基于故障诊断的分布式电动汽车容错控制策略
2023-12-28李龙骧王保华
李龙骧,王保华,2
(1.湖北汽车工业学院 汽车工程学院,湖北 十堰 442002;2.湖北隆中实验室,湖北 襄阳 441000)
分布式电动汽车由于过驱动系统结构,电机数量增多的同时也增加了电机失效的概率。汽车行驶过程中电机失效会无法满足期望的输出力矩,从而影响动力性和稳定性。研究分布式电动汽车电机失效的容错控制对提升汽车驱动能力和安全性具有重大意义。褚文博等[1]设计了基于规则的电机失效时协调汽车稳定性和动力性的控制方法,低速时保证车辆的动力性,高速时提高车辆的横摆稳定性,但部分情况下会引入一些非期望的横摆力矩。刘新磊等[2]针对分布式电驱动汽车双电机失效模式,提出对应的力矩分配策略,保证了稳定性和动力性,但将失效电机转矩置零,未考虑电机部分失效时对电机力矩余量的利用。张雷等[3]设计了基于多方法切换的容错控制策略,针对不同的失效模式和工况,切换不同的控制方法,保证了电机失效时汽车的安全性,但控制切换阈值需要汽车实时的状态值,对传感器精度要求高。Zhang 等[5]将电机状态考虑到力矩分配策略中,提高了车辆的动力性和稳定性,但需要及时的故障诊断,为被动容错控制,无法对故障电机进行最大程度的补救。文中提出了基于故障诊断的滑模变结构控制的容错控制策略。容错控制器采用分层控制结构,上层控制器使用滑模控制求得当前车辆所需的附加横摆力矩,通过PI控制求出车辆期望的纵向力需求;下层控制器通过故障诊断模块得到表征故障状态的失效因子,设计故障容错模块,利用二次规划重新优化分配驱动力矩,确保故障模式能够保证车辆的动力性和行驶稳定性。
1 电机失效的车辆建模
忽略车辆的垂向、侧倾和俯仰运动以及空气阻力和悬架等对车辆的影响,建立三自由度动力学模型,包括纵向运动、侧向运动和横摆运动,模型见图1。纵向运动平衡方程为

图1 车辆模型
侧向运动平衡方程为
横摆运动平衡方程为
式中:Vx为纵向速度;Vy为侧向速度;m为整车质量;γ为横摆角速度;Fxi为第i个轮胎的纵向力;Fyi为第i个轮胎的侧向力;δ为前轮转角;Iz为车辆绕z轴的转动惯量;a为质心到前轴的距离;b为质心到后轴的距离;d为轮距;i取1、2、3、4,分别表示左前轮、右前轮、左后轮和右后轮。
2 整车控制器设计
分布式电动车电机失效容错控制结构见图2,将期望车速和期望前轮转角输入到线性二自由度参考模型,得到期望横摆角速度和质心侧偏角,输入容错控制器中。容错控制器分为2层,上层控制器将横摆角速度和质心侧偏角的偏差通过滑模控制算法计算附加横摆力矩Mzd,期望车速与实际车速的偏差通过PI 控制算法计算出期望纵向力Fxd;下层为转矩分配层,将上层输出的期望横摆力矩和纵向力进行二次规划,以轮胎利用率为优化目标,结合电机故障诊断出的失效因子,算出最优力矩并分配给轮毂电机,保证车辆的稳定性和动力性。

图2 容错控制结构
2.1 纵向运动控制器
纵向力需求计算采用PI 控制器,根据期望车速Vxd和实际车速Vx的偏差计算Fxd,力矩分配时,需要保证4个车轮纵向力总和为Fxd。对Fxd进行估算:
式中:Kp为比例系数;Ki为积分系数。
2.2 横向运动控制器
由线性二自由度车辆模型推出横摆角速度和质心侧偏角为
式中:kf为前轮侧偏刚度;kr为后轮侧偏刚度。定义滑模面s为
式中:ε为加权系数。选择等速趋近律:
由于符号函数不连续,为了避免控制时系统抖振,采用饱和函数代替符号函数:
式中:τ为边界层厚度。联立式(5)~(7)可得目标横摆力矩:
2.3 基于故障诊断的力矩分配策略
2.3.1 电机故障诊断模块
驱动电机失效时,电机无法达到期望力矩输出,将失效形式分为无失效、完全失效和部分失效。引入故障因子来表示电机的失效程度,确定故障车轮和故障时输出转矩。
式中:Ti为各电机的实际输出转矩;Tui为各电机的期望输出转矩;ki为电机故障因子,等于0表示电机完全失效,等于1表示电机没有失效,小于1确定某电机失效;n为电机转速;p为电机输出功率。
电机诊断模块将各个电机故障因子传递给下层的力矩分配控制器,电机失效时,给失效电机力矩输出限值,充分利用各个电机余量力矩,保证车辆的稳定性和动力性。
2.3.2 考虑故障约束的力矩分配策略
利用二次规划设计,基于优化轮胎负荷率算法,满足上层容错控制器算出的期望纵向力和横摆力矩,并且满足电机物理约束,使得到4 个电机的驱动力矩满足车辆的动力性和横摆稳定性。
式中:H、f为系数矩阵;A、Aeq、b为约束条件;UB、LB为电机力矩的上下限。
基于车辆稳定性的要求,将轮胎负荷率平方和作为目标函数:
式中:μ为地面附着系数。轮胎利用率越低,剩余可用的力越大,车辆附着能力提高,趋于稳定。横摆稳定性主要受纵向力影响,侧向力相较于纵向力较小,因此忽略侧向力影响,目标函数简化为
式中:R为车轮半径。
容错控制器在电机力矩分配时,需要满足上层的期望纵向力和横摆力矩,并且满足电机输出的物理约束和目标函数,约束为
式中:Timax为电机最大力矩;Timin为电机最小力矩;Fzi为第i个轮胎的垂向力。
3 联合仿真分析
采用TruckSim 建立分布式电驱动汽车动力学模型并进行联合仿真,在正弦输入和双移线输入工况下分别验证容错控制策略的可行性和可靠性。车辆基本参数见表1。
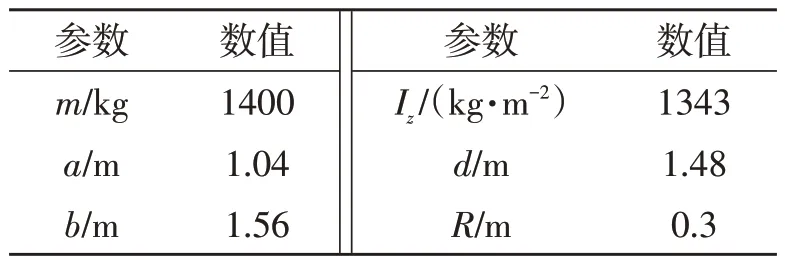
表1 车辆基本参数
1)正弦输入工况 初始车速设为100 km·h-¹,路面附着系数为0.8,在5 s 时左前轮电机完全失效,即k1为0。从图3a 可以看出,在5 s 时电机失效,无控制时出现突变,容错控制时快速跟踪理想值。由图3b可知,无容错控制时车速明显降低,在容错控制下车辆稳定跟随目标车速。从图3c可以看出,容错控制下质心侧偏角绝对值的最大值为0.6°,车辆处于稳定状态。从图3d可以看出,在5 s时左前轮失效,输出转矩为0 N·m。此时容错控制策略发挥作用,重新分配正常电机的驱动转矩,正常电机的转矩输出均变大;同时为了保证车辆的稳定性,左后轮转矩进一步增大,弥补左前轮失效对车辆性能的影响。

图3 不同输入工况联合仿真结果
2)双移线输入工况 初始车速设为85 km·h-¹,路面附着系数为0.3,5 s后左前轮电机完全失效,即k1为0。从图3e 可以看出,电机故障时,容错控制器能有效跟踪驾驶员的期望值,相较于无控制,明显减小车辆的跑偏距离。由图3f~g 可以看出,电机失效时,有容错控制器的车辆能较好地跟踪参考纵向速度和横摆角速度,保证了车辆的动力性和稳定性。由图3h可看出,5 s时左前电机完全失效时力矩输出为0 N·m,容错控制器起作用进行力矩重新分配,此时左后电机输出力矩增大,补偿由于电机故障所缺的力矩,保证车辆稳定行驶。
4 硬件在环仿真试验
为了进一步验证容错控制策略的有效性和可靠性,建立硬件在环(HIL)仿真平台并进行试验。硬件在环仿真系统如图4所示。

图4 硬件在环仿真系统结构
1)正弦输入工况 初始车速设为80 km·h-¹,路面附着系数为0.8,开始时左前轮电机完全失效,即k1为0。由图5a~b可知,有容错控制器的车辆在电机失效时都能较好地跟踪目标参考值,满足车辆的动力性和横摆稳定性要求,而无控制时均出现了较大的偏差。由图5c可知,在电机出现故障时,相较于无控制,有容错控制的车辆纵向速度与目标参考值的偏差大幅减小,更好地满足车辆的动力性要求。由图5d可知,左前电机故障时,容错控制器重构力矩分配,左后电机力矩输出变大,补偿由于左前电机失效所缺的力矩,保证故障车辆的稳定性和动力性。
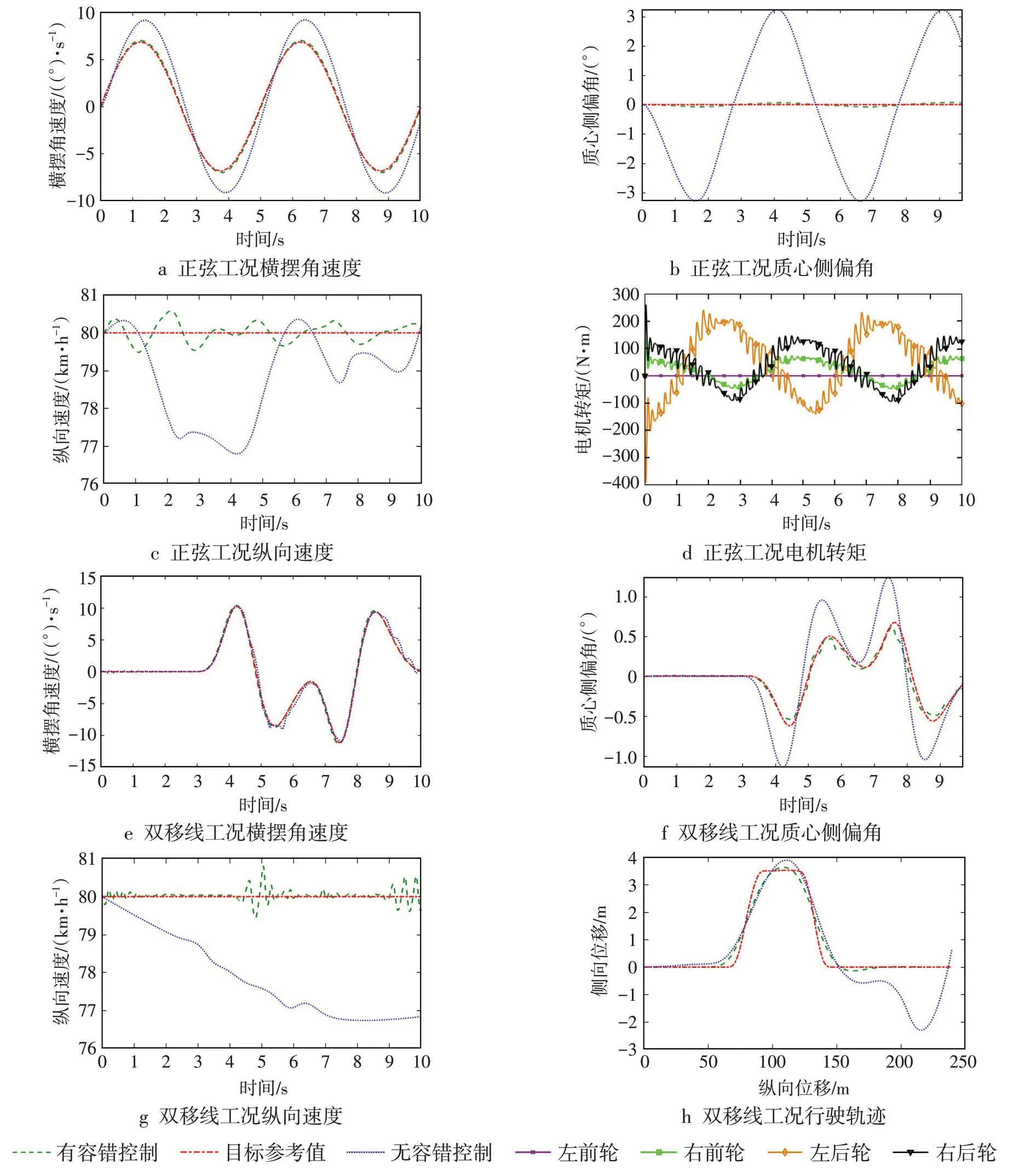
图5 不同输入工况硬件在环测试结果
2)双移线输入工况 初始车速设为80 km·h-¹,路面附着系数为0.3,开始时左前轮电机完全失效,即k1为0。由图5e~f 可知,电机失效时有容错控制的车辆能精准跟踪目标期望值,保证车辆的稳定性。由图5g 可知,有容错控的纵向速度偏差小于1%,且逐渐趋近目标参考值,满足车辆的动力性要求。从图5h可看出,电机故障时,无控制的车辆有侧滑趋势,而在容错控制下,车辆能迅速趋近目标参考值,回到期望路线,保证故障车辆的稳定性。
5 结论
针对分布式电动汽车电机失效带来的车辆行驶安全性问题,提出基于故障诊断的容错控制策略和故障诊断方法。文中提出了电机失效故障因子,设计了电机故障诊断方法,建立了电机失效因子和失效模式确定方法,实现了分布式电驱动系统电机故障的主动诊断功能;设计了考虑故障约束的驱动力矩优化分配算法,将电机的失效因子引入力矩分配控制策略,并进行驱动力矩二次规划优化分配,使分布式电驱动车辆在任何电机故障模式都能够保证车辆的稳定性和动力性,提高了汽车的行驶安全性;进行了车辆动力学仿真和硬件在环仿真试验,结果表明:在给定的行驶工况和单电机故障模式下,基于故障约束的主动容错控制策略能获得良好的控制效果,证明了主动容错控制策略的正确性和具有电机失效容错功能的整车控制器的可靠性。