2种情况进行力学特性分析[9]。
当爬壁机器人吸附在壁面时,船壁可近似看作竖直壁面,由于爬壁机器人在船壁上是垂直作业,所受的重力G也是竖直向下,2组主动轮同时受到来自壁面方向且垂直于壁面的2个支持力N1和N2的影响。由于爬壁机器人在船壁工作时有向下滑动的趋势,所以还受到来自壁面2个静摩擦力f1和f2及永磁吸附装置提供的吸附力F的影响。爬壁机器人受力情况如图3所示。
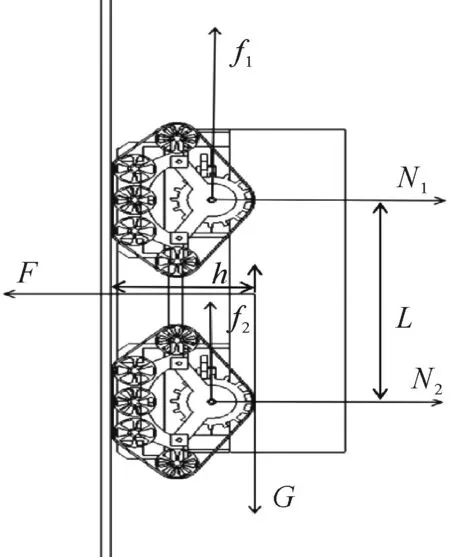
图3 爬壁机器人受力情况
1) 爬壁机器人因吸附力不够而向下滑动。为防止爬壁机器人在工作时发生向下滑动的情况,在壁面上能平稳完成工作,船壁与爬壁机器人之间的静摩擦力必须大于或等于平行于壁面方向上的所有外力总和,因此保证机器人工作平稳性条件为
(1)
根据图3所示,在没有任何负载的条件下,爬壁机器人的重力G=100 N,当静摩擦力f1+f2=1 200 N时,机器人不会发生向下滑动的情况。履带材质为橡胶材质,所以按橡胶与钢质壁面的滑动摩擦系数μ=0.6计算[10],得到的吸附力F=60 N。
2) 爬壁机器人发生纵向倾覆情况。爬壁机器人会因为沿着壁面方向的力矩之和不为零而发生纵向倾覆情况[11],图3中h为机器人重心O与壁面之间的垂直距离,L为2个主动轮中心之间的距离,为使机器人不发生倾覆情况,沿着壁面的机器人所受到的力矩之和为零,考虑到机械可靠性设计原则[12],还要施加一个安全系数K,因此爬壁机器人所需要的吸附力需满足如下条件,即
(2)
式中,K为安全系数,K=1.6;u=0.5;h=30 mm;L=140 mm,代入式(2)得,吸附力F≥571.2 N。
综合以上分析结果,为使爬壁机器人保持工作可靠性,永磁吸附装置提供的吸附力至少需要571.2 N。
3 永磁吸附装置设计
3.1 永磁吸附单元结构设计
爬壁机器人的吸附能力作为重要技术指标,采用的磁性材料决定了吸附能力的高低,结合爬壁机器人的工作环境,选择的磁性材料应满足如下要求:
1) 永磁材料的磁能积要大。磁能积就是永磁材料提供的吸附力与其质量的比值,磁能积越大,机器人的自身质量越小。
2) 清洁型爬壁机器人一般会选用超高压水射流清理方式,而清理后的壁面温度可高达60 ℃,所以磁性材料的工作温度要求不低于60 ℃。
3) 由于爬壁机器人在进行清理作业过程中磁铁会不断地与壁面产生碰撞接触,且工作壁面不平整,所以要求永磁材料具备很好的磁稳性。
综上所述,满足以上几点要求的磁性材料,才能满足爬壁机器人对吸附能力的需求。钕铁硼[13]是一种广泛应用于各种行业的永磁材料,它以金属间化合物Nd2Fe14B为基础,通过硼的加入形成四方晶体结构金属化合物,具有高饱和磁化强度、高的单轴各向异性和高的居里温度[14]。该材料具有出色的强磁性能和磁稳性[15],适合用于爬壁机器人的永磁吸附装置,都能满足爬壁机器人对吸附力的高性能要求,因此选择NdFeB30作为永磁吸附装置的磁性材料,NdFeB30性能参数如表1所示。

表1 NdFeB30性能参数
永磁吸附单元由永磁体、橡胶保护套、铝框和承载单元块组成,永磁吸附单元模型如图4所示,永磁吸附单元结构如图5所示。钕铁硼材料本身很脆且易腐蚀,所以表面需要进行镀镍处理[16]。为了提高整体结构的强度,铝框的材料选用铝合金,承载单元块材料选用钢1010。橡胶保护套是为了更好的保护钕铁硼材料,避免与壁面发生干摩擦而致使材料发生损坏。
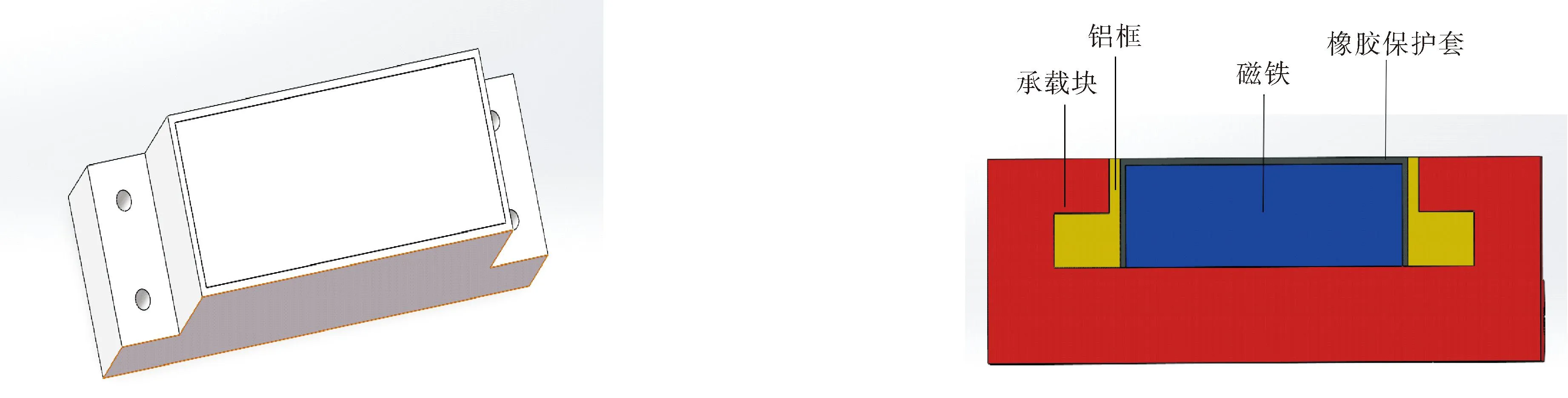
图4 永磁吸附单元模型
3.2 爬壁机器人永磁吸附结构仿真分析
通过Maxwell 软件模拟与爬壁机器人实际工作相似的环境,对爬壁机器人的永磁吸附单元进行磁力仿真,借助对磁吸附力和仿真结果的分析,对各构件尺寸参数进行优化设计。永磁吸附单元与船壁面间的磁吸附力受到永磁体截面形状尺寸变化及永磁体截面与船体壁面间隙关系的影响[17]。
本文采用控制变量的方法,将磁体放置在设计环境下,限定其他尺寸的大小,使需要模拟的尺寸作为单一变量,通过软件仿真,分析其对磁体磁吸附力的影响。永磁吸附单元与壁面吸附示意图如图6所示,设计单元永磁体的长、宽和高分别为l、w和h,船壁厚为x,永磁体与船壁间的距离为S,承载单元块的长、宽和高分别为L、W和H,其中承载单元块的尺寸是固定的,主要分析单元永磁体的尺寸对于其吸附力的影响[18]。
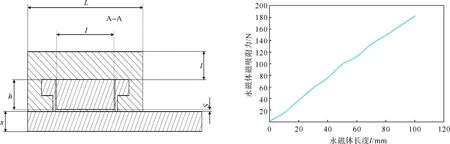
图6 永磁吸附单元与壁面吸附示意图
1) 假定h=15 mm,w=20 mm,S=3 mm,x=15 mm,利用Maxwell软件的模拟数据,分析单位永磁体长度l对其吸附力的影响,永磁体长度对磁吸附力影响曲线如图7所示。
2) 假定l=50 mm,h=15 mm,S=3 mm,x=15 mm,利用Maxwell软件的模数据,分析单位永磁体宽度w对其吸附力的影响,永磁体宽度对磁吸附力的影响曲线如图8所示。
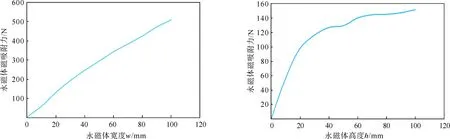
图8 永磁体宽度对磁吸附力的影响曲线
3) 假定l=50 mm,w=20 mm,S=3 mm,x=15 mm,利用Maxwell软件的模拟数据,分析单位永磁体的高度h对其吸附力的影响,永磁体高度对磁吸附力的影响曲线如图9所示。
由图7和图8可以看出,单元磁体的磁力随着其宽度和长度的增加而呈现出近似正比例增长;由图9可以看出,单元磁体磁力的变化在其高度h在20 mm以下时近似正比例变化,但超过20 mm后磁力变化又趋于平缓。结合数据变化及分析,选择单元永磁体的长度l=50 mm,宽度w=15 mm,高度h=20 mm,即单元永磁体的尺寸为50 mm×15 mm×20 mm,在此尺寸下可以提供的吸附力约为97 N。
3.3 永磁吸附单元的放置方案设计
基于文献[19],本研究采用不同于一般永磁式爬壁机器人永磁吸附单元放置方案的设计,即驱动轮内侧可各放置有一个吸附单元提供吸附力,底盘的永磁吸附单元放置设计是为搭载不同作业任务的自动化设备所准备,永磁吸附单元的放置方案如图10所示。永磁吸附单元由螺栓固定,可自由拆卸,十分方便,根据机器人搭载不同的自动化设备,进而调整永磁吸附单元数量,以达到吸附力自由调节的目的。
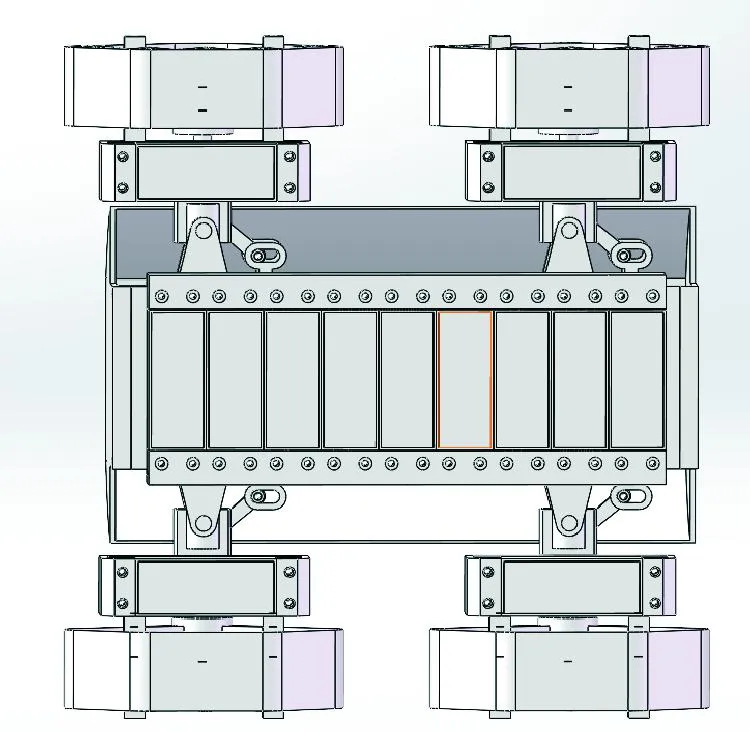
图10 永磁吸附单元的放置方案
非接触式磁力[20]吸附方式提高了机器人的运动灵活性,不仅能够提供足够的吸附力,而且可更好地适应不同的壁面,进行更多不同的作业任务。
4 结束语
本文针对中小型船舶壁面检测维护的需求,设计了一种新型的履带式永磁吸附爬壁机器人,提出了一种集成化的爬壁机器人装备技术,将不同的作业任务设备与机器人机体结合,实现遥控操作,提高了作业的安全性、效率和质量,符合船舶绿色发展的理念。根据船舶壁面的特点,提出了一种非常规的永磁吸附方式,将永磁吸附单元安装在机器人的底部,增加了接触面积和吸附力,适应不同厚度和材质的金属表面;建立了爬壁机器人工作时的静态力学模型,数值仿真分析验证了机器人的静态稳定性和吸附可靠性;设计了永磁吸附单元的磁路和封装结构,利用有限元分析软件Maxwell进行仿真优化,确定了影响吸附力最大的钕铁硼永磁体长度和宽度参数。下一步主要研究使爬壁机器人应用于船舶壁面维护作业,并结合动力学仿真软件对机器人直行和转向受力情况,对影响转向偏移量的多个因素进行综合分析优化,为控制系统找到最优位移补偿方案。