影响空间机械臂遥操作任务绩效的关键因素研究
2023-12-27周晓艳黄伟芬冯静达王焰磊
周晓艳,黄伟芬*,冯静达,刘 峰,王焰磊,张 相,姚 志,郑 剑,赵 静
(1.中国航天员科研训练中心,北京 100094; 2.航天工程大学宇航科学与技术系,北京 101416)
1 引言
中国空间站配备了2 种空间机械臂:核心舱机械臂和实验舱机械臂,其中核心舱机械臂规模大且承载能力强,能够完成大负载搬运、大范围转移、舱段转位对接等任务;实验舱机械臂灵活小巧,能够完成载荷安装等精细化操作任务[1-2]。空间机械臂通常采用在轨遥操作和地面遥操作相结合的方式完成控制,随着遥操作、力反馈等技术日趋成熟,具有高度临场感的手动控制模式(简称手控),可用于机械臂的实时遥操作,解决空间动态复杂不确定任务作业的操作难题[3]。
在目前执行的数次空间站飞行任务中,航天员对手控机械臂完成末端操作任务进行了技术验证,手控方法包括点动控制、手柄控制、多关节联动控制以及预编程控制等,不同控制方法适用的任务情境各有差异,对航天员能力要求也不尽相同[4]。考虑到载人登月任务和深空探测任务的进一步发展,航天员会面临更多复杂工况下的空间机械臂操作,基于操作者对于输入信息认知和判断的机械臂手控遥操作是空间机械臂必不可少的操控方式。
机械臂操作任务研究通常采用机械臂移动(Fly-to)模型[5]和捕获(Target Acquisition)模型,本质上都是对机械臂末端作用器在三自由度(3-DOF)至六自由度(6-DOF)维度上进行平移或姿态偏差调整的模型[6]。薛书骐等[7]研究了机械臂手柄操作中的11 项客观绩效指标,发现引入数值信息对多项指标有提升作用,手柄控制效率指标能够预测操作用时以及到达限位位置风险等核心指标。Akagi 等[8]在三自由度实验条件下研究了任务时间、矫正时间、运动距离、反向运动距离、最大单轴速度、多轴运动时间比例等6 项绩效指标;Forman 等[9]研究了运动时间、多轴运动占比、操作流畅度等多项客观绩效指标,用于机械臂操作训练的绩效评估;Lamb 等[10]在基于虚拟现实的航天飞机遥操作仿真平台上进行手控操作实验,研究了任务时间、路径效率、操作失误、控制偏移程度等4 项绩效指标。国外研究重点关注各项绩效指标的优化和综合评价,缺乏对人的能力和绩效指标之间关系的探讨和研究[11]。
本文根据空间机械臂遥操作实际需求,选取了安装舱外全景相机的典型案例,考虑了六自由度的偏差调整模型,并且根据偏差程度来具体划分任务难度,更加符合空间站任务实际工况。本文从操作层面选取了3 种典型的机械臂手控方法,根据输入方式不同概括为指令、手柄和参数控制方法。其中,指令控制方法通过选取运动指令并发送的方法完成运动控制,手柄控制方法通过操作一对平移和姿态手柄完成运动控制,参数控制方法通过运动参数输入并发送的方法完成运动控制。
影响机械臂手控遥操作绩效的因素有很多,结合国内外操作经验和实例分析,发现控制方法、任务难度和技能水平是关键影响因素。本文针对控制方法、任务难度和技能水平开展了实验研究,通过客观绩效指标来定量分析影响情况。将Endsley[12]的情境意识理论融入到机械臂遥操作绩效指标研究中。情境意识理论定义了人对环境中各情景要素从感知到理解,再到预测的三阶段认知状态。本文根据操作者手控机械臂的人机交互过程[13],建立操作者从观察和感知,到判断和预测,再到决策和操作的完整流程,并通过6 项客观绩效指标对应流程中的各个环节,客观量化地反映操作者的能力水平,为航天员训练和评估、在轨操作任务设计提供参考依据。
2 方法
2.1 客观绩效指标
通过分析空间机械臂手控操作的特点,对机械臂手控操作过程和结果进行描述,提出了6 个可量化的客观绩效指标,如表1 所示。

表1 机械臂遥操作客观绩效指标Table 1 Objective performance metrics of manipulator teleoperation
失误率是单次任务中的平均碰撞次数,值越小安全性越高,能够反映操作者的安全意识和提前预判危险的能力;操作效率是操作者单位时间的操作次数,值越大频次越高,可反映操作者的操作能力;有效操作比率是正确方向上的操作占比,值越大有效率越高,可反映操作者的判断能力;复合操作比率是多维度操作占比,值越大效率越高,可反映操作者的空间认知能力;位置操作精度和姿态操作精度分别是位置和姿态达到目标要求的占比水平,值越大精度越高,可反映操作者的任务完成精度水平。
2.2 志愿者与实验分组
招募24 名志愿者(男性20 名、女性4 名),年龄25~40 岁,具有本科及以上学历,无空间机械臂操作经验,右利手,无色盲。根据空间认知能力测试成绩将志愿者平均分为2 组,每组12 名。对2 组志愿者进行有差别培训,2 组的技能水平差别是由差别化培训产生,区分为实验组和对照组,培训情况见实验流程。
2.3 实验设备
基于空间机械臂遥操作三维仿真平台开展空间机械臂手控遥操作任务,设备包括操作平台、笔记本电脑、显示器等。实验平台记录机械臂末端位置偏差、姿态偏差、操作完成时间、各方向操作次数等数据。笔记本电脑提供机械臂三维位姿显示和碰撞预警提示。显示器显示当前目标物体位置和姿态情况。
2.4 实验任务
选取空间站某全景相机作为参考目标,志愿者通过观察机械臂末端相机仿真图像(图1),操控机械臂末端运动至参考目标附近,当仿真图像中参考目标呈现出目标位姿状态时视为任务完成。参考目标右侧靠近太阳帆板,操作机械臂接近时有一定碰撞风险。实验任务设计兼顾了机械臂转移和精细调整等操作要求。实验任务有3 个作业点(作业点1、2、3),分别对应低、中、高3 种初始难度偏差,综合考虑机械臂末端定位精度等因素,在平移偏差累计上限为0.3 m,姿态偏差累计上限为20°的偏差范围内进行设计,如表2所示。

图1 全景相机仿真图像Fig.1 The simulated images of the panoramic camera

表2 低、中、高3 种难度的任务初始偏差设计参数Table 2 Design parameters for initial deviation of tasks with low,medium and high difficulties
2.5 实验流程
①空间认知能力测试。采用经典的Vandenberg 心 理 旋 转 测 试(Mental Rotation Test,MRT)[14]实验范式对全部志愿者进行测试。②理论培训。对2 组志愿者进行基础操作培训,讲解实验要求、设备界面、操作内容和方法;另外,单独对实验组志愿者进行操作技能培训,讲解认知和控制策略,使得实验组志愿者获得一定操作技能。③练习。所有志愿者在正式实验前使用每种控制方法进行1 次练习。④正式实验。所有志愿者均使用3 种控制方法,分别完成3 种难度的任务,每位志愿者共9 次操作。为避免疲劳对结果的影响,实验分3 次完成。为避免学习效应,实验顺序采用拉丁方平衡设计。
2.6 统计分析
使用软件SPSS Statistics17.0 对各项指标数据进行单因素和多因素方差分析、相关性分析和独立样本t检验。实验数据经过正态检验和方差齐性检验,符合方差分析的条件。P<0.05 认为差异具有统计学意义。
3 结果
客观绩效指标统计结果如表3 所示,可以看出:

表3 客观绩效指标平均值和标准差统计结果Table 3 Statistical results of mean and standard deviation for performance metrics
1)操作效率、有效操作比率、复合操作比率和失误率4 项指标在3 种控制方法下有显著的差异(F=70.426,P<0.001;F=23.917,P<0.001;F=140.610,P<0.001;F=4.203,P=0.016)。其中,指令控制方法在有效操作比率、姿态操作精度和失误率指标上优于其他控制方法;手柄控制方法在操作效率指标上优于其他控制方法;参数控制方法在位置操作精度和复合操作比率指标上优于其他控制方法。
2)位置操作精度、姿态操作精度等2 项指标在3 种任务难度下有显著的差异(F=50.070,P<0.001;F=30.826,P<0.001)。并且,有效操作比率、复合操作比率、位置操作精度和姿态操作精度等4 项指标平均值与任务难度呈现正相关关系,即难度越高指标平均值越大;操作效率的指标平均值与任务难度呈现负相关关系,即难度越高指标平均值越小。
3)对2 组志愿者的空间认知能力测试结果进行独立样本t检验,结果显示无显著差异(P=0.814)。对各项指标进行检验,发现有效操作比率指标在2 组志愿者之间有显著的差异(F=9.036,P=0.003),并且实验组志愿者的有效操作比率显著优于对照组,其他指标均无统计学意义上的显著差异。
4)对各指标之间进行相关性分析结果如表4所示,发现复合操作比率和失误率这2 项指标和所有效率指标都显著相关,而有效操作比率与除操作效率指标外的其他指标都显著相关。位置操作精度和姿态操作精度之间的显著相关性最高。

表4 与各项客观绩效指标相关性最显著的3 项指标及相关系数Table 4 The 3 most correlated other indexes to the performance metrics
5)控制方法、任务难度和技能水平之间的交互作用分析结果表明,交互作用对各指标均无显著影响(P>0.05)。
4 讨论
4.1 关键因素影响
根据实验结果结合实验设定分析控制方法、任务难度、技能水平对客观绩效指标的影响。
控制方法对机械臂操作的效率指标影响显著,对精度指标影响不显著。由于指令控制方法具有小步多次的操作特点,志愿者在操作过程中相对谨慎,导致操作次数较多,操作时间较长,但相反方向的往复操作相对较少,因此操作效率一般,有效操作比率较高,失误率较低。因而指令控制方法对操作者的判断能力要求不高,适合局部范围调整使用。手柄控制方法具有定量模糊、连续运动的操作特点,有一定操作难度,复合操作比率较低,有效操作比率一般,失误率较高,但操作效率最高。因而手柄控制方法对操作者熟练度要求较高,适合较大范围转移使用。参数控制方法具有定量明显,方向准确的操作特点,志愿者在操作过程中复合操作比率较高,相反方向往复操作较多,失误率也较高,有效操作比率和操作效率较低。因而参数控制方法对操作者熟练度有要求,适用于各维度与目标偏差较大的作业任务。
任务难度对机械臂操作的精度指标影响显著,对效率指标影响不显著。在精度指标中,位置操作精度和姿态操作精度随着任务难度提升指标值变大,说明难度越高精度反而更高。表1 中对精度指标的定义说明,精度指标与结果偏差指标和初始偏差相关。通过对结果偏差指标分析发现,3 种任务难度下位置结果偏差和姿态结果偏差差别不显著(P>0.05),说明精度指标的显著差异主要来源于初始位姿的偏差。并且,位置结果偏差和姿态结果偏差呈现高度正相关性(r=0.75)。进一步分析发现,精度偏差结果呈现个体差异,如图2 所示,由此推断操作精度水平可能与志愿者操作习惯和对精度的认知理解关联更大,实际与任务难度关联不显著。
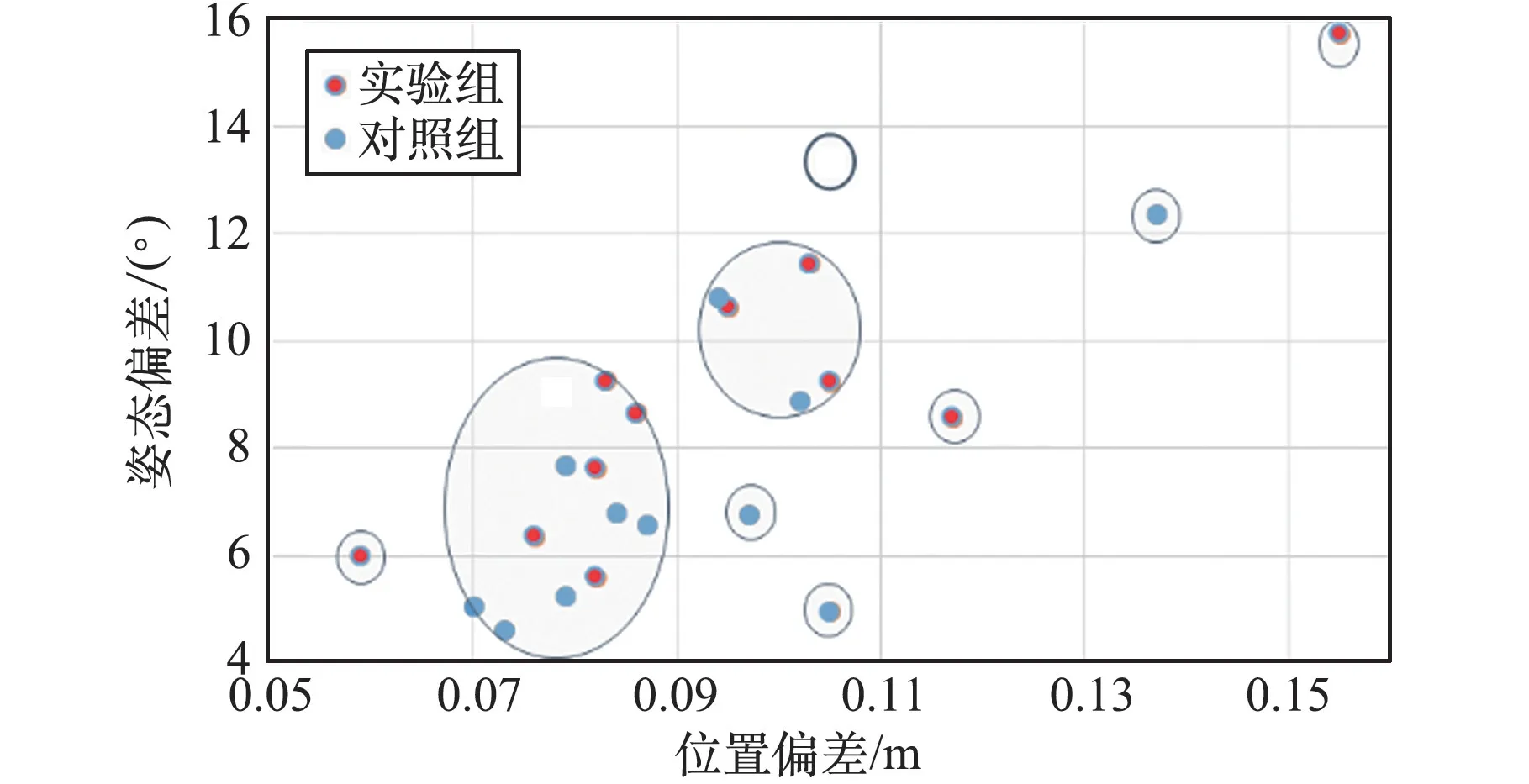
图2 志愿者位置和姿态操作结果偏差情况Fig.2 The operational results of subjects in position and attitude deviation
唐伟财等[15]研究表明,个体的空间认知能力对空间机械臂遥操作任务绩效有重要影响,在实验分组时根据测试成绩对2 组志愿者进行了平均分配,从而排除了个体影响。有效操作比率指标结果表明,技能水平较高的志愿者对目标物体位姿判断失误情况较少。技能水平的提高对机械臂操作的有效性提高有显著影响。
4.2 绩效指标分析
1)安全性指标。空间机械臂手控遥操作最大的安全威胁是误操作导致的碰撞,本文实验中的失误率指标反映了操作者在实验任务中的操作导致的碰撞情况。实验结果表明,失误率与效率指标有显著相关性,其中与复合操作比率呈现正相关,与有效操作比率和操作效率均呈现负相关,说明多维度的空间认知和判断会明显增加失误率,降低操作的安全性;而操作能力和判断能力越弱,失误率也会越高。
2)效率指标。执行太空任务效率是继安全之后重点考虑的方面,复合操作比率、有效操作比率和操作效率等3 项指标,可综合客观反映操作者操作过程中的空间认知能力、判断能力和操作能力。其中,复合操作比率对操作效率和有效操作比率有显著预测效果(表4),是考察操作效率的重要指标。
3)精度指标。位置操作精度和姿态操作精度客观描述了六自由度上操作结果情况。根据分析,精度水平的高低与任务难度及控制方法均无显著相关性,推断可能与个人操作习惯和对精度的认知理解有关。说明若想通过训练提高操作精度,需在增加训练强度提高操作熟练度的基础上,提供操作策略来优化操作习惯,提高操作者对精度的认知理解和敏感性尤为重要。
5 结论
面向空间站背景下的机械臂遥操作任务,通过分析和梳理手控操作流程中能够描述操作者表现的6 项客观绩效指标,基于空间机械臂遥操作三维仿真平台开展指令、手柄、参数3 种控制方法,低、中、高3 种难度任务和2 类技能水平的志愿者操作实验。结论如下:
1)指令控制方法有效操作比率较高,失误率较低,适合机械臂在局部范围内的精细调整时使用;手柄控制方法操作效率较高,但失误率较高,适合熟练操作者在机械臂较大范围转移时使用;参数控制方法复合操作比率较高,但是失误率较高,适合熟练操作者在各维度偏差较大,需要调整时使用。
2)任务难度对操作效率指标和安全性指标影响不显著,操作精度结果呈现个体差异,推断可能与志愿者操作习惯和对精度的认知理解关联更大,与任务难度实际关联不显著。因此,训练过程中不断提高操作者对精度的认知理解和敏感性比单纯的重复训练更重要。
3)操作技能水平对机械臂操作有效性有显著影响。训练过程中增加控制策略等操作技能的培训对减少错误判断、提高效率有很大帮助。