并网型交直交电源对船舶电力系统暂态稳定性影响的仿真分析
2023-12-29孙玉伟刘勇吴健袁成清汤旭晶
孙玉伟, 刘勇, 吴健, 袁成清, 汤旭晶*
(1. 武汉理工大学船海与能源动力工程学院, 湖北 武汉 430063;2. 武汉理工大学国家水运安全工程技术研究中心, 湖北 武汉 430063;3. 武汉理工大学交通部船舶动力工程技术交通行业重点实验室, 湖北 武汉 430063;4. 武汉理工大学交通与物流工程学院, 湖北 武汉 430063)
0 引 言
为解决当今船舶所面临的日益严峻的能源与环境问题,全球船舶行业都在致力于研究新能源发电以及如何提高能源利用效率[1-2]。边晓燕等[3]以安全稳定运行为约束条件,通过建立远海风电场模型研究风电在船舶上的应用;QIU等[4]选取“中远腾飞”汽车船研究了光伏系统安装在船舶电力系统中的可行性;LARSEN等[5]调查了一种独特的卡琳娜循环技术,用于大型船用发动机的废热回收。风能发电、余热发电等新能源发电方式通过采用高速永磁同步发电机提高能源利用效率,但输出的高频交流电需要通过整流逆变装置后并入船舶电网。根据电能变换侧需要经过整流逆变过程的特点,将此类发电装置称为并网型交直交电源。当前针对并网型交直交电源在船舶上应用的研究多集中在关键设备研制以及整流逆变设备控制研究上,较少关注实际工程应用中的系统暂态稳定性问题,缺乏相关的理论指导。
并网型交直交电源虽然能够提高船舶电力系统的电力电子化程度,但会加剧电网故障时的不稳定性。并网型交直交电源对船舶电力系统的影响主要体现在以下3个方面:(1)并网型交直交电源改变了船舶电力系统的拓扑结构,使得系统能量传输路径发生变化,同时电力电子设备的投入使得具有多时间尺度控制的船舶电力系统变得更为复杂,加大了解耦分析的难度[6]。文献[7]从机电暂态过程角度将电力系统划分为电磁暂态、机电暂态和中长期动态等3组变量,认为电力系统至少是3个时间尺度的动态系统。(2)并网变流器的控制策略直接决定并网型电源的工作特性,可以通过设置不同的控制策略满足船舶电网的复杂需求。常规控制策略包含恒功率控制策略、恒压恒频控制策略、下垂控制策略、虚拟同步发电机(virtual synchronous generator,VSG)控制策略以及根据控制目标制定的针对性控制策略[8-10]。(3)并网型交直交电源通过变流器中的开关器件动作实现变流供电,没有同步旋转电源的转轴和阻尼绕组,输出的电磁功率不受功角方程制约,不能瞬时分担系统状态变化时的扰动功率,使系统抗扰动的能力下降[11-12]。
为研究并网型交直交电源对船舶电力系统暂态稳定性的影响,本文在电力系统计算机辅助设计(power system computer aided design, PSCAD)软件中搭建集成并网型交直交电源的船舶交直流混联电力系统暂态仿真模型。通过功率外环和电流内环的双闭环形式实现VSG控制策略下的恒功率控制,分析并网型交直交电源在不同扰动下对船舶电力系统暂态稳定性影响的规律,研究三相短路故障时并网型交直交电源虚拟惯量对系统频率的影响,从惯量支撑功率的角度解释虚拟惯量对功率波动的支撑作用。
1 并网型交直交电源控制策略及系统仿真模型
1.1 并网型交直交电源的控制策略
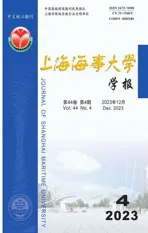
恒功率控制策略可将并网型交直交电源输出的有功功率和无功功率解耦后分别通过有功电流和无功电流进行控制,使输出功率等于参考功率。恒功率控制策略常用功率、电流双环的方式实现,见图1[13]。图1中:uabc、iabc分别为变流器输出的三相瞬时电压和电流;ud、uq、id、iq分别为派克变换后的电压分量和电流分量;Pgrid、Qgrid为功率实际值;Pref、Qref为给定的功率参考值;idref、iqref为电流控制指令;Ped、Peq为输出调制信号;θ为变流器输出电压相位;L为滤波电感值。
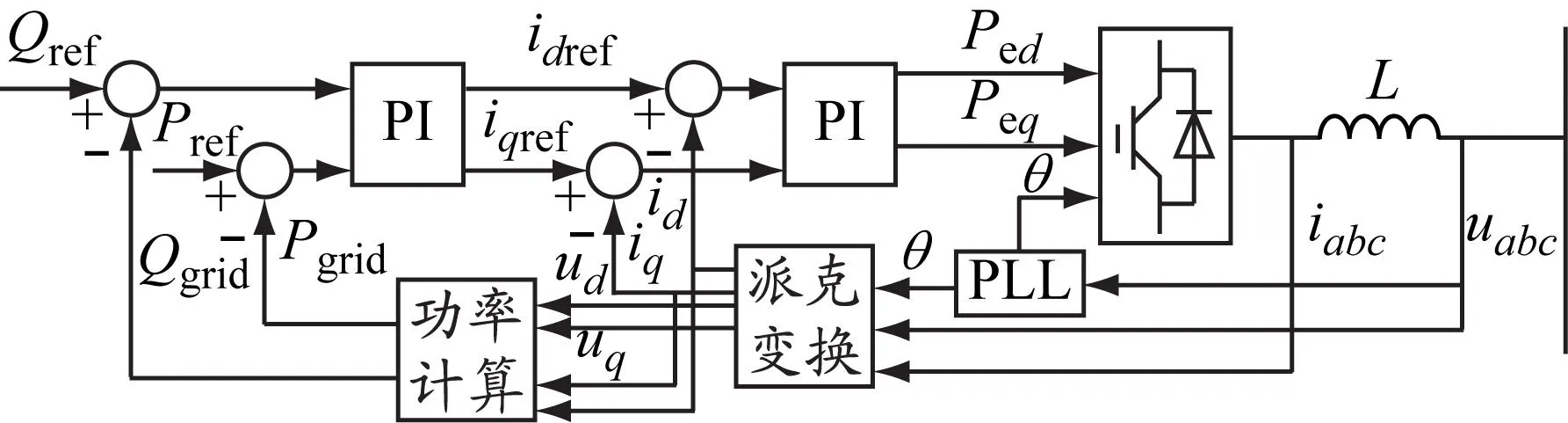
图1 恒功率控制策略原理
功率电流双闭环的VSG控制就是在双环控制基础上增加功率的前级控制[14]。VSG控制策略通过模拟同步发电机的机械和励磁特性对变流器进行控制,从而实现电压和频率调节[15]。VSG引入同步发电机转子运动方程模拟同步发电机的机械特性:

(1)
式中:PT和PE分别为VSG输入机械功率和输出有功功率的实际值;J和D分别为虚拟惯量和阻尼系数;ω0和ω分别为额定角频率和实际角频率;δ为功角。
图2为结合原动机调节方程与转子运动方程形成的有功-频率控制器,其中Kω为有功-频率下垂系数。该控制器的传递函数为

图2 有功-频率控制器
(2)
对式(2)进行变换处理,可得到角频率与功率之间存在的关系:
(3)
式中:

(4)
由式(4)可知,阻尼系数、转动惯量和调差系数均会影响τ和ξ的值,进而对并网型交直交电源的控制效果产生影响。
无功-电压控制器模拟同步发电机的励磁特性使VSG能够进行电压调节[17]。无功-电压控制器见图3,其中:U0为VSG的励磁电压;Uref为通过无功-电压下垂环节得到的并网型交直交电源的输出电压幅值参考值。Uref计算式为

图3 无功-电压控制器
Uref=Un+(Qref-Qgrid)Ku
(5)
式中:Un为额定电压有效值;Ku为无功-电压下垂系数。
1.2 船舶电力系统仿真模型
图4为某型船舶交直流混联电力系统。该系统额定频率为60 Hz,主配电板额定电压为0.44 kV,分配电板额定电压为0.22 kV,直流配电板额定电压为0.75 kV。两台同步发电机组并联运行,等比例分配有功功率和无功功率。电压源变流器(voltage source converter,VSC)采用定直流电压和定无功功率控制,其输出功率由直流部分的负荷需求决定。超级电容采用定功率控制,直流电压由VSC支撑。并网型交直交电源中的高速永磁发电机首先通过不控整流器将高频交流电变为直流,再经过并网逆变器将直流电变为60 Hz工频交流电,最后于交流主配电板馈入船舶电力系统。
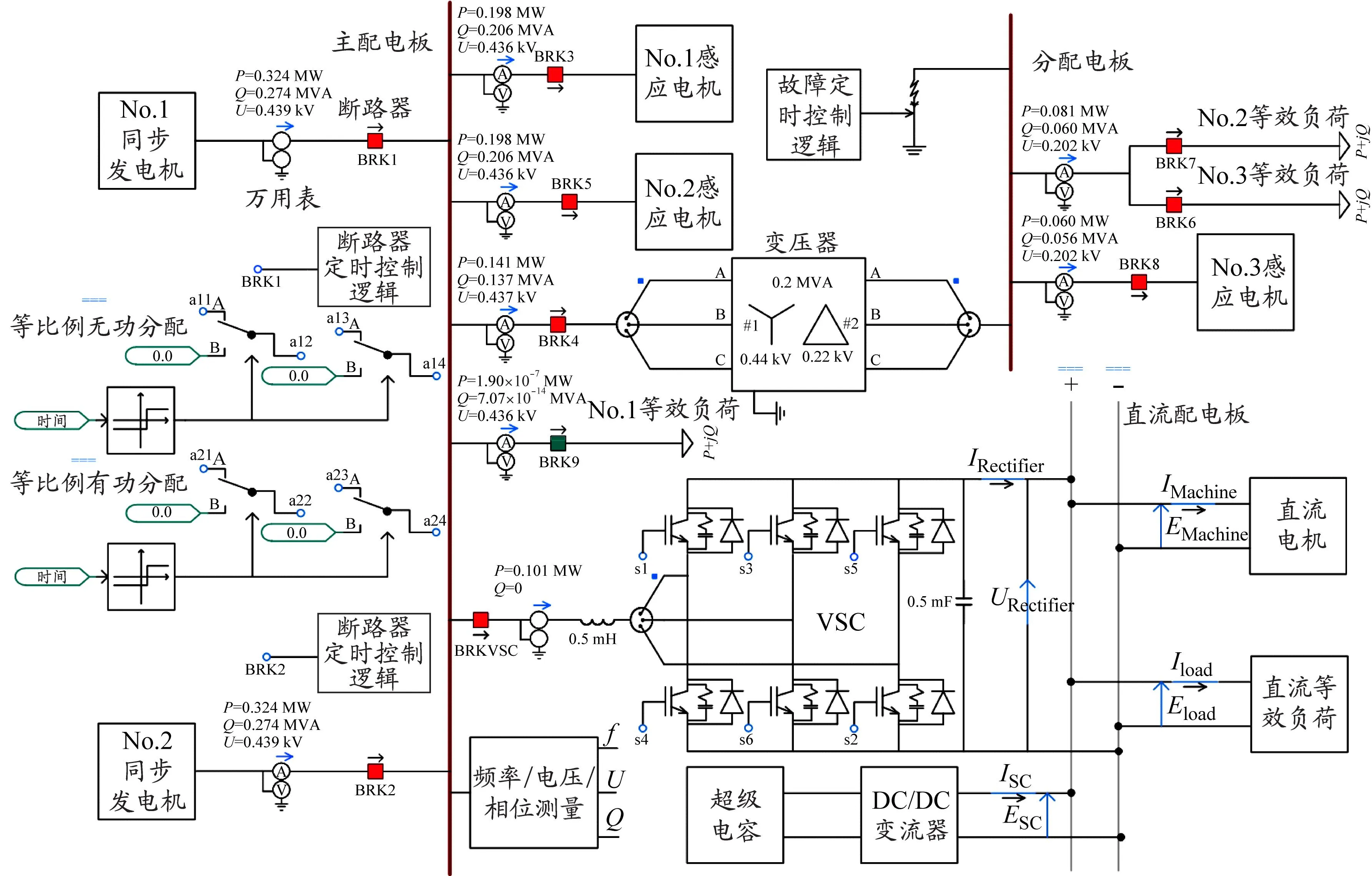
图4 某型船舶交直流混联电力系统
同步发电机、感应电机、直流电机、等效负荷等设备的主要参数见表1~3。变压器的容量为200 kVA,原副边变比为0.45/0.22。超级电容的电容量为30 F,等效内阻为0.01 Ω。不控整流器的输出端电压为1.01 kV,并网型交直交电源的输出功率为108.6 kW,并网节点选为主配电板。扰动案例1和2中,VSG控制策略的虚拟惯量为2 kg·m2,阻尼系数为2 N·m·s/rad。
表1 同步发电机参数
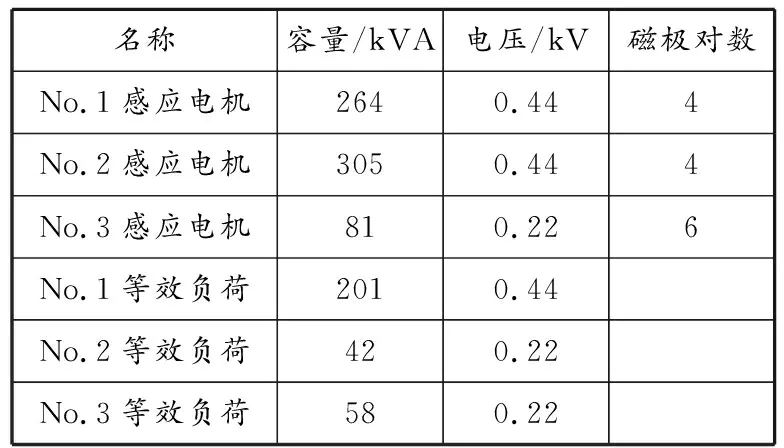
表2 交流负载参数

表3 直流负载参数
2 故障扰动时的系统暂态稳定性分析
2.1 三相短路故障影响
设置扰动案例1: 5 s时交流分配电板发生三相短路故障,5.2 s时故障清除。同步发电机的有功功率、同步发电机的功角、主配电板电压、系统频率、VSC输出功率和直流配电板电压在系统发生三相短路故障时的变化情况见图5。
(a)同步发电机有功功率
由图5可知,当系统发生三相短路故障时同步发电机输出功率和同步发电机功角、交流配电板电压、频率等特征参数会在短时间内发生大幅度波动,采用VSG控制策略的并网型交直交电源能够参与改善系统参数的波动情形。图5(a)中,VSG控制策略相对于恒功率控制策略能够更快地实现功率稳定,减小短路电流激增所带来的影响。图5(b)中,由于VSG模拟了调速系统的调频环节并且引入了同步发电机的转子运动方程,所以同步发电机输出的功率同样受功角方程制约。在输出功率相同的情况下,采用VSG控制策略和恒功率控制策略时功角在经过调节后均稳定在0.162 5 rad,仍可看到采用VSG控制策略时功角偏差幅值较小。图5(c)和5(d)中,VSG控制策略能够有效参与电压调节和频率调节过程,无功电压控制器中阻尼系数额外提供的阻尼效果延长了电压到达峰值0.44 kV的时间,同时有功频率控制器提供的虚拟惯量能够在系统频率跌落时提供短时支撑作用,有效抑制频率的波动。图5(e)和5(f)表明分配电板短路故障对主配电板产生的干扰间接影响了直流输出功率和电压,而并网型交直交电源对直流部分的影响较小。
2.2 突变负荷扰动影响
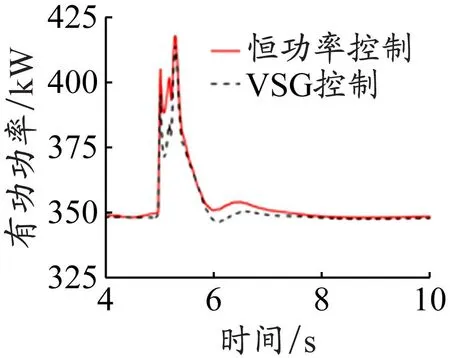
设置扰动案例2: 5 s时主配电板负荷突然跌落20%,7 s时恢复至初始负荷。同步发电机的有功功率、同步发电机的功角、主配电板电压、系统频率、VSC输出功率和直流配电板电压受突变负荷扰动时的变化情况见图6。
由图6可知,系统受到突变负荷扰动时同步发电机输出功率和功角会出现瞬时跌落,交流配电板电压、频率等特征参数发生波动,采用VSG控制策略的并网型交直交电源能够缩短系统恢复稳定的时间。图6(a)中,当系统受到突变负荷扰动时,采用VSG控制策略时在6.1 s左右功率就可恢复稳定值,采用恒功率控制策略时功率在负荷突变的5~7 s内一直处于不稳定状态,可见VSG控制策略对同步发电机有功调节的增益效果。图6(b)中,采用VSG控制策略时功角特性在初始阶段即可保持相对高的稳定能力,但当受到突变负荷扰动时功角跌落程度比采用恒功率控制策略时的大。在负荷恢复后,若采用VSG控制策略则功角恢复过程更为平缓,与功角初始值的差值也更小。从图6(c)可以看出,VSG控制策略的电压调节过程更为理想,电压变化幅度为0.02 kV,当负荷突然减小时电压变化幅值比恒功率控制策略的低了0.01 kV,当负荷突然增大时电压变化幅值比恒功率控制策略的低了0.004 kV。图6(d)中,相比于采用恒功率控制策略,采用VSG控制策略时频率在暂态过程中的变化更小。尤其是在扰动发生的瞬间,VSG控制环节中的虚拟惯量能够提供一部分电磁功率,防止频率跌落过快。图6(e)和6(f)中,由于VSG控制策略改善了系统交流部分的主要参数,间接对VSC输出功率和直流电压起到微弱的调节作用。
综合三相短路故障和负荷突变扰动工况的暂态分析结果可知,采用VSG控制策略时并网型交直交电源的功角、电压和频率等特征参数的变化规律与同步发电机的类似,能够参与功率调节过程,改善系统参数变化。
3 虚拟惯量对船舶电力系统频率特性的影响
船舶电力系统的惯性主要源于同步发电机和电动机等设备的转动惯量,表现为阻止频率变化的能力。在船舶交直流混联电力系统中,并网型交直交电源和直流部分均会导致系统的惯性减小、抗扰动能力降低。采用VSG控制策略的并网型交直交电源既能向系统提供惯量,又具备电力电子设备的快速响应特性,可以减小由系统发生功率缺额所导致的频率偏差,从而改善船舶电力系统的频率稳定性。通过调节VSG控制中的虚拟惯量J,分析并网型交直交电源对船舶电力系统频率稳定性的影响。以扰动案例1为基础,保持阻尼系数不变,电力系统的频率在虚拟惯量分别为1、2、3 kg·m2时的变化情况见图7。
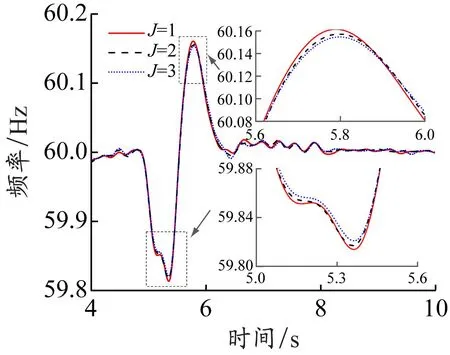
图7 频率在虚拟惯量分别为1、2、3 kg·m2时的变化
由图7可知,系统频率受VSG控制策略的影响,在虚拟惯量不同时频率的响应情况也不同。在故障发生的瞬间,系统频率在不平衡功率的作用下开始跌落,VSG通过虚拟惯量为系统提供短时的惯量支撑功率。因此在故障持续的5.0~5.2 s内,虚拟惯量越大,系统频率跌落的程度越小,频率变化的趋势也更为平缓。在故障清除后,同步发电机组的调速系统动作,VSG的虚拟惯量持续发挥作用,但惯量支撑功率随着同步发电机贡献的增加逐渐减少。系统频率在故障清除后的0.2 s内达到频率振荡的最小值。对应于虚拟惯量为1、2、3 kg·m2,频率最小值分别为59.812、59.816和59.820 Hz。系统频率在故障清除后的0.6 s内达到频率振荡的最大值。对应于虚拟惯量为1、2、3 kg·m2,频率最大值分别为60.160、60.155和60.153 Hz。由于并网型交直交电源的渗透率不高,所能提供的虚拟惯量与同步旋转设备的转动惯量相比较小,故对系统频率的影响程度较低。尽管如此,仍可以预见到随着并网型交直交电源渗透率的提高,虚拟惯量值也会增大,VSG控制对频率稳定性的影响会更加突出。在6.9 s左右时,同步发电机组和VSG的调速环节和阻尼环节共同促使系统频率恢复稳定,虚拟惯量提供的惯量支撑功率为0,3种工况下的频率调节曲线基本相同。
从上述分析可知,采用VSG控制策略的并网型交直交电源能在一定程度上提高船舶交直流混联电力系统的惯性,并且能够参与到频率调节过程中,提高系统的频率稳定性。VSG控制策略模拟了同步发电机的转子运动方程,同样具有虚拟机械功率和虚拟电磁功率,因此并网型交直交电源的惯量支撑功率计算方法与同步发电机的相同。扰动案例1中采用VSG控制策略时的虚拟机械功率和虚拟电磁功率见图8,惯量支撑功率见图9。
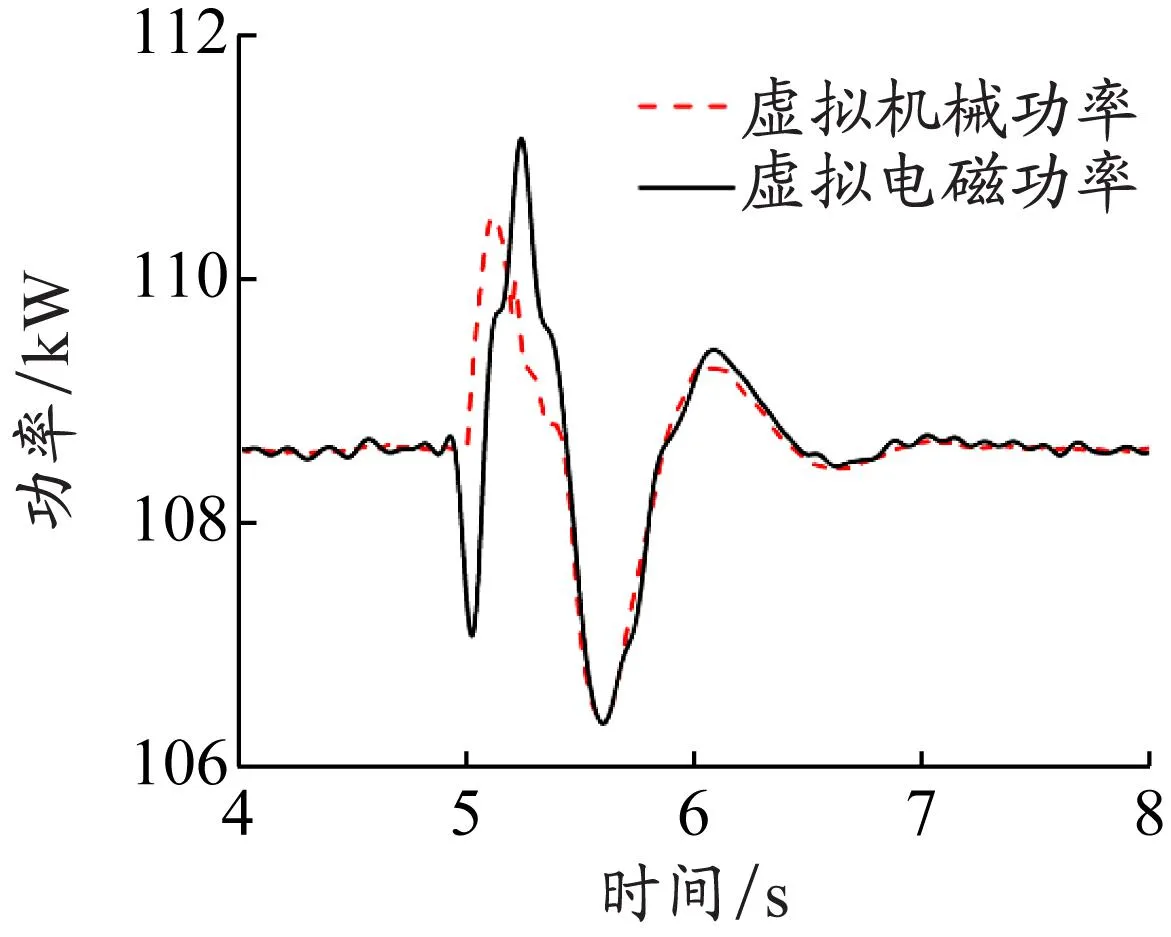
图8 VSG的暂态功率响应特性

图9 VSG的惯量支撑功率
从图8可以看出,采用VSG控制策略时并网型交直交电源在系统发生三相短路故障时同样会出现瞬时功率跌落,虚拟机械功率受惯性影响不能及时响应,存在0.01 s的延时,此时虚拟电磁功率已经由108.6 kW跌落至106.0 kW。在5.020 s时VSG检测到系统频率跌落,同时迅速增发电磁功率,在5.184 s时达到电磁功率最大值110.6 kW。此时同步发电机调速系统开始动作,频率在同步发电机调速系统的作用下开始做阻尼运动。在频率做衰减振荡时,VSG输出的虚拟电磁功率减小,同时机械功率与电磁功率的变化幅度趋于一致。从图9可知,在并网容量为108.6 kW,虚拟惯量为2 kg·m2,阻尼系数为2 N·m·s/rad的情况下,VSG在系统发生暂态事件时能够增发的最大惯量支撑功率为2.287 kW,能够吸收的最大惯量支撑功率为1.751 kW。VSG的惯量支撑功率在6.1 s时彻底消失,而系统频率在6.1 s时仍未恢复稳定。因此,虚拟惯量对系统功率波动的支撑作用只能持续1.08 s,且作用效果不断衰减。在6.1 s后系统频率主要由同步发电机进行调节,VSG控制仅通过有功频率控制器和阻尼作用影响系统频率,但在调节能力上与同步发电机相差很大。
4 结 论
本文聚焦于并网型交直交电源对船舶电力系统暂态稳定性的不确定性影响问题,分析短路故障和突变负荷扰动情况下并网型交直交电源对船舶电力系统的影响,深入探讨采用VSG控制策略时并网型交直交电源的虚拟惯量对船舶电力系统频率的支撑问题。通过研究得到如下结论:
(1)发生三相短路故障时系统特征参数的波动比受到突变负荷扰动时的剧烈,其中采用VSG控制策略时主配电板电压的变化在两种情况下的区别最明显,受到突变负荷扰动时电压波动为0.02 kV,仅相当于发生三相短路故障时电压波动0.11 kV的18.2%。
(2)发生短路故障时采用VSG控制策略的并网型交直交电源能够抑制特征参数的波动,5.2 s时的系统的频率跌落幅度比采用恒功率策略时的低0.15 Hz;受到突变负荷扰动时采用VSG控制策略的并网型交直交电源能够缩短特征参数恢复稳定的时间,特别是在采用VSG控制策略时同步发电机有功功率在6.1 s时恢复稳定,采用恒功率策略时同步发电机功率在5~7 s始终处于不稳定状态。
(3)当VSG控制策略的阻尼系数为2 N·m·s/rad时,虚拟惯量为1、2、3 kg·m2分别对应的频率变化范围为59.812~60.160 Hz、59.816~60.155 Hz、59.820~60.153 Hz,系统频率偏差随虚拟惯量增大而减小。
(4)当VSG控制策略的阻尼系数为2 N·m·s/rad、虚拟惯量为2 kg·m2时,并网型交直交电源在系统发生暂态过程中能够提供-1.750~2.297 kW的惯量支撑功率,在系统频率变化时能够起到有效的支撑作用,但只能持续1.08 s,维持时间较短,后续的频率调节过程主要由同步发电机完成。