基于单片机的智能化磁罗经自差自测自校系统设计
2023-12-29季禹季本山方泉根
季禹, 季本山, 方泉根
(1. 江苏航运职业技术学院轮机工程学院, 江苏 南通 226010; 2. 上海海事大学商船学院, 上海 201306)
0 引 言
随着航海技术的迅速发展,船舶指向仪器从传统磁罗经发展成陀螺罗经、卫星罗经、电子罗经、光纤陀螺、激光陀螺。这些新型航海指向仪器的使用为船舶智能航行、无人船操控提供了数字化航向基准,为现代航海技术注入了新的活力,但它们无不依赖于船电和相关的接收信号,在非常情况下可能难以提供航向基准信号。磁罗经依靠地球的磁性来实现指向,不受船电、天候等因素的制约,结构简单,性能可靠,维护方便,因而至今仍被国际海事组织确定为法定安装设备。按《国际海上人命安全公约》和我国《海船航行设备规范》:凡150总吨及以上的船舶均应装设一具标准磁罗经或至少应配备一具合适的操舵罗经;各磁罗经应正确校正,并应备有随时可用的剩余自差表或自差曲线[1]。
由于船体钢结构具有硬铁和软铁的特性,其所产生的船磁会导致磁罗经指北发生偏差,该偏差被称为磁罗经自差。磁罗经自差的产生直接影响指向的准确度,有时甚至不能用于船舶指向,因此要及时校正磁罗经自差,把其误差控制在允许的范围内,确保磁罗经能提供准确的航向基准。
综合目前国内外磁罗经自差的校正方法,大致可归纳为两大类。第一类方法是自差补偿法[2-7]:这类方法实现的手段有多种,这里不一一列举,但其原理都是利用计算机技术自动计算出磁罗经在8个主航向上的自差并保存在计算机存储器中,然后把自差与罗航向之和作为磁航向用数字方式显示出来。自差补偿法只是自动计算出自差,并未对磁罗经柜中的磁棒和软铁校正器等进行调整,即并没有真正意义上地校正自差,而且计算出的自差保存在计算机存储器中,一旦断电,系统将无法显示磁航向。目前,这类方法仅停留在理论研究上,并无实际运用案例。第二类方法是人工校正法:这类方法是建立在磁罗经自差校正理论基础上的最传统、最经典的校正方法,其校正原理就是以性质相同、大小相等、方向相反的附加磁力来抵消船磁力的影响,即用附加的硬铁和软铁把船磁力抵消或降低到最小,使磁罗盘周围的磁场方向与地磁一致或接近,保证标准磁罗经、操舵罗经剩余自差分别在±3°、±5°范围内。现有的人工校正法有两种:一种是爱利法,即利用已知的航向或方位(通过陀螺罗经、测天体、测陆标等得到的)与待校正的磁罗经比对进行磁罗经自差校正的方法;另一种是测力法,这种方法是在科仑克法理论基础上形成的汤姆逊法、显示角法、科仑克法。目前,人工校正法仍是世界各国磁罗经校正师的首选方法,其中爱利法的使用更为广泛。
本文以爱利法理论为依据,在保证磁罗经优点的提前下提出磁罗经自差自测自校系统的设计方案,运用模糊控制原理实现智能化。通过实船安装检测,验证了系统的正确性和科学性,达到了设计目标,并获得了国家发明专利授权[8]。
1 磁罗经自差自测自校系统设计
1.1 系统理论
本文所设计的磁罗经自差自测自校系统在8个主航向上自动测量半圆和象限自差,利用单片机控制的步进电机传动系统来完成磁棒和软铁校正器的调整,从而实现半圆和象限自差的自动校正。
爱利法校正自差的步骤(对于首次校正的磁罗经要增加倾斜自差初校)如下。先校正半圆自差:在磁北(N)航向上测得自差δN,调整横向磁棒使δN→0;在磁南(S)航向上测得自差δS,调整横向磁棒使δS→δS/2;在磁东(E)航向上测得自差δE,调整纵向磁棒使δE→0;在磁西(W)航向上测得自差δW,调整纵向磁棒使δW→δW/2。即在E、N航向上将自差校正至零,在W、S航向上将自差校正一半留一半。然后,校正象限自差:在某一个隅点航向上测得自差,并移动软铁片(球)将自差校正到零;在相隔90°的另一个隅点航向上测得自差,移动软铁片(球)将自差校正一半(留一半)[9]。
1.2 系统组成
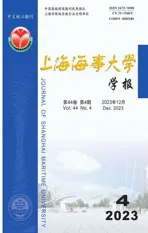
为实现校正器的自动调整,对磁罗经柜内原有磁棒校正器作如图1所示的改进:在横向、纵向调节齿轮外侧增加步进电机齿轮,这样步进电机转动时会带动调节齿轮和磁棒一起转动。对软铁校正器作如图2所示的改进:磁罗经柜两侧的软铁盒通过螺旋管与丝杆连接,两台步进电机带动丝杆转动使两个软铁盒同时远离或靠近磁罗经[8]。

1—横向磁棒; 2—纵向磁棒; 3—横向调节齿轮; 4—纵向调节齿轮; 5、6—步进电机齿轮
1、5—步进电机; 2、6—软铁盒; 3、7—螺旋管; 4、8—丝杆
系统电气组成框图见图3。采用的是SCT15系列单片机,该系列单片机具有内置晶振和两个串口,运算速度快,加密性能好;显示器采用通用的12864液晶显示器;语音提示模块用于在自校过程中发出语音提醒。

图3 系统电气组成框图
一般情况下,磁罗经每年都要校正一次。CPU从ATGM3320北斗系统中获得上次校正日期,在该日期后推11个月对应的日期,系统开始激活校正程序,利用船舶在8个主航向(或接近主航向)上航行的时机完成自差校正。如果船舶在某一主航向(或接近主航向)上保持航行2 min以上,系统会被唤醒;若该航向与主航向偏差在±10°范围内,系统会给出语音和屏幕提示,提醒驾驶员将航向调整至主航向上,为自校创造时机。校正程序启动后,以陀螺罗经或卫星罗经的航向为基准,从北斗系统的GPRMC语句中解析出磁差,与磁阻传感器获得的罗航向进行比较,由单片机计算出自差;根据模糊控制器的运算结果驱动步进电机,用磁棒和软铁片(球)抵消半圆自差和象限自差。系统在启动步进电机前会给出语音和屏幕提示,提醒在此航向上至少保持航行5 min。在一个航向校正完成后系统也会给出语音和屏幕提示。船舶停靠码头后专业校正人员可通过数据输出接口读取系统校正日期、剩余自差、校正地点等相关信息,以掌握系统及磁罗经的状态。
1.3 系统程序设计
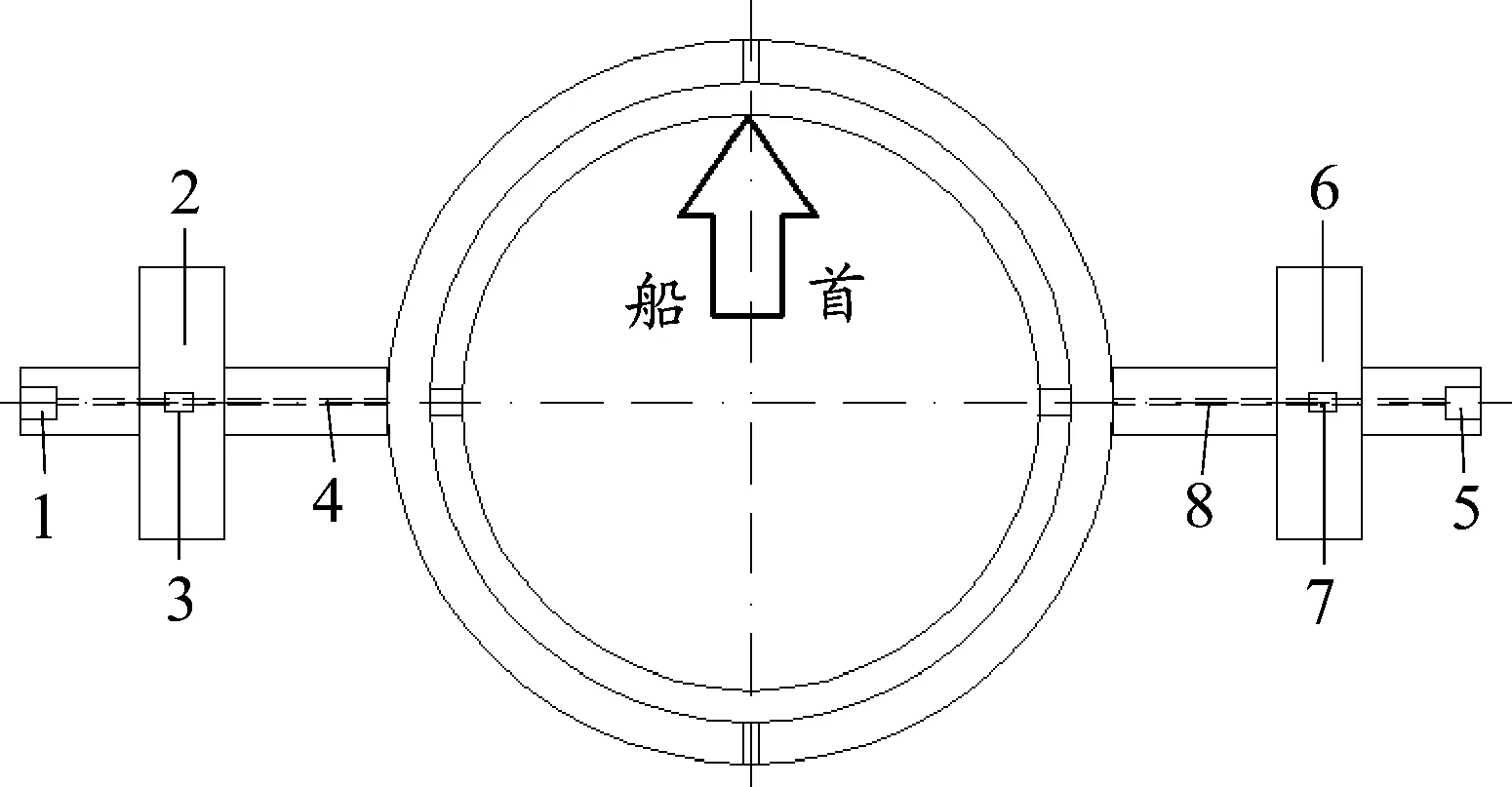
系统控制原理如图4所示,磁阻传感器检测到航向信号后一方面送复示器显示磁航向,另一方面与陀螺罗经(或卫星罗经)的航向进行比较,再从北斗系统获得磁差,从而得到磁罗经的自差。经单片机构成的模糊控制器运算后驱动步进电机转(移)动磁棒和软铁片,使剩余自差达到规定的要求。
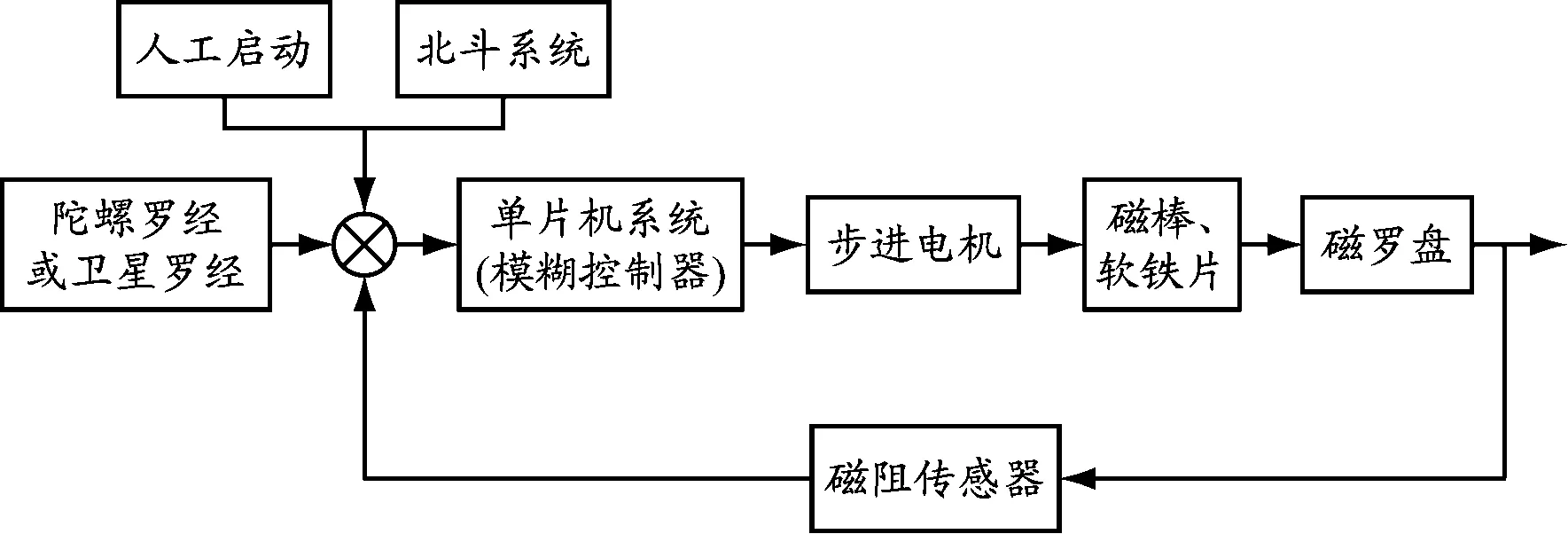
图4 系统控制原理
采用模糊控制器使系统具有良好的校正效果。根据人工校正自差的经验,建立模糊控制规则,以自差变化率De的取值集合{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}作为模糊集合的论域,模糊子集为[NL, NM, NS, Z0, PS, PM, PL],其中NL、NM、NS、Z0、PS、PM、PL分别表示负大、负中、负小、零、正小、正中、正大。以自差变化量Δδ和自差变化率De作为输入变量,设Δδ和De的隶属度函数的曲线形状为三角形(见图5),根据自差变化制定模糊控制规则库,对输出的步进电机转动量U[2]采用最大隶属度的模糊判决方法得到模糊控制查询表,见表1。这样步进电机的转动量U(包含NL、NM、NS、Z0、PS、PM、PL)就与校正器(校正磁棒或校正软铁片(球))的转动角度或移动距离形成对应关系,从而改变了校正力(校正磁棒的硬铁力或校正软铁片(球)的软铁力)。系统控制主程序(见图6)通过查表(查表算法子程序包含在模糊控制器算法中)的方式完成模糊控制算法,从而构建二维模糊控制器。
表1 步进电机转动量U的模糊控制查询表
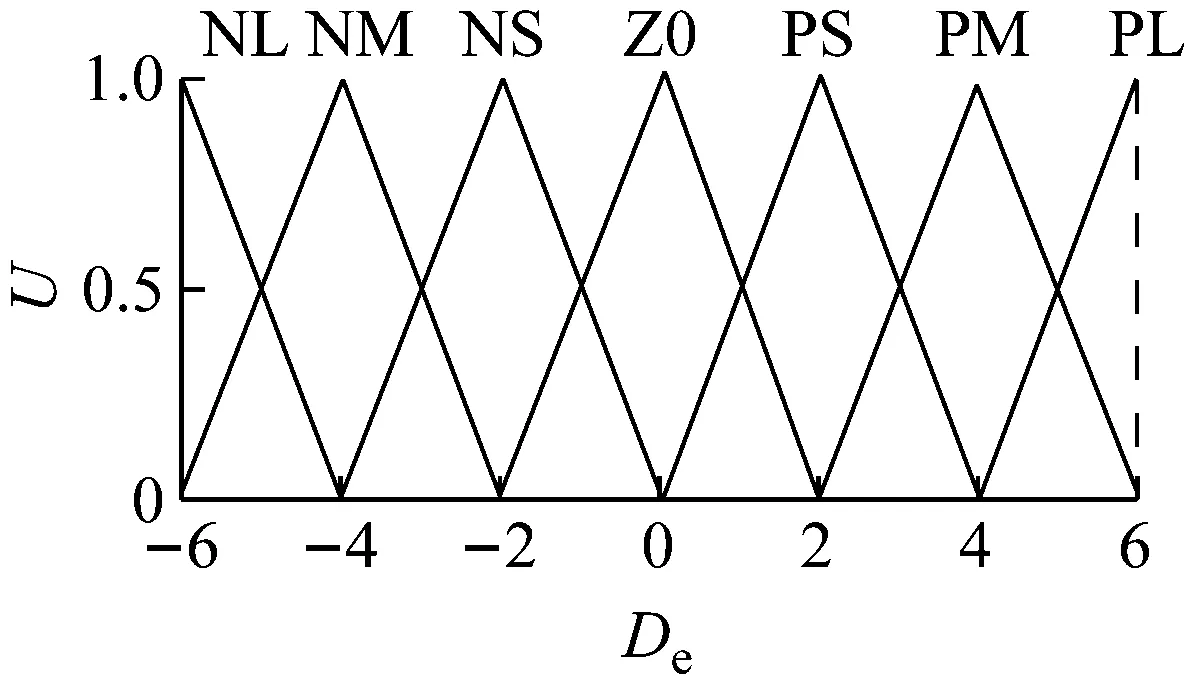
图5 隶属度函数图
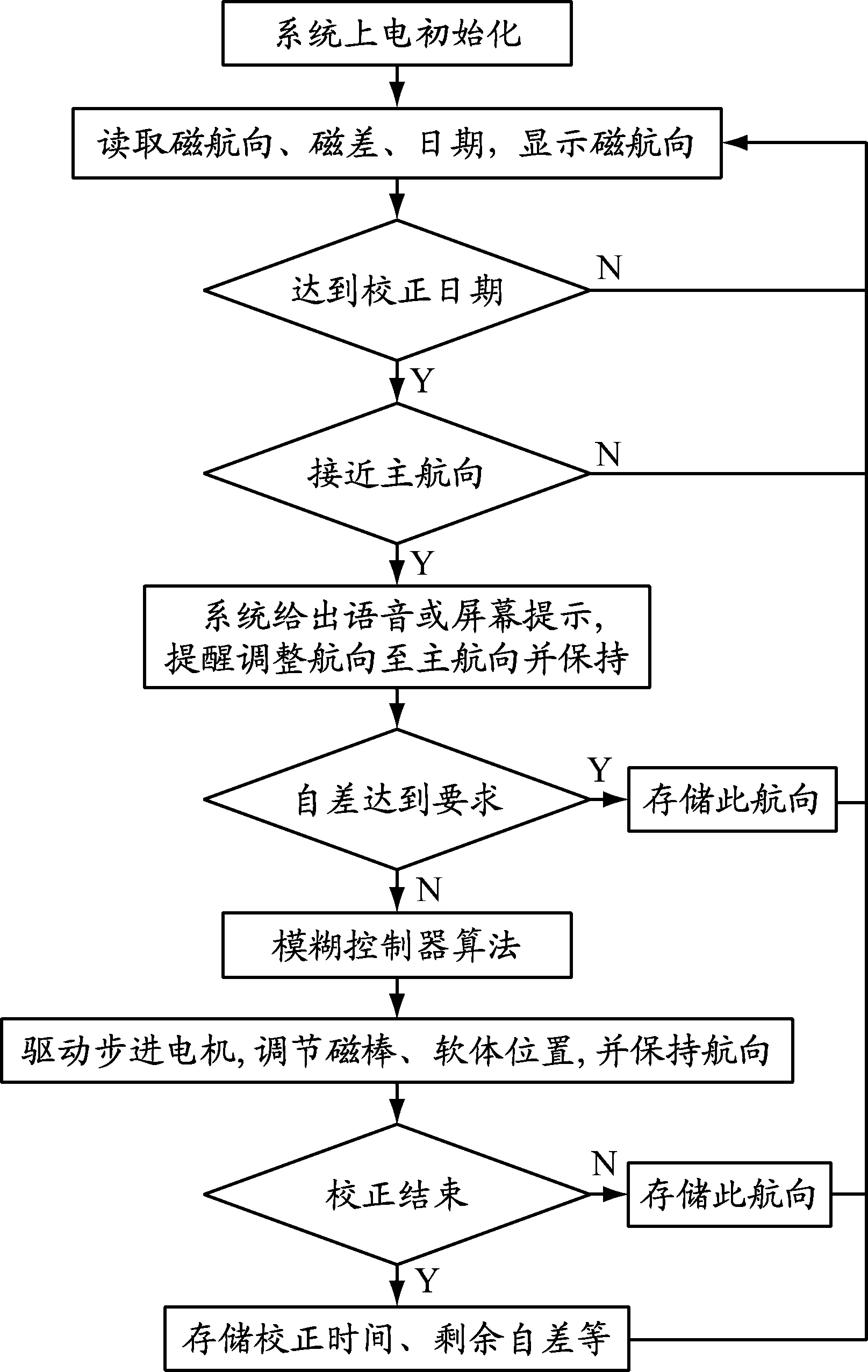
图6 系统控制主程序流程
1.4 系统初始化
按规定要求将磁罗经装船后,首先检查磁罗经的基线误差,再检查调节齿轮上磁棒的极性正确性,消除倾斜自差,固定垂直磁棒,然后就可进行系统初始化操作。系统的初始化过程实际上是用爱利法进行一次人工校正的过程,其目的主要是通过消除半圆自差和象限自差,预置横向磁棒、纵向磁棒和软铁片的初始状态。预置的纵、横向磁棒都尽量安放在支架上。为保证系统校正自差范围的最大化,在初始化时使图1中齿轮3上的一对磁棒处于平行状态。初始校正象限自差时,通过增减软铁盒中软铁片(球)的数量来保证软铁盒的初始位置位于螺杆的中间。
1.5 注意事项
为保证足够的校正量,即为保证系统有更大的调整范围,图1中齿轮3和4上的磁棒用矫顽力不小于18 000 A/m的磁性材料制成[10]。同一个齿轮对上两根磁棒的磁力大小相等,保证两根磁棒互相平行时对磁盘的作用合力为零。在系统非自动校正期间,为防止影响磁盘,步进电机一直处于断电状态。为把自校的结果、日期等信息保存下来,采用单片机IAP技术,在系统完成自校后调用应用编程小程序,在存储器中指定一个扇区用来存储数据,确保系统断电后单片机仍能保存这些信息。
2 磁罗经自差自测自校系统验证
将系统分别安装在5艘包括3种类型(货船、拖船、长江汽车轮渡)的船上进行验证。以长江某锚地为检测水域,在系统自校前测量出磁罗经在8个主航向上的自差值,在自校后测得剩余自差。以通港拖X号165标准磁罗经为例进行说明,初始化后,调乱校正器的位置,使自差大于3°或以上。采用人工启动方式激活系统或通过调整日期达到激活条件后自动激活系统,若船在8个接近主航向的航向上航行超过2 min,则系统均会给出语音和屏幕提示,提醒将航向调整至主航向上航行。在每个主航向上航行5 min内系统完成自校过程。校正结束后,人工测量剩余自差,结果见表2。用串口助手通用软件读取系统校正后所存的数据,见图7。基于自差总公式δ=A+BsinCc+CcosCc+Dsin(2Cc)+Ecos(2Cc)(其中Cc为罗航向)可得自差系数A=0,B=0.6°,C=0.5°,D=0.08°,E=0.05°。自差系数和8个主航向上的剩余自差均小于1°,各航向上的比差小于0.5°,根据这些指标综合评判校正质量为优秀。校正自差所用时间取决于操舵、把舵的时间,在实际使用中因为利用的是船舶航行时的航向,所以校正时间是充裕的。在验证中实际所用时间小于或等于人工校正用时。其余4艘船的磁罗经自差校正质量均达到优良等级,故所有磁罗经剩余自差均符合规范要求。因此,系统设计正确,工作可靠,校正效果达到了预期目的。
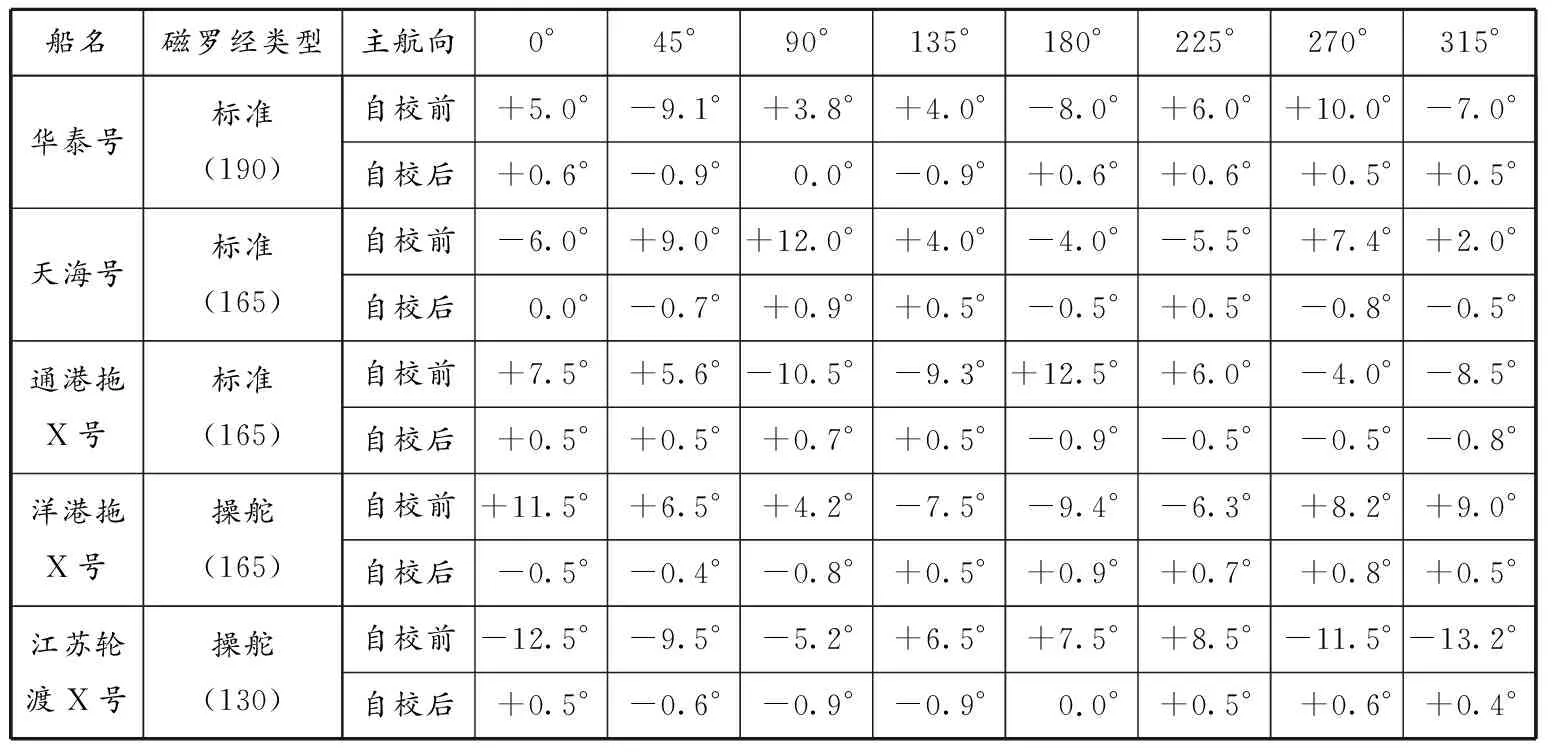
表2 磁罗经自差自测自校系统在5艘不同类型船上的验证
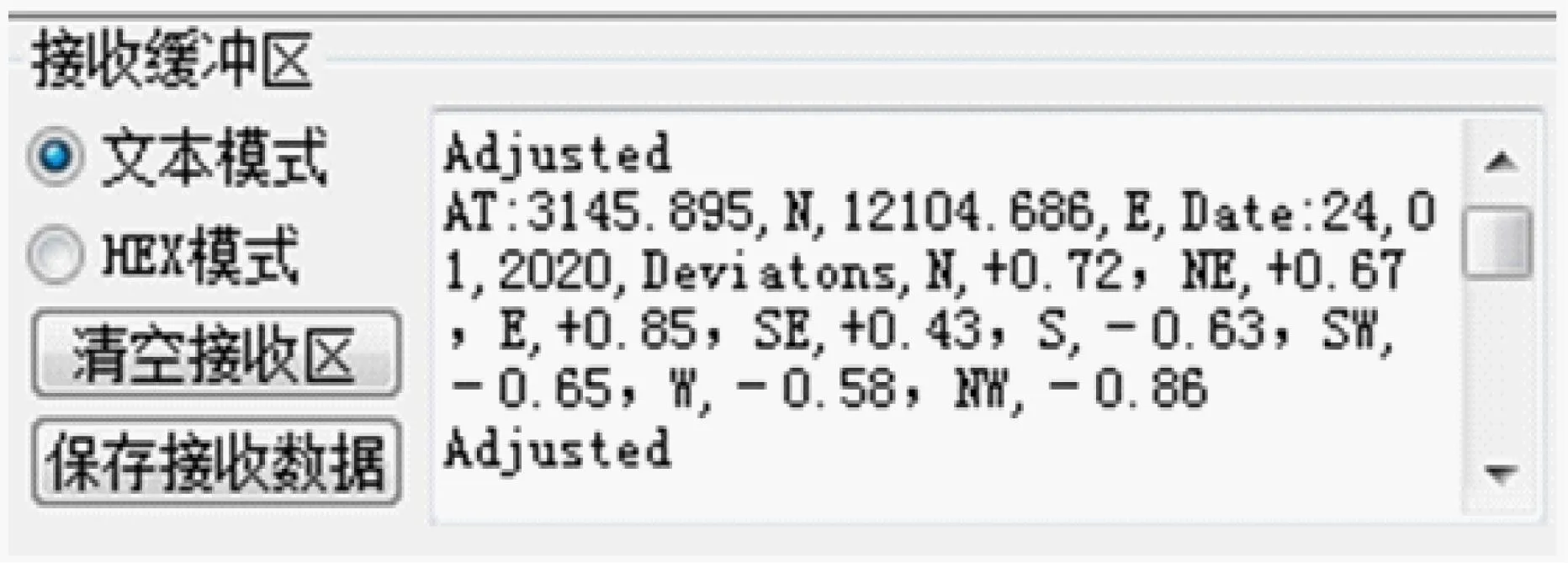
图7 串口助手读取的数据图
3 结束语
磁罗经自差自测自校系统仅在自测自校期间使用陀螺罗经或卫星罗经的航向作为参考基准,自动完成需人工进行校正的工作程序。在自差校正结束后,系统的电机传动部分处于断电状态,磁罗经为船舶提供磁航向和磁方位。磁罗经自差自测自校系统的优点在于:利用船舶在8个主航向上航行的时机自动完成自差校正,替代了传统的由专人定时在宽阔水域进行自差校正的方法,省工省时省油;由于通过改变磁棒和软铁片(球)位置来消除自差,所以自差校正结束后磁罗经仍保持着不依赖船电的传统优势,是值得推广的一种校正方法。