三吊舱船舶尾部附体对性能影响与螺旋桨功率不平衡分析
2023-12-27邹康桂满海赖明雁
邹康,桂满海,赖明雁
(上海船舶研究设计院,上海 201203)
在船舶设计阶段,推进方式的确定受到很多因素的影响,例如,总布置、船舶吃水、快速性、系柱拖力、操纵性、动力定位,以及经济性等。随着航速和拖力要求越来越高,船舶推进功率越来越大,其中一些船舶往往需要采用3桨甚至多桨推进方式,以便满足设计要求。
针对多桨推进的研究,目前大多基于模型试验,开展多桨推进器干扰、阻力分配,以及自航因子的计算和分析[1-3],其中涉及3吊舱推进船舶尾部附体形式对船舶水动力性能的影响,以及3吊舱推进的螺旋桨吸收功率不平衡特性的研究未见报道。
为探讨分析3吊舱船舶不同尾部附体形式对水动力性能的影响,以及螺旋桨吸收功率的不平衡特性,以某3吊舱推进船舶为例,通过与荷兰MARIN水池以及ABB公司开展合作,针对3吊舱这一推进方式,开展了尾部附体的研究,首先分析多种尾部附体形式的影响和特点,继而确定适合所研究船型特点的尾部附体方案。在此基础上,采用计算流体动力学(CFD)方法计算附体受力特征,基于船舶阻力性能对附体安装角度进行对比分析和优化;此外,考虑到三桨船特有的推力和功率不平衡问题,基于CFD方法,开展目标船系柱状态和航行状态下3桨之间的推力和功率不平衡问题研究。
1 不同尾部附体形式对比
目标船尾部配备3个吊舱式推进器,考虑到尾部布置空间等因素,采用舷侧2个推进器靠前,中间推进器靠后的布置方式,见图1。分别从快速性、操纵性和动力定位3个方面对4种尾部附体形式进行对比分析。

图1 尾部推进器和附体布置平面示意
如图1所示,方案1 为无附体形式;方案2和方案3分别为单呆木和双呆木形式;方案4为双尾翼形式。上述4种方案基本涵盖了3吊舱推进船舶目前常用的尾部附体形式。
关于附体对船舶水动力性能的影响,主要通过定性方法进行分析,就阻力而言,参照船舶阻力模型试验的处理方法[4],主要考虑附体的湿面积对阻力的影响,湿面积越大则认为阻力增加越多;操纵性主要考虑尾部附体对水下侧投影面积的影响[5],尾部附体侧投影面积越大,航向稳定性越好;动力定位性能则主要考虑附体对推进器的干扰[6],附体越多,距离推进器越近,则推进器的推力禁区范围越大,对动力定位性能越不利。
方案1,未采用任何附体,从阻力和快速性角度来看,该方案船体湿表面积最小,阻力性能较好;从动力定位角度而言,该方案无需考虑尾部螺旋桨和附体之间的干扰,仅需要各螺旋桨之间的干扰,因此螺旋桨的推力禁区范围较小,对动力定位能力有利;从操纵性方面考虑,该方案尾部水下侧投影面积较小,船舶的航向稳定性最差。
方案2,通过增加尾部单呆木,相对方案1而言,可以有效提高船舶的航向稳定性;但增加呆木也会增加湿表面积,从而增加阻力,并且呆木会对中间螺旋桨的进流带来不利影响;同时,呆木的存在,也会增大动力定位工况时尾部螺旋桨的推力禁区范围。
方案3,采用双呆木形式,可以一定程度上避免单呆木对中间推进器进流带来的不利影响,并且可以进一步改善船舶的航向稳定性,但在动力定位工况下,双呆木会使得尾部螺旋桨推力禁区范围增大,同时阻力也会较单呆木更大。
方案4,为双尾翼方案,相较于单呆木而言,对阻力的影响相当,但对螺旋桨进流的影响更小,并且航向稳定性比单呆木更好,介于单呆木和双呆木之间;就动力定位工况而言,双尾翼对螺旋桨推力禁区范围的影响较双呆木形式更小。
上述4种尾部附体形式在快速性、操纵性和动力定位方面各有特点,需要结合目标船型需求综合考虑。从定性角度对比上述4种附体形式的各自优缺点,见表1。

表1 不同附体形式性能对比
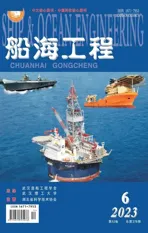
综合考虑上述4种附体的特点,以及目标船在快速性、操纵性以及动力定位方面的需求和特点,尾部适宜采用双尾翼形式,见图2。
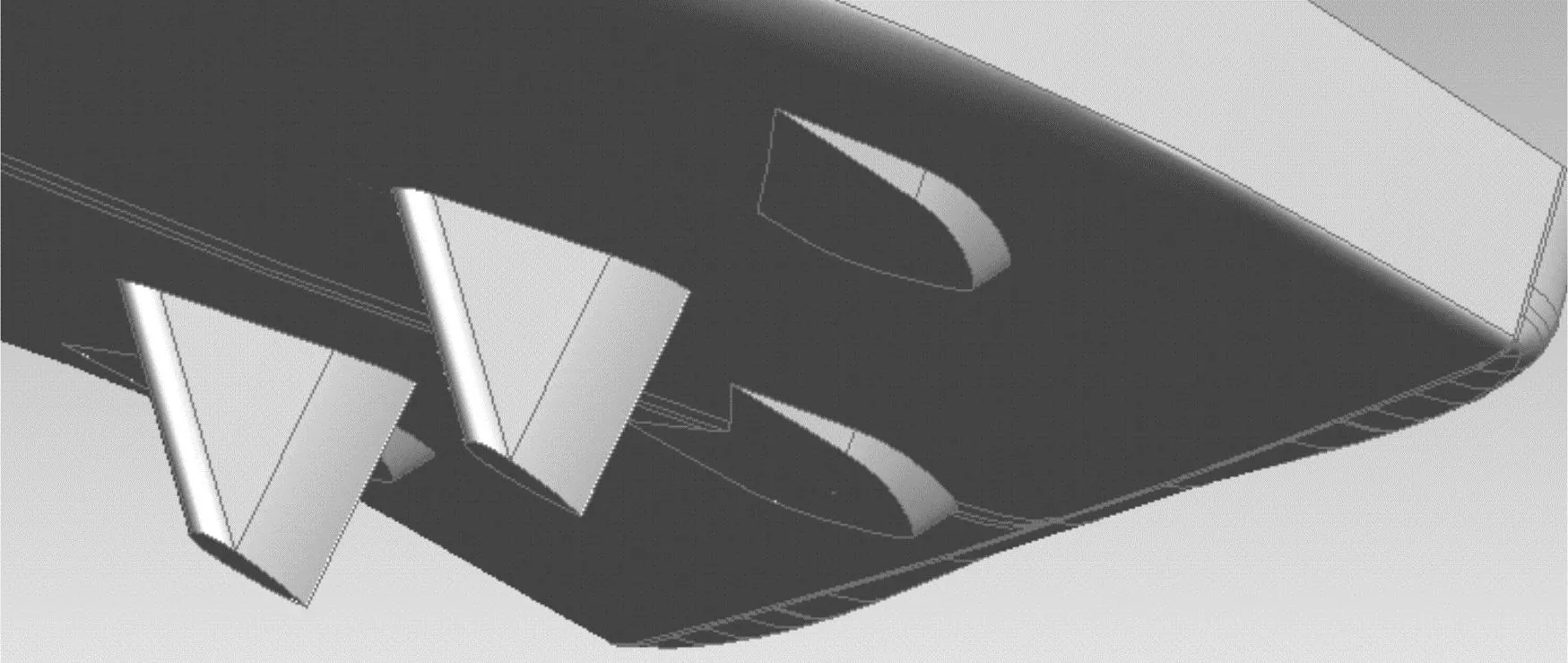
图2 双尾翼附体示意
2 双尾翼安装角度优化
为了降低双尾翼对快速性的影响,采用计算流体动力学(CFD)方法,基于船舶阻力对双尾翼的安装角度进行对比分析。
2.1 阻力计算模型与参数
因目标船以及附体具有对称性,因此CFD仅计算一半区域。计算域的尺度为:船首距离计算域入口边界约2倍船长,船尾距离计算域出口约3倍船长,侧边界距离船舶中纵剖面约2.5倍船长,水线距离顶部边界1倍船长,距离底部边界约2.5倍船长,计算在模型尺度下进行,缩尺比为1∶18,计算航速为设计航速。
计算采用Trimmed非结构化网格,近壁面设置边界层网格,船舶首尾以及双尾翼附近进行加密,自由面网格也进行加密,船体周围网格向外逐渐稀疏,见图3、4。

图3 阻力计算域网格划分示意

图4 尾部及尾翼局部网格加密示意(左舷)
边界条件类型为:计算域左侧入口、顶部、底部以及侧边界均为速度入口;计算域右侧为压力出口;船舶中纵剖面所在边界为对称面边界条件。
参考类似船型采用CFD方法计算阻力的研究成果[7],计算域网格数约150万,无量纲壁面距离y+取值约40,采用SSTk-ω湍流模型,自由面计算采用VOF方法。
2.2 计算结果分析
通常而言,尾部附体顺着流体的流线方向布置会比较好地减少附体对流场的干扰。通过尾部双尾翼两侧的动压分布以及尾翼受到的侧向力来分析尾翼安装的角度;此外,还分析了不同尾翼安装角度的船舶剩余阻力系数Cr,分析安装角度对阻力的影响。
尾翼安装角度0°时(沿船长方向安装),尾翼两侧和尾部附近动压力见图5,为了便于显示,对船体左右舷进行对称。

图5 安装角度0°时尾翼两侧动压云图
由图5可见,尾翼两侧动压力分布差异较大,对于左舷尾翼而言,其左侧为压力面,右侧为吸力面,因此安装角度为0°时,尾翼与等效平均来流存在一定攻角。
为了减少与来流的攻角,开展6个不同尾翼安装角度的计算,从1°~6°,间隔1°,尾翼前缘向舷侧偏转定义为正。不同尾翼安装角度下两侧动压见图6。

图6 不同尾翼安装角度下尾翼两侧动压云图
从图6来看,随着安装角度的增大,左舷尾翼左侧逐渐由压力面变为吸力面,安装角度为3°时,尾翼两侧压力分布接近基本相当。进一步分析左舷尾翼受到的侧向力,见图7。

图7 不同尾翼安装角度下尾翼侧向力(模型尺度)
图7显示,计算角度范围内,尾翼侧向力随着安装角度的变化基本呈现线性变化趋势,侧向力为0时对应的尾翼安装角度约为2.7°,此时尾翼两侧动压分布基本相同,见图8。

图8 安装角度2.7°时尾翼两侧动压云图
分析不同尾翼安装角度对船舶阻力性能的影响,船舶剩余阻力系数Cr随尾翼安装角度的变化见图9,其中剩余阻力系数采用二因次法求得。

图9 不同尾翼安装角度的船舶剩余阻力系数
从图9结果来看,剩余阻力系数随着尾翼安装角度的增大,呈现先下降,后升高的趋势,在安装角度3.5°附近,剩余阻力系数基本达到最小值,较0°安装角约降低2.7%。
对比图7和图9可以看出,尾翼侧向力为零时,船体剩余阻力系数并非最小,这可能是因为不同安装角度下,尾翼对船体表面压力分布以及尾部流场的影响不同所造成的,侧向力为零时,对剩余阻力并非最有利。
3 推力与功率不平衡分析
针对3吊舱推进器的推力与功率不平衡问题,采用计算流体动力学(CFD)方法,基于优化后的附体安装角度,开展系柱和航行状态下3个推进器之间的推力和功率计算与分析。
3.1 带推进器计算模型与参数
由于考虑了螺旋桨,CFD计算需要考虑全船。计算采用实尺度叠模,近壁面设置边界层网格,船舶首尾以及推进器附近进行适当加密,船体周围网格向外逐渐稀疏,计算域尺度为:船首至计算域入口边界约2倍船长,船尾距计算域出口边界约6倍船长,计算域宽度约8倍船长,计算域高度约3倍船长,计算域以及局部网格加密见图10。计算域边界条件类型为:船首方向、底部以及侧边界均为速度入口,船尾方向为压力出口,顶部为对称面边界条件,网格数约4 000万,采用SST k-ω湍流模型。两侧桨旋向为外旋,中间桨为右旋,3个推进器尺度参数相同。
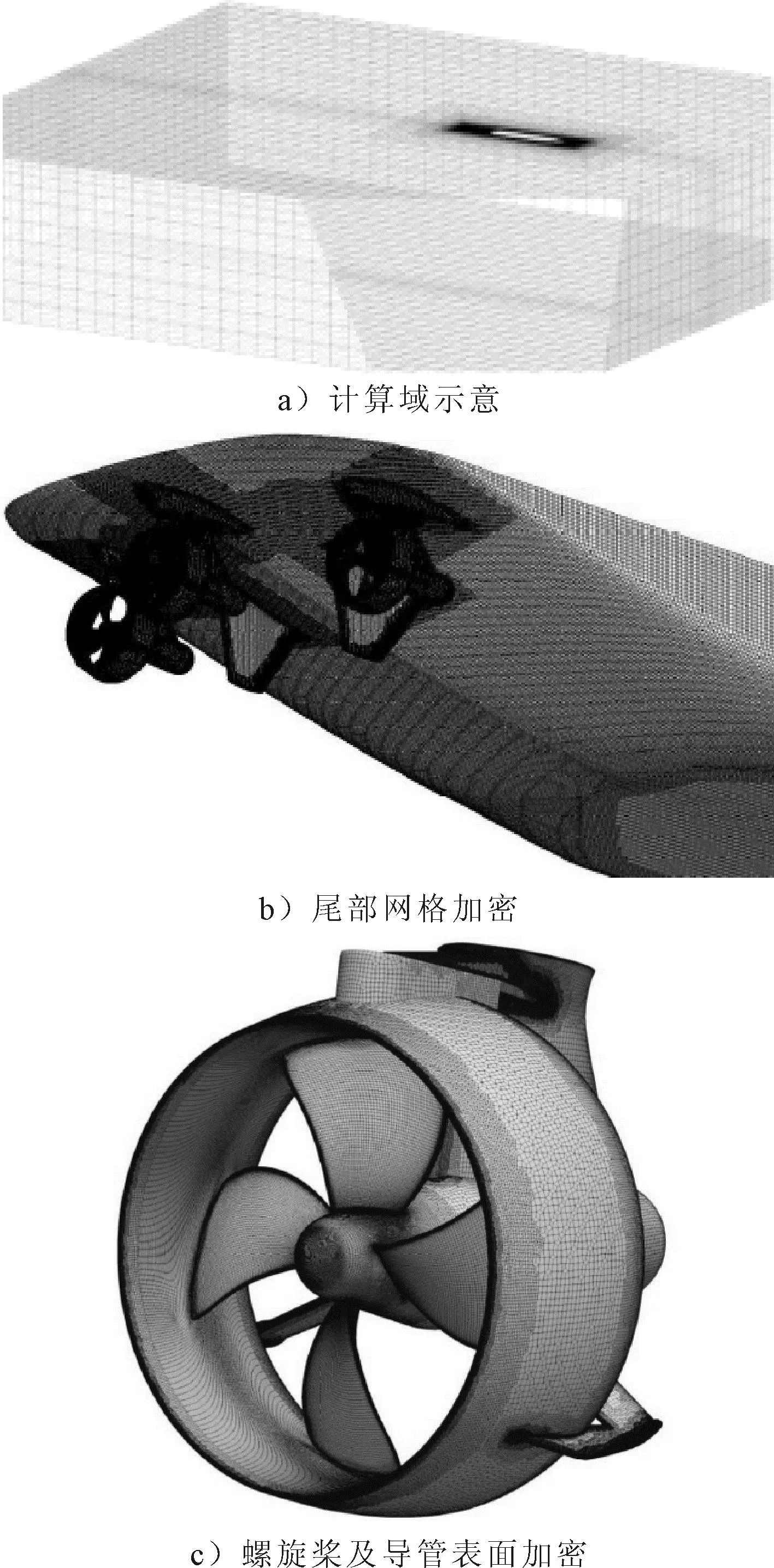
图10 带推进器计算域及局部网格加密示意
计算采用荷兰MARIN水池的ReFRESCO程序进行,该程序基于RANS方法,能够进行稳态以及瞬态流场的模拟分析。
3.2 系柱状态三桨推力及功率分析
针对船舶零航速系柱状态,进行两种螺旋桨转速组合的计算,见表2。

表2 系柱状态螺旋桨转速组合
转速组合2,不同剖面处的轴向速度见图11。两侧推进器(含导流管)产生的推力和吸收功率与中间桨的比值和不平衡百分数见表3、4。表中不平衡百分数定义为两侧桨产生推力或吸收功率与中间桨差值占中间桨推力或功率的百分数。

表3 系柱状态两侧桨与中间桨发出推力比值

表4 系柱状态两侧桨与中间桨吸收功率比值

图11 系柱状态不同剖面轴向速度云图示例
从计算结果来看,当螺旋桨转速相同时(对应转速组合1,179 r/min),两侧螺旋桨产生的推力较中间桨小,最大不平衡百分数约2.4%,此时螺旋桨吸收功率的不平衡百分数约1.5%。为了使得各推进器吸收功率相当,需要调整螺旋桨转速,当适当降低中间桨转速(转速组合2)时,各推进器发出推力和吸收功率基本一致,最大功率不平衡百分数约0.4%,推力不平衡百分数约1%。
总体而言,系柱状态下两侧桨与中间桨的推力和功率平衡性较好,相同转速下中间桨吸收功率略高。这主要是因为系柱状态下,船体对螺旋桨进流的影响较小,中间桨处的伴流略大。因此,系柱状态下三桨的进流状态相当,相同转速下的推力和功率差别不大,中间桨略高。
3.3 航行状态3桨推力及功率分析
针对船舶航行状态,进行了3种螺旋桨转速组合的计算,见表5。船舶航速为设计航速,计算采用强迫自航法。
表5 航行状态螺旋桨转速组合
航行状态转速组合3,不同剖面处的轴向速度见图12,与图11对比发现,航行状态轴向速度形式与系柱状态有明显差别。

图12 航行状态不同剖面轴向速度云图示例
两侧推进器(含导流管)产生的推力和吸收功率与中间桨的比值和不平衡百分数见表6、7。表中不平衡百分数定义为两侧桨产生推力或吸收功率与中间桨差值占中间桨推力或功率的百分数。
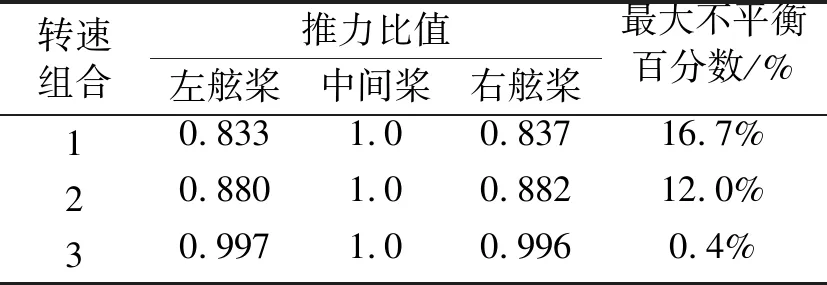
表6 航行状态两侧桨与中间桨发出推力比值
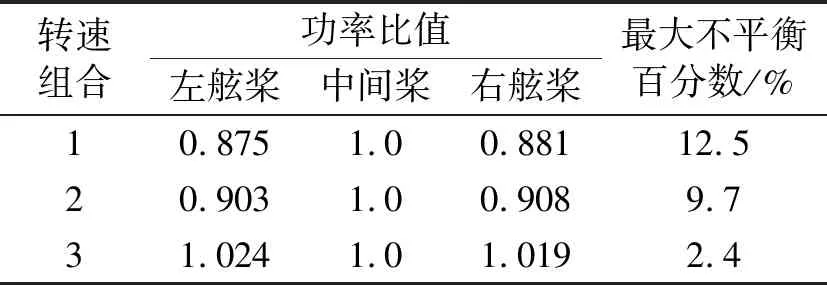
表7 航行状态两侧桨与中间桨吸收功率比值
从计算结果来看,当螺旋桨转速相同时(对应转速组合1,168 r/min),两侧螺旋桨产生的推力较中间桨小,最大推力不平衡百分数约16.7%,此时功率不平衡百分数约12.5%,航行状态功率不平衡百分数相较系柱状态显著增加。通过降低中间桨转速,可减小三桨之间的功率不平衡,如转速组合2,中间桨转速较两侧降低0.5 r/min,此时功率不平衡百分数约9.7%,功率不平衡有所改善,当中间桨转速较两侧桨降低4 r/min时,如转速组合3,此时功率不平衡进一步改善,不平衡百分数约2.4%。
计算采用强迫自航法,上述3种转速组合并非对应实际船舶自航点,考虑实际航行操作惯例,3桨转速取相同值,通过预报可得实船设计航速自航时三桨转速为181.6 r/min,此时3桨的推力和功率比值以及不平衡百分数见表8。

表8 设计航速自航点两侧桨与中间桨推力/功率比值
从预报结果来看,实船设计航速航行时,两侧桨与中间桨的功率不平衡百分数约10.4%,推力不平衡百分数约13.5%。
总体而言,与系柱状态类似,相同转速下,中间桨吸收功率较两侧桨更高,但航行状态的推力和功率不平衡百分数较系柱状态明显增加,这主要是因为航行状态下,船体对螺旋桨进流的影响较大,中间桨处的伴流较高,与两侧桨差别较大,因此相同转速下中间桨进速系数更小,因此产生的推力和吸收功率也相对更大。从上述算例还可以看出,通过调整中间桨和两侧桨的转速,改善了螺旋桨推力和功率的不平衡,如表5中转速组合3,通过降低中间桨转速,增加两侧桨转速,显著降低了航行工况下3桨的功率不平衡百分数。
4 结论
1)双尾翼相较于单呆木对阻力的影响相当,但对螺旋桨进流的影响更小,并且由于尾翼的侧面积形心距离船中更远,因此航向稳定性比单呆木更好,介于单呆木和双呆木之间;就动力定位工况而言,双尾翼对螺旋桨推力禁区范围的影响较双呆木形式更小,双尾翼形式较为适合所研究的3吊舱船型。
2)从船舶阻力的角度对尾翼安装角度进行优化,确定阻力最低的安装角约3.5°,同时发现尾翼侧向力为零时船体剩余阻力系数并非最小,可能是因为安装角度不仅影响尾翼本身的侧向力和阻力,而且影响船体表面压力分布,同时也说明尾翼对阻力的影响需要结合船体一起考虑。
3)系柱和航行工况下,相同转速中间桨吸收功率均高于两侧桨,航行工况的功率不平衡百分数约10.4%,明显高于系柱状态,这主要是因为两种状态下船体对螺旋桨进流的影响不同所造成的,航行状态下中间桨与两侧桨的伴流差别更大,因此功率不平衡也更加明显。
4)调整中间桨和两侧桨的转速,是改善三桨之间功率不平衡的有效手段,通过调整吊舱推进电机的转速,可以达到平衡各推进器功率的目的。