Resilient Event-Triggered Control of Connected Automated Vehicles Under Cyber Attacks
2023-12-22NingZhaoXudongZhaoNingXuandLiangZhang
Ning Zhao, Xudong Zhao, Ning Xu, and Liang Zhang
Dear Editor,
This letter contributes to designing a resilient event-triggered controller for connected automated vehicles under cyber attacks, including denial-of-service (DoS) and deception attacks.To characterize the effect of DoS attacks, the effective intervals of the attack are redivided based on the sampling period.Then, a resilient distributed event-triggering mechanism is proposed to compensate for the sabotage of DoS attacks and reduce the amount of transmitted data.Since the communication channel transmits the data only at the trigger instant, deception attacks may occur at this instant and be transmitted to each vehicle in superposition with the normal signal.Therefore, we construct stochastic models satisfying Bernoulli distribution to describe the false information injected by the attackers.Based on the above framework, an attack-resilient control strategy is proposed to resist the impact of cyber attacks.Then, sufficient conditions are established to achieve stability of vehicular platoons, and a co-design strategy regarding the control gain and triggering parameter matrices is given.Finally, the simulation results are provided to substantiate the effectiveness of the proposed method.
In recent decades, the widespread use of vehicles has put heavy pressure on transportation infrastructure, which in turn has led to a series of congestion problems and safety issues [1].Vehicular platoon control allows autonomous vehicles to travel at a relatively safe distance and speed, which can alleviate traffic pressure and improve the carrying capacity of vehicles on the road.Since this technology can solve the traffic problems faced by modern society, the stability and the tracking performance of vehicular platoons have achieved some remarkable results [2], [3].Guo and Yue [2] addressed sampled-based cooperative control issue of connected and automated vehicles with sensor failures.Reference [3] designed an adaptive sliding mode controller to solve platoon parametric uncertainties.
Communication between vehicles depends on network media,which makes it vulnerable to network channel congestion and cyber attacks.Since vehicle formations require large amounts of data transmission, traditional time-triggered mechanism can easily lead to network congestion.To achieve practical needs, a new trigger mechanism, namely the event-triggered mechanism, is proposed to deregulate the necessary data transmission.By designing a distributed adaptive event-triggered mechanism, an observer-based discrete-time controller was proposed to achieve all vehicles to maintain the desired asymptotic tracking performance [4].Two typical types of cyber attacks are DoS attacks and deception attacks.In order to resist the effects of these two attacks, some existing works have designed security controllers to maintain the desired distance between autonomous vehicles.In [5], a distributed cooperative secure platooning controller was designed to ensure the platoon stability and scalability requirements for connected automated vehicles in the presence of DoS attacks.Not limited to one attack mode, [6] addressed the eventtriggered security platoon control problem for second-order connected vehicle systems subject to DoS and deception attacks.However, few results solve attack-resilient sampled-data event-triggered platoon control problem.Its difficulty is that it fails to provide a unified framework for dividing the whole timeline by sampling period or attack intervals.To avoid this problem, the existing result [7]assumed that the attack start and end instants are integer multiples of the sampling period, which obviously limits the nature of the attack occurring at any one time.Solving this problem is the first research motivation of this letter.How to design control algorithms to save communication resources and resist the negative effects of multiple attacks is another research motivation.
Based on the above discussions, this letter studies the resilient event-triggered secure platoon control problem for connected automated vehicles under cyber attacks.The main contributions can be covered as: 1) Unlike the existing results [8] and [9], an attackresilient sampled-data event-triggering control strategy is designed to resist the impact of cyber attacks and reduce the network bandwidth pressure; 2) By employing the Lyapunov functional approach and the linear matrix inequality technique, the stability conditions of the platoon error system are given, and then the controller gain and the trigger parameter matrices are presented simultaneously.
Notation: For a given matrix P, P>0(≥0) and P <0(≤0) indicate that P is (semi-)positive definite and (semi-)negative definite.||·||denotes Euclidean norm for vectors.
Problem statement: ConsiderN+1 automated vehicles containing 1 leader marked 0 andNfollowers markedi.Letqi(t),vi(t) andai(t)denote the position, velocity and acceleration of vehiclei(∈ 〈N〉).The dynamics of each vehicle can be uniformly modeled as

The goal of this letter is to design a resilient event-triggered controller for connected automated vehicles under DoS and deception attackssuchthat the safe distancedi,jremainsbetweenvehiclesiandj, andall following vehiclesmaintain the same speedand accelerationwiththeleading vehicle, namely,pi(t)→p j(t)+di,j,vi(t)→v0(t), andai(t)→a0(t).

Since the vehicle-to-vehicle (V2V) communication relies on the open network, the data transmission is vulnerable to cyber attacks.A detection device based on the acknowledgment signal is used to associate event generator and controller to identify the occurrence of the valid DoS attacks.DoS attacks considered here are modeled in the following form:
Assumption 1: There exist scalars D1>0, D2>0, T1>0, and T2≥1, such that
In vehicle platoon, the vehicleisends its own status information to the neighbor vehicle via wireless V2V communication.This faces the problems of network bandwidth limitation and cyber attacks.To solve these two problems, inspired by [7], the resilient event-triggered mechanism is applied to mitigate the network bandwidth pressure and remove the adverse effects of the attacks.Given that the communication network can only transmit discrete signals, we assume that the sampling period ish.In the absence of DoS attacks,the event-triggering instants can be decided by

Conclusion: This letter has investigated the problem of resilient sampled-based event-triggering platoon control for automated vehicles under cyber attacks.By using a piecewise Lyapunov functional method, stability conditions for vehicular platoon systems have been formulated.Then, an efficient co-design scheme is presented regard-ing the controller gain and the event-triggering parameter matrices,which enables maintaining the desired distance and the common speed and acceleration between the vehicles.
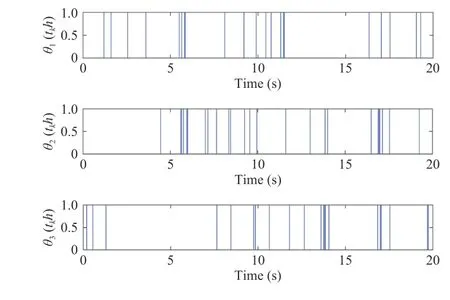
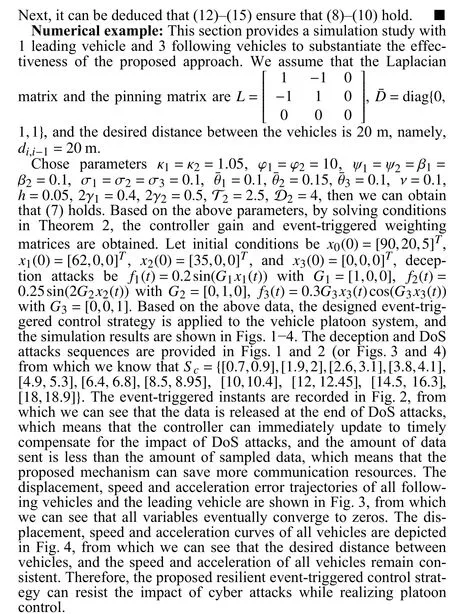
Fig.1.Instants of deception attacks.
Fig.2.The release instants.

Fig.3.Curves of system (6).
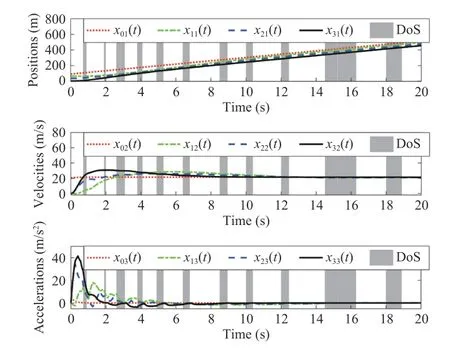
Fig.4.Curves of system (1).
Acknowledgments: This work was supported in part by the National Natural Science Foundation of China (62203064,62203065, 62303069) and the Open Fund of Institute of Ocean Research of Bohai University (BDHYYJY2023017).
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- A Game Theoretic Approach for a Minimal Secure Dominating Set
- Knowledge Transfer Learning via Dual Density Sampling for Resource-Limited Domain Adaptation
- Subspace Identification for Closed-Loop Systems With Unknown Deterministic Disturbances
- Magnetic Field-Based Reward Shaping for Goal-Conditioned Reinforcement Learning
- Multi-Blockchain Based Data Trading Markets With Novel Pricing Mechanisms
- GenAI4Sustainability: GPT and Its Potentials For Achieving UN’s Sustainable Development Goals