基于Lucas-Kanade算法的目标跟踪研究
2023-12-25崔建红李银兵赵海茹李玉秀杨伟李国瑞
崔建红 李银兵 赵海茹 李玉秀 杨伟 李国瑞


摘要:在遮挡物较多的变电站场景下,传统的目标跟踪算法容易出现人员跟丢、身份变换、目标被遮挡无法识别等情况,无法做到对目标的准确实时跟踪。该文选择Lucas-Kanade算法,用以对视频中的移动目标进行检测与跟踪研究。在时间流运动目标轨迹不相同时,利用各帧图像上的运动目标轨迹偏差对算法进行评估,主要估算算法对运动目标的跟踪具体情况。实验结果表明,该算法能有效防止被跟踪点因被遮挡、隐没或纹理特性改变而引起的跟踪失败,实现对运动目标的准确、实时和稳定跟踪,从而为变电站在复杂环境中的运动目标检测与跟踪研究提供了参考。
关键词:目标跟踪;光流法;Lucas-Kanade算法
中图分类号:TP3 文献标识码:A
文章编号:1009-3044(2023)31-0025-03
開放科学(资源服务)标识码(OSID) :<G:\飞翔打包文件一\电脑2023年第三十一期打包文件\9.01xs202331\Image\image153.jpeg>
0 引言
随着智能电网的发展,无人值守或少人值守的变电站成为当今电力系统自动化和智能化的必然趋势,这也要求在变电站环境中开发出可靠的运动目标跟踪系统。由于传统的目标跟踪算法存在人员容易跟丢、身份变换、目标被遮挡而无法识别的情况,所以,针对基于变电站场景中的移动对象如人员、动物或车辆等,本文选择了Lucas-Kanade算法对其进行自动检测和跟踪。该算法能够在达到一定精确度的同时,减少人员在时间和精力上的消耗。部署自动化监控手段能够较好地解决目前变电站中潜在的安全隐患,可以快速、精确地识别是否有人员误闯和非法闯入的现象。同时,也使变电站的自动化程度得到了进一步提升。该方法能够有效地对变电站的复杂环境进行自动辨识,实现对变电站的实时预警,减少监测人员的工作负荷,从而为电网的安全提供充足的保障,确保电网的稳定运行。
1 光流法——Lucas-Kanade算法
1.1 光流法
光流的概念是指在连续的两帧图像中由于图像中的物体移动或者摄像头的移动导致的图像中目标像素的移动[1]。
传统的光流法是以固定的亮度为基础,也就是在被跟踪部分的像素移动之前和之后,其灰度都是相同的:
[I(x,y,t)=I(x+dx,y+dy,t+dt)] (1)
用Taylor公式进行展开,去掉相同的项,再把它们分别除以dt,就可以得出以下方程式:
[fxu+fy v+ft=0] (2)
[fx=∂f∂x;fy=∂f∂y] (3)
[u=dxdt];[v=dydt] (4)
以上的方程式被称为光流方程式,其中, fx, fy为图像的梯度,ft为方向的梯度。不过u、v是未知的,无法用一个方程解两个未知数,就以此引申出Lucas-Kanade算法。
1.2 稀疏光流——Lucas-Kanade算法
Lucas-Kanade算法是一种两帧差分的光流估计算法,由Lucas和Kanade两位科学家在1981年提出[2]。其基本思想基于以下三个假设:1) 亮度恒定;2) 时间持续性;3) 空间一致性。
1.2.1 算法原理
对照稀疏光流法的基本思想,其算法原理可以描述如下:
1) 基本光流法的假定之一是亮度恒定,即同一点在时间变化过程中,其亮度保持不变,这可用于得到光流法的基本方程。
2) 另一个重要假定是时间持续性,即当时间发生改变时,位置不会发生显著,变化,从而可以通过灰度值来求得位置的偏导数。换言之,只有在时间持续情况下,才可以使用前后帧之间单位位置变化引起的灰度变化来近似灰度对位置的偏导数,这也是光流法中必不可少的假设。
3) 空间的一致性,相邻的两个点在图像上的投影也是相邻的,并且相邻点的速度也是相等的,这是Lucas-Kanade光流方法所独有的一种假设。由于该方法仅有一个基本方程的限制条件,同时还存在两个不确定的变量。假设在特征点附近有类似的运动,则可以建立n个方程式来求取x、y方向上的速度(n是特征点附近的总点数,包含特征点)。
基于此,算法具有两个明显的优点:一是在不知道场景信息的情况下,能够精确地检测到运动对象的位置,并且即使摄像机在运动的情况下,这一特点仍然适用;二是它不仅承载着物体运动信息,还携带有关景物的丰富的三维结构信息[3]。因此,即使在不了解场景相关信息的情况下,也能迅速地监测到运动对象。
1.2.2 基本约束方程
照相机的图像会随着时间的推移而改变[4]。一个图像可以被视为一个时间的函数: I(t) 。因此,一种在 t时间点处的(x;y)上的像素,其灰度可被描述为 I (x、y、t) 。
根据上述假设条件得:
[I(x+dx,y+dy,t+dt)=I(x,y,t)] (5)
在左端做泰勒展开,只保留一阶项,由于本文假定灰度是恒定的,所以下一时刻的灰度与上一时刻的灰度相等,得:
[∂I∂xdx+∂I∂ydy+∂I∂t=0] (6)
[∂I∂xdxdt+∂I∂ydydt=-∂I∂t] (7)
这里的dx/dt是像素沿x轴移动的速度,dy/dt表示y轴的速度,用u和v表示。同时,∂I/∂x是在这点处x方向上的图像梯度,而另一项是y方向上的梯度,用Ix;Iy表示,写成矩阵形式,有:
[IxIyuv]=-[It] (8)
由于该方程有两个未知数,需要至少2个方程才能够解。因此,根据假设条件2和3,该方法假设在像素周围的一个像素为w的窗口中,与该像素具有一样的运动状态。基于此,可以构建如公式(9) 所示的方程:
[[IxIy] kuv=-Itk], k=1,...,[w2] (9)
A=[Ix,Iy1⋮Ix,Iyk],b=[It1⋮Itk] (10)
A[uv=-b] (11)
基于最小二乘求解,得到:
[uv*]=-[ATA-1ATb.] (12)
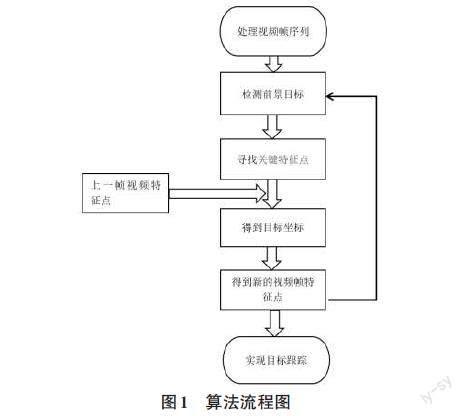
2 算法流程
Step1:用于处理连续的视频帧序列。
Step2:在每个视频的序列中,采用一定的对象检测算法,对潜在的前景目标进行检测。
Step3:如果某一帧有前景目标,则需要找到能代表该目标的关键特征点(可以是随机生成的,也可以用角点来替代特征点)。
Step4:对于后面任意两帧相邻视频,该算法首先将前一帧图像中的关键特征点与当前一帧图像相对应,然后找出该特征点在当前帧图像中的最优位置,从而得到前景目标在当前帧图像中的坐标。
如此这般重复,就能追踪到目标。
3 实验结果与分析
为了验证Lucas-Kanade算法的有效性与可行性,本文从网络上获取了在变电站复杂环境下的视频资料,并对其中的运动目标进行了跟踪实验①。
由图2和图3可以分析得出,Lucas-Kanade算法能对变电站环境中运动的目标进行跟踪与捕捉;由图4和图5可以分析得出,即使在有遮挡物遮挡的情况下,Lucas-Kanade算法仍然能对正在运动的目标进行实时跟踪。
可以看出,即使是在有遮挡物遮挡或在背景复杂的情况下,Lucas-Kanade算法仍然能够准确实时地对正在运动的目标进行检测与跟踪,体现了该算法对运动目标跟踪的有效性,为其以后能运用到变电站复杂环境中提供了可能性与可行性。该算法不仅能达到一定的精确度,而且在时间上的消耗较小,在一定程度上能应对在变电站复杂环境下对运动目标进行实时跟踪与检测的难题,能很好地解决在有遮挡物情况下人员容易跟丢的问题,从而提高变电站的自动识别水平,降低监测人员的工作负荷,保障电网安全稳定地运行。
4 结论
随着智能电网技术的不断发展,变电站环境中实现无人值守或少人值守的必要条件是运动目标跟踪系统研究[5]。因此,该项研究的发展变得尤为重要。本文给出了一种能对运动目标进行实时、准确且稳定跟踪的算法——Lucas-Kanade算法。该算法能对本文所研究视频中移动目标进行检测,并对其进行实时跟踪。实验结果证明,即使是在有遮挡物或在背景复杂的环境下,Lucas-Kanade算法仍能精确地检测和跟踪运动目标,达到了一定的精确度,而且在时间上开销较小,为其运用到变电站复杂环境中提供了可行性,能够较好地消除变电站中潜在的安全问题。这些技术不仅可以迅速准确地检测出在警戒区域内有无非法侵入或无意进入的现象,同时,也使变电站的自动化程度得到了进一步提升,使变电站发生故障时维修和维护更为及时。这将帮助变电站减少潜在的安全威胁,降低检测人员的工作负荷,从而保障电网的安全稳定运行。
注释:
①本文所研究的视频均来源于网络.
参考文献:
[1] 杨晶东,杨敬辉,蔡则苏.基于Kanade-Lucas的人眼跟踪算法研究[J].计算机应用研究,2010,27(4):1575-1577.
[2] 李明,王盛,孙更新,等.基于稀疏光流和密度聚类的运动目标检测算法[J].计算机仿真,2019,36(5):395-398,444.
[3] 肖军,朱世鹏,黄杭,等.基于光流法的运动目标检测与跟踪算法[J].东北大学学报(自然科学版),2016,37(6):770-774.
[4] 石龙伟,邓欣,王进,等.基于光流法和卡尔曼滤波的多目标跟踪[J].计算机应用,2017,37(S1):131-136.
[5] 顧波,刘新宇,张红涛.复杂环境下变电站运动目标跟踪技术研究[J].电测与仪表,2012,49(1):63-66.
【通联编辑:代影】