顾及要素特征的机载激光点云道路断面提取算法
2023-12-28李艳杨少艳屈仁飞谢燕梅成都航空职业技术学院四川成都6099成都西南交大研究院有限公司四川成都6003
李艳,杨少艳,屈仁飞,谢燕梅 (.成都航空职业技术学院,四川 成都 6099;.成都西南交大研究院有限公司,四川 成都 6003)
0 引言
道路交通行业是支持社会经济发展的基础和重要命脉,随着社会的进步和经济的发展,道路修建呈现高质量快速发展的态势。道路勘测设计的工作量在逐年增加,对道路的测量精度与效率要求越来越高。道路断面测量可以为道路规划、设计、施工、勘测、管理等工作提供基础数据保障,可以综合考虑城市交通方式、土地利用、景观绿化、地下管线等因素对道路横断面设计的影响[1],对道路持续健康发展有着不可磨灭的贡献。
传统的道路线路测量工作外业依靠全站仪、RTK(Real-Time Kinematic)、全球导航卫星系统(Global Navigation Satellite System,GNSS)等测量技术[2],完全依赖人工进行定距、定量实测,在山区植被密集和人员无法到达地区采集数据精度较低。内业人员利用南方CASS等软件展开外业测量的数据,进而绘制道路断面图,须进行大量横纵断面数据编辑与优化工作[3]。由于外业测量的恶劣环境和内业软件支持点数量的限制,从而导致道路断面不能准确体现道路及两侧的真实地形、地物情况。
激光雷达(Light Detection and Ranging,LiDAR)以激光器为发射光源,发射高频率激光脉冲到被测物表面,以光电探测器为接收器件,接收被测物表面返回的回波信息[4]。相比较传统的道路线路测量,机载激光雷达系统将Li-DAR 系统搭载于固定翼飞机、直升机、无人机等飞行平台,可以全天候作业,快速地获取高精度、高密度的地物三维激光点云数据。通过获得精准的数字高程模型(Digital Elevation Model,DEM),在DEM 的基础上可实现高精度中桩横断面提取。
为实现道路断面图自动生成,国内外学者提出了许多基于LiDAR点云的道路断面提取方法[5],主要分为三种,第一种是数字等高线法,采集断面线与等高线的交点,获取该点的距离和高程值,从而生成断面图[6];第二种是规则格网DEM(Digital ElevationModel)插值法,通过布设断面线,断面线与规则格网DEM 逐网格插值,提取断面地形数据[7];第三种是TIN(Triangulated Irregular Network)求交法,从海量点云数据中快速提取构建约束三角网,通过逐点插入法,实现局部Delaunay 三角网的快速构建,最后根据三角网拓扑关系,实现断面线与TIN 的快速求交,生成并优化地形断面图[8]。以上方法都是将LiDAR 点云插值成等高线或格网之后,再通过断面线与等高线或格网进行求交或二次插值,从而得到断面图。在插值的过程中,会造成精度损失,且在提取断面信息时,没有充分考虑保留地形特征。
1 机载激光雷达系统
机载激光雷达系统主要由激光扫描系统、GNSS、惯性导航系统和监视及控制系统组成[4]。
激光扫描系统由激光发射器、激光接收机和机械扫描装置组成。激光发射器发射出激光,机械扫描装置快速转动,激光经过反射与折射形成激光束,从不同的方向发射出去,经地物反射回来,最后由激光接收机接收反射回来的激光,从而确定地物到激光器的距离、回波数量以及激光回波强度等信息。
GNSS 是能在地球表面或近地空间的任何地点,为用户提供全天候的三维坐标和速度以及时间信息的空基无线电导航定位系统[9],其在机载激光雷达系统中有三个作用,分别是与惯性测量单元(Inertial Measurement Unit,IMU)和激光器保持时间同步,与IMU 组合导航,提高位姿精度,提供导航数据给飞行平台。
惯性导航系统(Inertial Navigation System,INS)主要包括IMU 和导航处理器,其作用是测量激光发射器发射激光时刻的扫描仪姿态信息,包括俯仰(pitch)角、侧滚(roll)角和航向(heading)角,与GNSS 一起组成定位定姿系统(Position and Orientation System,POS),提供精确的位姿信息。
监视及控制系统主要是对激光扫描系统、GNSS、惯性导航系统的工作状态进行监视与控制,在协调三者同步工作的同时,对获取的数据进行存储。
2 特征道路断面提取
2.1 道路要素特征信息
传统道路断面提取时,使用的道路中线包含里程、中桩桩号及其平面坐标。里程是指道路中线上的任意一点沿该道路中线到起点里程的水平距离。中桩桩号,又称里程桩桩号,中桩是指钉设在道路中线上注有里程的桩位标志,中桩桩号则是中桩上所标注的里程,以公里数和公里以下的米数相加表示,若里程为201911.24m,则该桩的桩号记为K201+911.24,是用于确定道路位置的辅助定位手段。
中桩可分为整桩和加桩。整桩是由道路的起点开始,每隔10m、20m 或50m 的整倍数桩号设置的里程桩,其中里程为整百米的称百米桩,里程为整公里的称公里桩。加桩可分为地形加桩、地物加桩、曲线加桩和关系加桩等。地形加桩是在中线地形变化处设置的桩。地物加桩是在中线上桥梁、涵洞等人工构造物处以及与其它地物交叉处设置的桩。曲线加桩是在曲线各主点设置的桩。关系加桩是在转点和交点上设置的桩。
所有中桩中,对道路位置起控制作用的桩点可视为中线控制桩,通常直线上的控制桩有交点桩(JD)和转点桩(ZD),曲线上的控制桩有直圆点(ZY)和圆直点(YZ)、直缓点(ZH)和缓直点(HZ)、缓圆点(HY)和圆缓点(YH)、曲中点(QZ)。
传统道路断面提取只考虑了道路本身的位置信息,为了给设计规划部门提供更加全面的道路断面信息,需要引入道路沿线两侧的地形、地物等信息,包括房屋、桥洞、耕地、坡坎、河流、池塘等。
2.2 特征横纵断面生成
道路断面提取是对某一方向剖面的地形起伏进行测量的工作,通常分为道路横断面测量与道路纵断面测量,其最终目的是得到特定位置点的高程值与属性值。道路横断面图指的是经过中桩处并垂直于道路中线方向的表示地面起伏的剖面图。道路纵断面图指的是经过道路中线,表示道路起伏的剖面图。断面测量可为路基设计、计算路基土石方量、布置人工构筑物以及施工放样提供依据。
图1 为道路断面提取算法的流程图,算法流程中有以下四点说明。

图1 道路断面提取算法流程图
①以las 文件及dwg 文件为输入,其中las必须是包含地面点,dwg文件需要包含中线数据。
②以地面点新建点云(z=0),将输入点云的地面点以高程为0 新建一个点云,通过八叉树近邻搜索[10]快速获取已知点(x,y)周围的近邻点,从而为计算断面点高度提供一个快速有效输入。
③等间隔计算,采用平面拟合或高斯拟合计算点的高程,得到断面线上特定位置点的高程值。
平面拟合,拟合一个三维平面,输入(x,y)得到z 值。须满足以下两个条件,a.最近两个近邻点与其余近邻点构成的二维平面三角形中包含断面点,b.满足条件a 的三个点高程差不能大于一定值。
高斯拟合,以近邻点到输入点的水平距离作为高斯拟合系数,高程值作为输入,得到输入点高程。使用条件是所有近邻点须满足平面拟合条件。
④特征点计算,根据地形高程变化,得到有明显地形变化点,从而减少断面点输出。满足以下任意条件则为特征点,点出现前后点断层情况、水平距离超过一定值没找到特征点、点与最近特征点构成弧度值和点与后几个点构成弧度值有明显差值。
3 试验与结果分析
使用固定翼无人机搭载激光雷达系统,如图2 所示,获取到53km 道路的激光点云数据,通过点云分类后,得到36784913 个地面点,部分数据如图3 所示。

图2 固定翼无人机搭载激光雷达系统

图3 道路las点云数据
使用Qt、C++开发的点云处理软件对该点云进行道路断面提取。在处理器为Intel(R) Core(TM) i7-8650 CPU @1.90GHz 2.11GHz、RAM 为16.0GB、系统类型为64 位操作系统的计算机配置下,对本文算法进行测试。导入具有道路中心线图层的dwg 或者dxf 文件,输入里程相关参数生成里程点,提取道路横断面图,耗时0.25s,如图4所示。

图4 生成道路断面图
为验证道路断面图的精度,采用现场RTK 实测50 个横断面,纵断面54.7km。实验将LiDAR 点云插值生成1:1000 规则格网DEM,格网间隔1m,再分别采用规则格网DEM 插值法和本文方法提取道路断面图,然后将现场各横断面实测点投影到各断面图,统计横断面平面中误差和高程中误差,对比结果如表1 所示。可见,本文算法提取的道路断面图精度优于规则格网DEM 插值法。
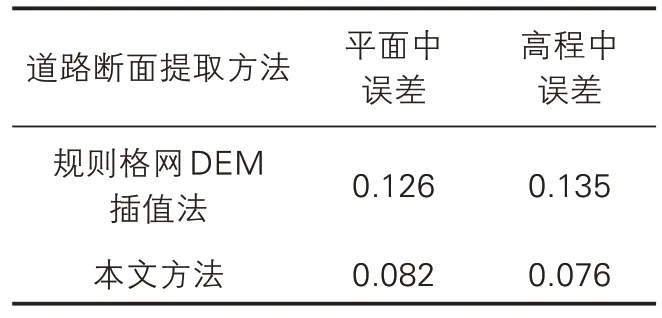
表1 道路断面提取方法对比(单位:m)
4 结语
本文的道路断面提取方法融合传统道路断面测量流程,基于高精度、高密度的激光雷达地面点,保证了道路两侧地形地物的完整性,断面成果不存在漏边坡高程特征点的情况,且成果具有地物属性点,断面成果能直接反映出周边地形地物情况。基于机载激光点云的道路断面提取算法,顾及了地形地物要素特征,其横断面平面中误差0.082m,横断面高程中误差0.076m,满足设计及规范要求,为道路规划、设计、施工、勘测、管理等工作提供基础数据保障。
