航天员上肢典型动作的动力学仿真与分析
2023-12-27殷梦馨汪圣伟李静文
殷梦馨,汪圣伟,叶 青,李静文,丁 立*
(1.武汉第二船舶设计研究所,武汉 430064; 2.中国矿业大学(北京),北京 100083;3.北京航空航天大学生物与医学工程学院,北京 100191)
1 引言
随着航天工业设计的人机交互智能化和精细化程度不断提高,以航天员为中心的工效学设计具有极其重要的作用[1-3]。由于执行航天任务时,航天员躯干及下肢运动较少,作业主要集中于上肢[4],如开启舱门、控制手动操作杆等涉及到人体上肢推拉动作,按钮、操控触屏显示界面过程中会涉及上肢点按等上肢典型动作。对人机交互系统的工效学来讲,这些动作的力学参数直接影响到航天员工作效率和安全性。因此,研究航天员人机交互过程中典型上肢动作力学问题具有重要意义。
目前,研究人员对人机交互系统的工效学评价进行了大量研究。Lardy 等[5]针对操作者与常用旋动部件之间的交互动作进行仿真研究,结果表明操作者会在进行旋动操作之前,事先估算旋动幅度,并做出上肢姿势的调整;Herbort 等[6]对旋钮操作中的上肢动作研究分析了前臂在动作中所起的作用;Schot 等[7]研究发现,当人在抓握球形控件时,上肢的抓握姿势很大程度上取决于球形控件的初始位置,而不是人手的初始位置。Kingston 等[8]研究了在使用复合计算机工作平台时,不同工作面种类对上肢姿势的影响。邱新安等[9]引入力反馈技术,较好地辅助航天员操控空间机械臂,提高了空间机械臂执行任务时的操作效率。朱博等[10]提出可收纳、可对折式的显示面板布局方式,解决了传统月球车固定式显示面板占用空间大、阻碍航天员上下车的问题。上述研究大多阐释人体(或上肢)在执行某种任务时动作选择的策略或者分析操作者手部的活动范围、舒适性等。但对于人机交互设计时,固定上肢舱内作业,而无人体其他部位的操作来讲,上肢运动及受力的动力学研究较少,以至难以根据人体受力情况进行优化设计。
本文针对航天员人机交互过程中的典型上肢动作的力学问题,对作业动作从上肢运动学与动力学进行分析,开展作业冗余自由度的优化算法研究。研究结果可为空间站舱门宽度设计、控制按钮高度布局等工效学评价提供参考。
2 人体上肢力学模型
2.1 多刚体模型及冗余自由度
人体运动学建模[11-12]时通常会忽略关节的复杂构造,采用铰链结构来进行计算,以达到有效简化目的。本文选用圆柱体型的几何多刚体模型作为上肢运动模型,将上肢视为3 个圆柱形节段B1、B2、B3,上肢关节简化为铰链结构。如图1所示。

图1 人体上肢几何多刚体模型Fig.1 Geometric multi-rigid body model of human upper limb
上肢关节中,肩关节能够实现内旋、外旋、外展、内收、前屈、后伸6 个动作,总共3 个自由度,从物理角度可视其为球铰链结构。肘关节能够实现前屈、后伸2 种动作,为1 个自由度;前臂可实现旋前、旋后2 种动作,为1 个自由度。腕关节能够实现展收、屈伸4 种动作,共2 个自由度。总体来看,上肢多刚体模型为具有7 个自由度的运动系统[13]。
由于本文模型的自由度个数大于末端刚体(手部)实现任意运动轨迹最少所需的6 自由度,故该上肢模型为自由度冗余系统。采用梯度投影方法[14]求解冗余自由度。
2.2 梯度投影方法

大系数。
2.3 关节力矩模型
各关节力矩标量设置如表1 所示,肩关节、肘关节和腕关节的关节力矩矢量见式(3)。

表1 关节力矩模型中各关节力矩标量的表达式Table 1 Expression of joint torque scalars in the joint torque model
2.4 简化肌肉力模型
简化肌肉力模型是指在上肢关节力矩模型的基础上,考虑的力学参数还包括肱二头肌力、三角肌前束肌肉力、三角肌外束肌肉力,分别实现肘关节的屈伸、肩关节的屈伸、肩关节的展收。
3 上肢典型动作仿真计算
3.1 运动学方法
运动学方法主要研究物体的运动规律,此时不过多考虑物体质量和惯性等物理性质以及物体的受力情况等[15]。本文在已知上肢推拉时的末端运动学参数情况下,反向求解各个关节的运动学参数,属于反向运动学计算。
3.2 动力学方法
3.2.1 关节力矩模型计算
动力学部分的仿真计算选用Kane 法[16-17]。在关节力矩模型中,广义主动力表达式如式(4)所示。

式中,τsw表示三角肌外束对上臂产生的力矩矢量,τsq表示三角肌前束对上臂产生的力矩矢量,τge表示肱二头肌对前臂产生的力矩矢量。
最终,简化肌肉力模型的Kane 方程见式(9)。
同样,依据偏(角)速度展开,可得n个方程(n为系统自由度)所组成的线性方程组,从而求解n个关节力矩和肌肉力的数值结果。
3.3 仿真平台及工况
利用MATLAB R2012a 实现上肢运动与动力学优化仿真算法后,进一步开发了如图2 所示的人机交互力学性能工效测评平台,并有如下建模条件:

图2 显控界面人机交互力学性能工效测评平台Fig.2 Human-computer interaction mechanical performance ergonomics evaluation platform of display and control interface
1)舱内作业为固定上肢舱内作业;
2)在重力条件下进行作业;
3)舱门处于关闭状态;
4)在作业过程中,不考虑失重对作业的影响。
3.3.1 上肢推拉动作仿真工况
上肢推拉动作常见于航天员开关空间站舱门。动作示意如图3 所示。

图3 上肢推拉舱门动作Fig.3 Upper limb pushing and pulling the hatch
上肢末端(手部)的运动轨迹如图4 所示,运动轨迹为1/4 圆弧,其运动设为匀速圆周运动,圆心(x0,y0),半径为r,运动时间t0=3 s。上肢末端所受舱门的拉力为F,上臂、前臂和手部分别用B1、B2、B3表示,长度分别为l1、l2、l3,肩关节至上臂质心、肘关节至前臂质心以及腕关节至手部质心距离分别为c1、c2、c3,各部分质量分别为m1、m2、m3,各自绕质心轴的转动惯量分别为J1、J2、J3。依据国标GB/T10000-1988《中国成年人人体尺寸》和相关尺寸间换算方法,以及本文上肢模型各节段的姿态特点,给出仿真中上肢各节段的尺寸参数和质量参数,如表2 所示。

表2 仿真实例中上肢模型物理参数设置Table 2 Physical parameters of upper limb model in simulation examples

图4 推拉动作中上肢尺寸及末端轨迹参数Fig.4 Upper limb size and terminal trajectory parameters in pushing and pulling action
设置3 种仿真工况,初始关节角度相同(均是上肢水平,肩关节内收10°),根据末端轨迹半径r不同进行仿真计算,通过设置不同舱门宽度进行人机交互性能的工效评价。上肢推拉动作计算分组见表3,其中,α1为肩关节的内外旋角度,β1为其外展内收角度,γ1为其前屈后伸角度;γ2为肘关节的前屈后伸角度;α3为腕关节的旋前旋后角度,β3为其外展内收角度,γ3为其前屈后伸角度。

表3 上肢推拉动作实例计算分组Table 3 Calculation grouping of upper limb pushing and pulling action examples
3.3.2 上肢点按动作仿真工况
上肢点按(或伸手触及)动作常见于触摸屏、按钮控制面板等操作。以竖直操控面板为例,对航天员伸手点按面板按钮的运动进行仿真。动作示意如图5 所示,z表示位于肩部上下的长度。

图5 上肢伸手点按按钮动作示意图Fig.5 Diagram of the upper limb reaching out and pressing the button
上肢点按动作实例计算分组如表4 所示,3种仿真工况初始关节角度相同,按钮所在位置的z方向距离不同。其中,条件2 在z方向的位置与肩部同高,条件1 和条件3 在z方向的位置分别高于和低于肩部15 cm。通过仿真,对不同高度的点按按钮设置进行分析。

表4 上肢点按动作实例计算分组Table 4 Calculate grouping of upper limb pressing action examples
4 结果与分析
4.1 上肢推拉动作仿真结果
在MATLAB R2012a 中编程实现数值仿真计算,求算出各关节角度与关节力矩在整个运动过程中的数值结果。关节角度与关节力矩的数值变化曲线如图6~8 所示。

图6 上肢推拉实例条件1(r=0.35 m)的仿真结果Fig.6 Simulation results of upper limb push and pull example of condition 1(r=0.35 m)

图7 上肢推拉实例条件2(r=0.45 m)的仿真结果Fig.7 Simulation results of upper limb push and pull example of condition 2(r=0.45 m)

图8 上肢推拉实例条件3(r =0.55 m)的仿真结果Fig.8 Simulation results of upper limb push and pull example of condition 3(r=0.55 m)
利用上述求算结果,进一步列出各个条件下的7 个关节角度的极值和7 个关节力矩的极值,具体数值见表5。

表5 上肢推拉动作不同条件下各参数极值一览表Table 5 List of extreme values of each parameter under different conditions in the upper limb push and pull
从关节运动角度来看: ①开舱门动作中,肩关节屈伸角度变化范围较小,3 个条件下均保持在约20°范围之内。肩关节水平展收角度从内收10°逐步运动至外展约90°~130°,运动跨度较大,但总体曲线保持基本平稳。②肘关节的屈伸角度从10°逐步增大,2 s 左右达到最大值约130°~150°,其后有所下降。需要指出的是,人体肘关节的最大屈伸角度为150°左右,因此肘关节运动角度会有达到极限的时刻,也就是说可能出现舒适度受影响的时刻。③腕关节旋动角度变化范围较小,且均远小于其角度极限范围。腕关节屈伸和展收角度的极值均达到接近关节运动极限的水平。但考虑腕关节离上肢运动末端距离过近且实际运动过于精细,故在针对运动学结果的分析中不以腕关节运动情况为主要考虑因素。
从关节力矩来看: ①开舱门运动中,肩关节的力矩变化范围及平均水平都是最大的,尤其是肩关节旋动力矩和屈伸力矩。这应该与肩关节远离运动末端,且其旋动力矩和屈伸力矩主要克服整个上肢的重力和转动惯量相关。②肘关节和腕关节的各关节力矩均保持在绝对值1 Nm 的较小范围内。③当末端受力较小时,除肩关节屈伸力矩外的其他力矩都较小,因此保持开舱门的流畅性以保证较小的末端受力是关键所在。
对比分析不同末端运动半径(即不同舱门宽度)条件下的关节角度和关节力矩变化曲线,可以看出: ①随着末端运动半径的增大,腕关节角度的变化范围随之增大,这是由于腕关节距离末端运动轨迹最近,因而对半径变化的响应最明显。②随着末端运动半径的增大,肘关节的最大屈伸角度也随之增大。当r=0.45 m 时,肘关节最大屈伸角度达到143.55°,接近于150°的肘关节屈伸极限;当r=0.55 m 的时候,肘关节的最大屈伸角度达到151.99°,已小范围超出肘关节的极限屈伸能力。这说明在该条件下,仅靠上肢运动完成开门动作已经开始变得困难,可能需要加入身体其他部位的调整配合。因此,为了实现开舱门动作的方便性,开门半径应避免超过0.55 m。考虑到设计的冗余量,舱门宽度应尽量避免超过0.6 m。③随着半径的增大,各关节的力矩变化情况都不明显。这也正好说明了在较小末端受力的情况下,舱门半径对力矩影响较小。
4.2 上肢点按动作仿真结果
上肢点按动作关节角度与关节力矩的数值变化曲线如图9~11 所示。

图9 上肢点按实例条件1(z =0.15 m)的仿真结果Fig.9 Simulation results of upper limb pressing example of condition 1(z=0.15 m)
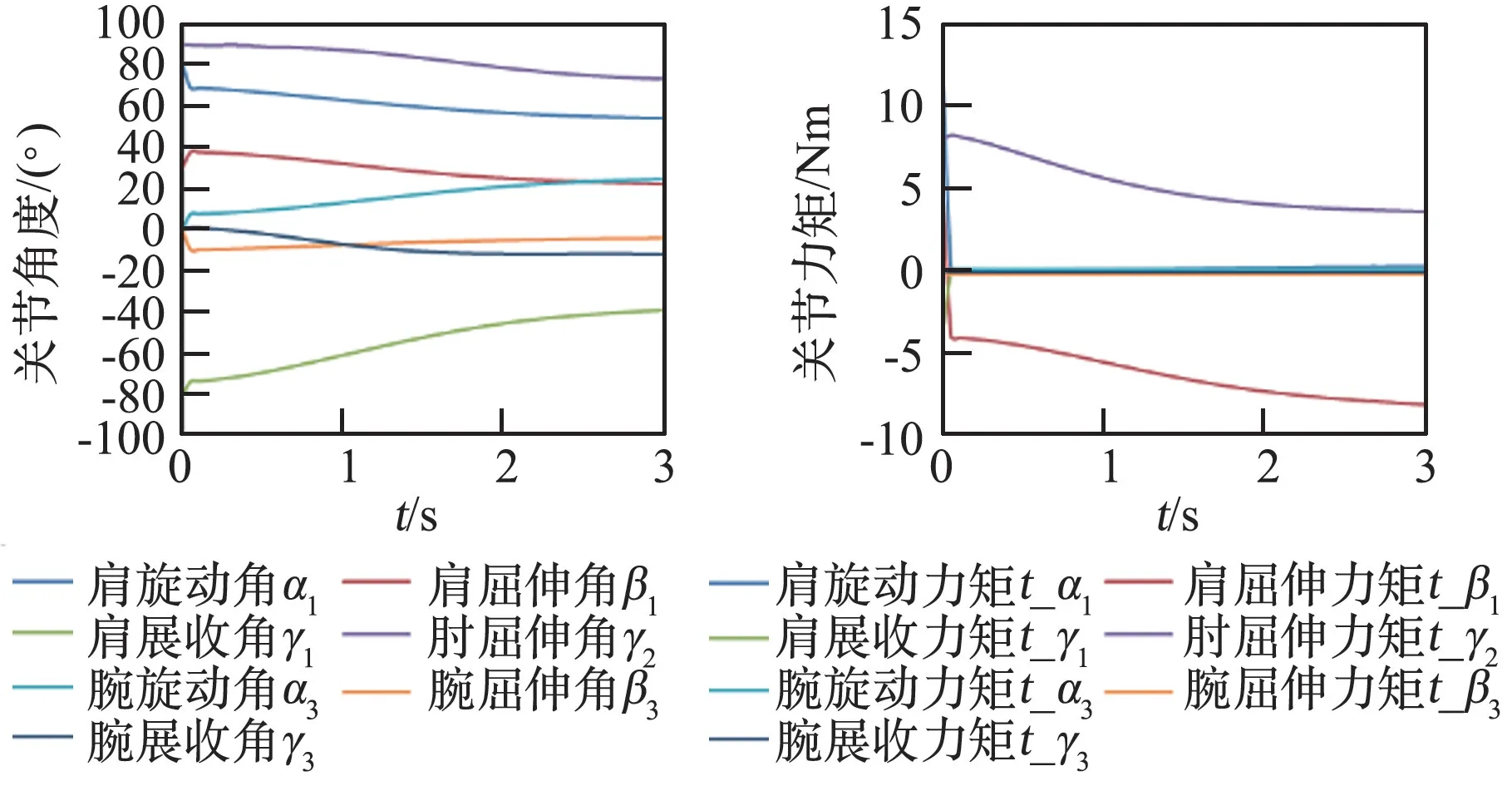
图10 上肢点按实例条件2(z=0 m)的仿真结果Fig.10 Simulation results of upper limb pressing example of condition 2(z =0 m)

图11 上肢点按实例条件3(z=-0.15 m)的仿真结果Fig.11 Simulation results of upper limb pressing example of condition 3 (z=-0.15 m)
利用上述求算结果,进一步列出各个条件下的7 个关节角度的极值和7 个关节力矩的极值、平均绝对值(用于衡量运动过程中的平均力矩大小),数值结果见表6。

表6 上肢点按动作不同条件下各参数极值、均值一览表Table 6 List of extreme values and mean values of each parameter under different conditions in the upper limb pressing
从关节运动角度来看: ①上肢伸手点按的动作中,肩关节内外旋角度和屈伸角度变化范围较小,除动作初期,3 个条件下均保持在约20°范围之内。肩关节水平展收角度变化较大,从外展80°逐步运动至外展30°左右,这主要与肘关节屈伸角度的逐步缩小有关。②肘关节的屈伸角度由90°逐步减小,变化平稳且远离关节极限。③腕关节在3 个条件下的旋动角度和屈伸角度变化范围十分接近,但其展收角度却表现出较大差异。上肢在伸手点按上方15 cm 处按钮时,其展收角度变化范围明显大于点按中部按钮和下方15 cm 处按钮,点按下方按钮时次之,点按中部按钮时最小。但考虑腕关节离上肢运动末端距离过近且实际运动过于精细,同时3 个条件下的腕关节展收角度范围仍然远离腕关节展收极限,故此不以3个条件下的腕关节展收作为主要的运动差异衡量依据。
从关节力矩来看: ①上肢伸手点按的运动中,肩关节屈伸力矩的变化范围和平均绝对值最大。这应该与肩关节远离运动末端,且其屈伸力矩主要克服整个上肢的重力相关。肩关节的旋动力矩和展收力矩都维持在较低水平。②肘关节的屈伸力矩同样保持在较高水平,仅次于肩关节的屈伸力矩。可见上肢进行伸手触及或点按动作时,肘关节屈伸同样起到了重要作用。③腕关节的各关节力矩均保持在绝对值1 Nm 的低水平范围内。④上肢伸手点按动作中,肩关节屈伸和肘关节屈伸在整个动作中起到了最主要的作用。
对比分析不同末端运动终点(即不同按钮高度)条件下的关节角度、关节力矩变化曲线以及关节力矩的平均绝对值,可以得出: ①随着点按按钮高度的减小,肩关节屈伸角度的变化范围逐步减小,肩关节的内外旋角度和展收角度变化范围无明显差异。同时,肘关节屈伸角度的变化范围逐步增大。腕关节旋动角度、屈伸角度和展收角度的变化范围均在按钮高度为0(按钮与肩同高)时最小,表明此按钮高度时所需的腕关节精细运动程度较小。但总的说来,不同按钮高度下的各关节运动角度均未出现接近关节运动极限的情况,整体运动都较为顺畅,因此还需结合关节力矩结果来进行优劣分析。②针对整个动作中起到最主要作用的肩关节屈伸力矩和肘关节屈伸力矩,对比不同按钮高度工况的结果来看,二者分别在按钮高度15 cm 和按钮高度-15 cm 时达到最大值。因此,综合考虑下,按钮高度为0(按钮与肩同高)时,上肢各关节综合负担相对最优。故针对竖直操控面板的按钮布局设计中,应避免将重要按钮或高频点按按钮布置在过于靠上或靠下的位置,以同时满足人体视野和上肢运动舒适性的要求。③与推拉动作仿真结果不同的是,上肢在进行伸手点按的动作中,肘关节的屈伸力矩维持在相对更高的水平,故在长时间、多频次的伸手触及和点按动作中,肱二头肌可能更容易出现疲劳。
5 结论
本文通过建立人体上肢多刚体模型和动力学关节力矩模型来研究航天员上肢典型动作力学问题,采用反向运动学和动力学Kane 法进行仿真推算,结论如下:
1)针对仿真模型的7 个自由度,采用梯度投影算法进行优化求解可以得到理想的结果,说明该方法对求解冗余自由度较为可行。人体上肢在人机交互过程中,影响上肢运动与关节力矩的主要参数有末端运动轨迹、末端受力、上肢初始位置等。
2)在固定上肢舱内作业时,为了实现开舱门动作的方便性,开门半径应避免超过0.6 m;在上肢可移动情况下,开门半径可以适当增大。按钮高度为0(按钮与肩同高)时,上肢各关节综合负担相对最优。
在今后的工作中,针对冗余自由度系统,需要采用更多的优化准则,来寻找更接近航天员实际运动策略的仿真算法。