谷物收获机动态调平装置控制系统设计
2023-12-22谭丽云
谭丽云
(大安市农机管理总站,吉林 大安 131300)
0 引言
谷物是我国重要的粮食作物,在全国范围内种植面积较大,对于国家的粮食安全和农业发展具有重要意义[1]。由于我国谷物种植区域分布不集中,特别是在丘陵、山地等地区,特殊的地理环境会增加农业机械发生倾覆的风险,尤其是在坡度较大的山地或丘陵区域,农业机械在坡地上操作时容易失去平衡,导致倾覆事故的发生,不仅给农民的生产带来困扰,还可能对人员安全造成威胁,甚至导致人员伤亡,给农民带来经济损失[2-3]。
目前,大多数谷物收获机存在轮距较窄、质心较高等特点,当机器行驶或操作时,轮距较窄可能会导致机器在不平坦地面上失去平衡,而质心较高则会进一步削弱机器的稳定性,导致谷物收获机稳定性较差。传统的调平系统主要采用手动调平,调整支撑脚或调平杆的长度,进而改变机器的倾斜角度[4]。通过手动操作调平装置,可以使机器在不平坦地形上保持相对平衡,但是农民或操作人员需要不断观察和调整,确保机器保持稳定和平衡状态。
近年来,随着科技的进步和自动化技术的应用,一些谷物收获机开始采用自动调平系统。该系统通过使用传感器、液压或电动装置等,能够实时监测和调整机器的平衡状态,从而提高调平的准确性和效率[5-6]。自动调平系统可以根据实时地形信息和机器倾斜角度进行自动调整,减轻了操作人员的负担,提高了工作效率和安全性。
为了进一步提高谷物收获机的稳定性与智能化水平,本文采用液压系统和油气悬架系统实现谷物收获机调平装置的设计与优化,基于影响谷物收获机运行参数与油气悬架系统之间的关系,开发谷物收获机调平算法,进而构建调平系统。
1 谷物收获机调平结构概述
1.1 谷物收获机整体布局及工作原理
谷物收获机主要包括切割装置、脱粒装置、清选装置、输送装置和引导装置,谷物收获机的工作原理是通过切割、脱粒、清选和输送等系统的协调作用,实现对成熟谷物的收割、分离和处理。首先,切割系统将谷物茎部切割下来,然后脱粒系统将籽粒与秆、壳等分离后进入清选系统[7],接着清选系统对脱粒后的谷物进行清理和分选,去除杂质和不完整的籽粒。最后,输送系统将处理好的谷物输送到容器或储存设施中。通过动力系统提供动力,谷物收获机能够高效地完成收割和处理过程,各个系统相互配合,使谷物收获机能够在农田中准确行进、切割、分离、清理和输送谷物,实现自动化的谷物收获和处理,提高收割效率和作业质量。
1.2 油气悬架缸的设计与选型
为了提高收获机调平的快速和精准,以及缓冲车体受到外部激励载荷的影响,本文采用油气悬架液压缸连接车架与车桥,油气悬架液压缸是一种具有压缩气体和液压油共同工作的装置,可通过控制气压和液压油的流动来实现对车体的调平和缓冲作用[8]。结构如图1所示,当收获机遇到不平坦的地形或受到外部冲击时,油气悬架液压缸能够迅速响应并调整液压缸的工作状态,使车体保持水平和稳定。通过调节液压缸的压力、流量和阀门控制,可以实现对车体的快速调平和缓冲作用,提高收获机在复杂地形下的稳定性和可靠性。
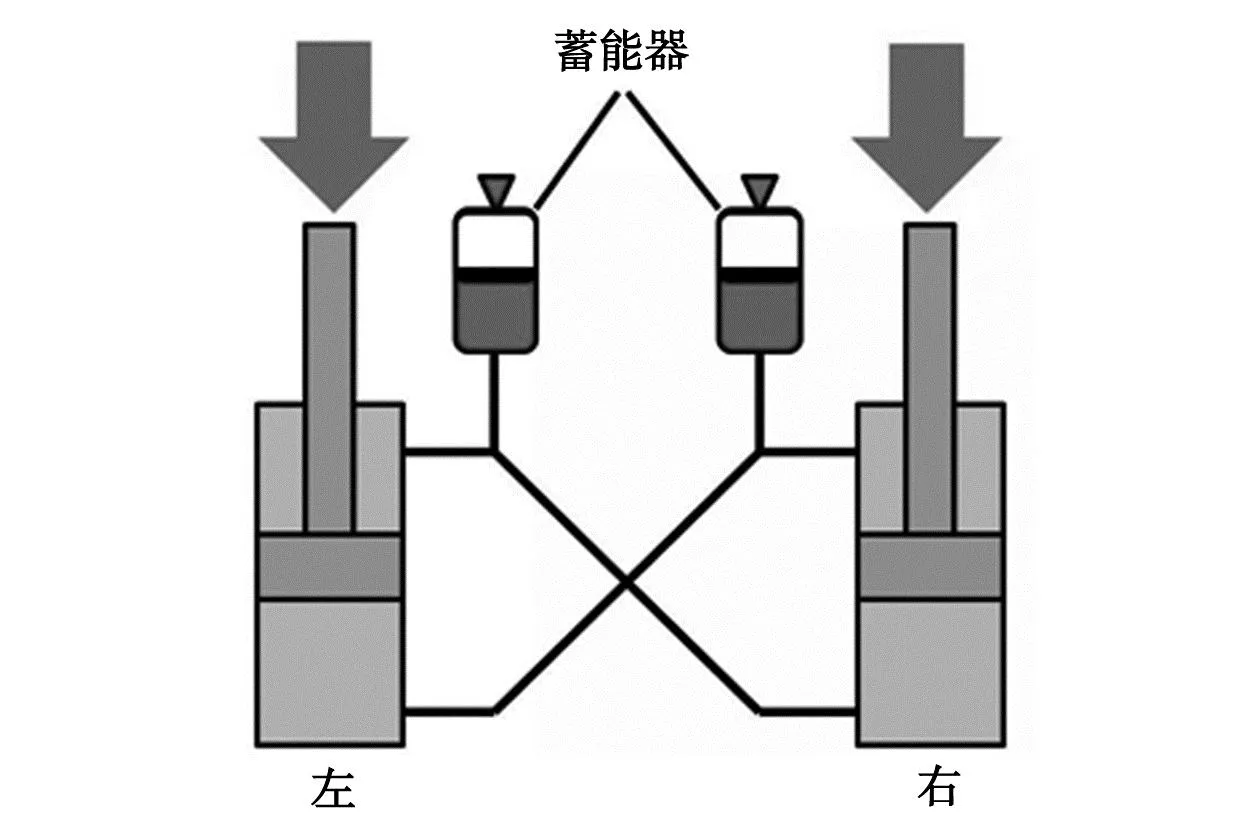
图1 油气悬架液压缸结构示意图
2 调平系统模型构建及调平控制策略
2.1 调平系统模型构建
本文将模型抽象为3个自由度的2弹簧-阻尼-质量元件1/4车体调平系统模型。该模型用于描述车体在调平过程中的动态行为,该模型包括以下组成部分。
1)车体质量元件。表示车体的质量,是模型中的一个质量元件,用来描述车体的惯性特性。
2)弹簧元件。模型中包含两个弹簧元件,分别代表车体在纵向和横向方向上的刚度,为调平系统提供弹性支撑,用于抵消外部冲击和不平坦地形对车体的影响。
3)阻尼元件。模型中也包含两个阻尼元件,用于模拟车体在调平过程中的阻尼效应。阻尼元件能够消散车体的动能,使车体在调平过程中更加稳定。
由于收获机具有几何尺寸和质量分布的中心轴对称性,左右两侧的运动基本相同,因此可以采用单个油气悬架缸系统来实现调平功能,能够快速、精准地调整车体的姿态,提高收获机在复杂地形下的稳定性和安全性。
2.2 调平控制策略
调平原理主要包括三点调平、四点调平和六点调平,这些方法用于保持机器的平衡和稳定,以适应不同的地形和工作条件。
1)三点调平。三点调平是一种常见的调平方法,通常用于具有三个支点的机器或车辆。其中两个支点位于前部或后部,另一个支点位于中间。通过调整支点的高度或位置,使机器保持平衡。该调平方法简单实用,适用于较为平坦的地形。
2)四点调平。四点调平是一种更高级的调平方法,常用于具有四个支点的机器或车辆,可以更精确地控制机器的姿态和平衡。通过调整四个支点的高度或位置,使机器在横向和纵向方向上保持平衡。四点调平可以提供更好的稳定性和适应性,适用于复杂地形和工作条件。
3)六点调平。六点调平是一种更高级、复杂的调平方法,通常用于大型机器或车辆。六点调平利用六个支点,分别位于机器的前部、后部和两侧,以更精确地控制机器的平衡和姿态。通过调整六个支点的高度或位置,可以在多个方向上实现平衡和稳定,使机器能够适应极端地形和工作条件。
3 调平控制系统的构建与分析
3.1 调平控制方法
本文采用比例-积分-微分(PID)控制方法,通过调整比例、积分和微分三个控制参数来实现系统的稳定。在调平系统中,PID控制可以根据测量到的车体倾斜角度,计算出相应的控制输出信号,用于调节油气悬架缸的工作状态,实现平衡。
3.2 电气控制系统
电气控制系统主要包括控制器和显示器的设计与选型,本文使用PLC,通过无触点电子存储器完成执行动作,在该系统中,PLC负责接收输入信号、执行逻辑运算和控制输出信号。无触点电子存储器是PLC内部的电子存储设备,用于存储程序、数据和中间结果。由于无触点电子存储器的特性,PLC可以实现高速、准确的逻辑运算和控制操作,操作员可以通过编程对系统进行灵活调整和修改,以满足不同工作要求和条件。其基本工作流程如图2所示[9]。
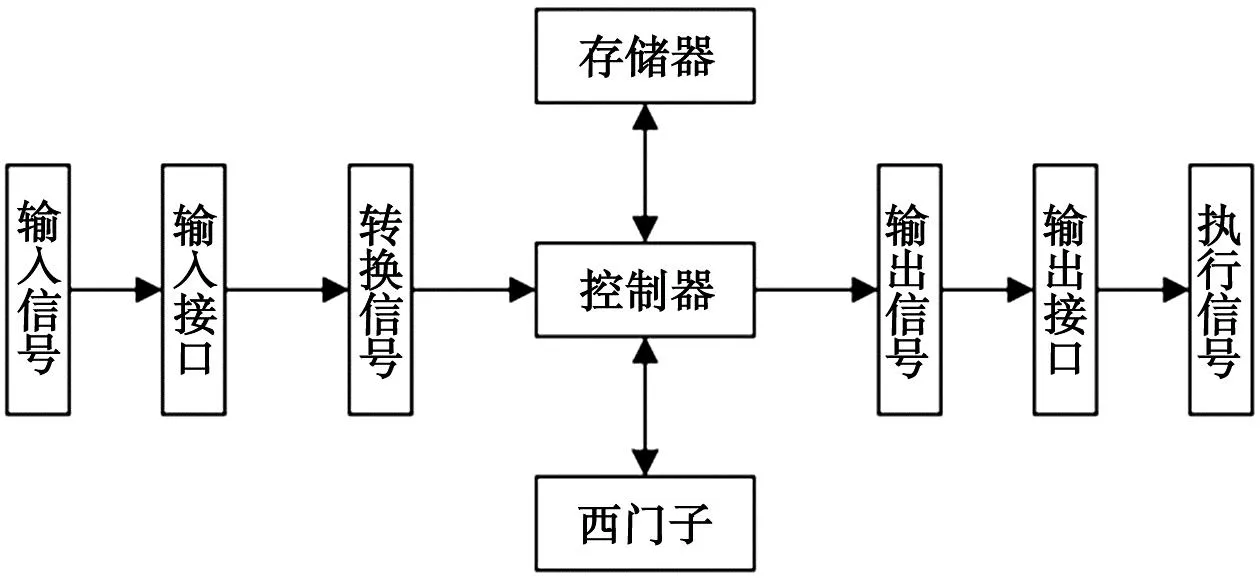
图2 控制流程图
显示屏选择Samsung QLED Q80A,具有1 920×1 200的分辨率和广阔的可视角度,具有较低的功耗,适用范围较广。
3.3 人机交互界面的设计
谷物收获机调平系统登陆界面的设计如图3所示,登陆界面的布局简洁明了,重点突出。使用合理的分区和对齐方式,使用户能够轻松理解界面的各个部分。对于涉及用户账户和密码的登陆界面,确保采取适当的安全措施,本文设置了密码加密和用户身份验证,以保护用户数据的安全性。
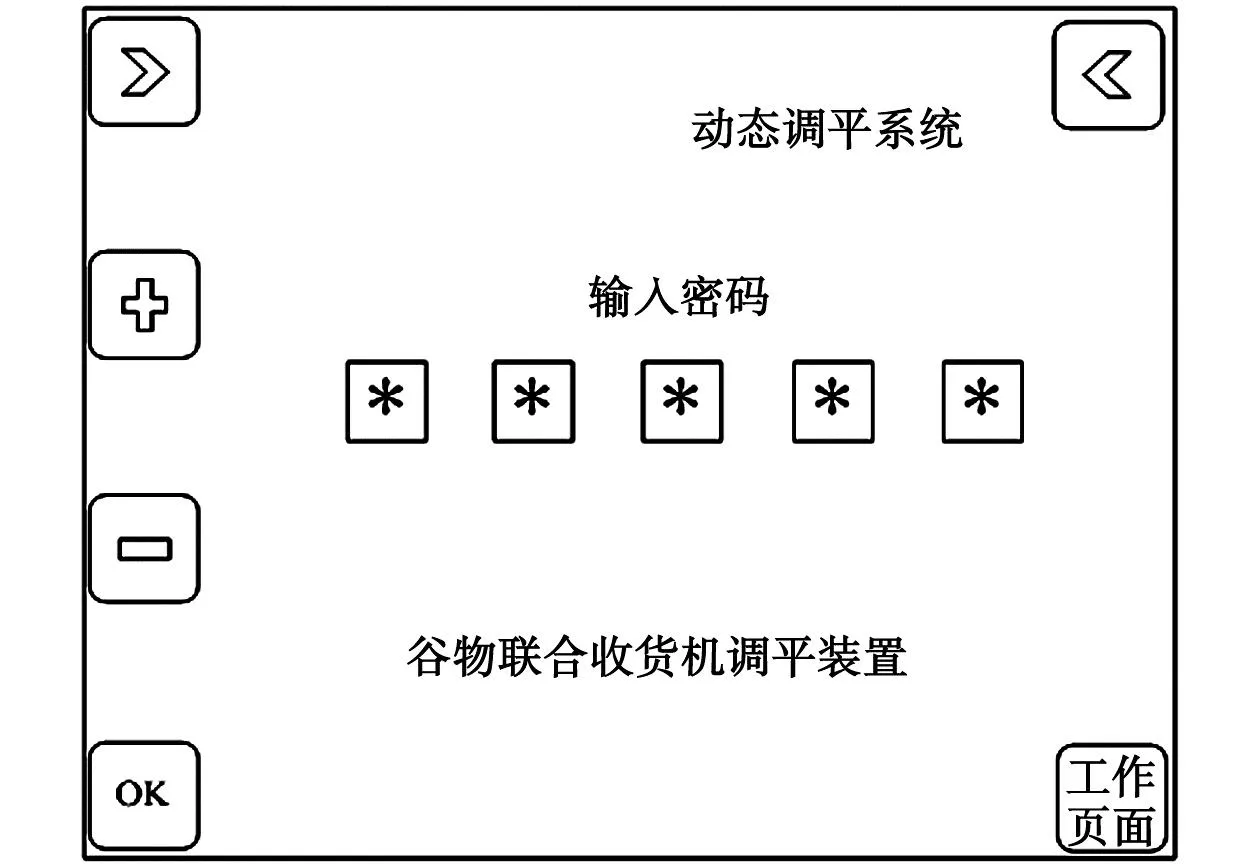
图3 登陆界面的设计
调平参数界面的设计如图4所示,本文使用文本框、滑块、下拉菜单等控件来接收和选择参数值,在用户输入或调整参数时,提供实时反馈和预览效果,帮助用户了解参数变化对系统的影响,确认按钮或操作可用于提交参数设置,并提供适当的提示和确认信息。
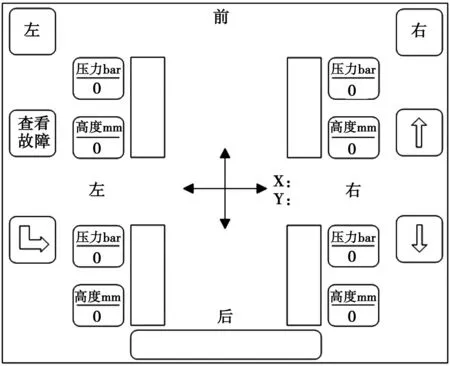
图4 调平参数界面的设计
4 结论与展望
4.1 结论
本文通过对谷物收获机调平系统的设计与优化进行研究,提出了一种基于油气悬架液压缸连接车架与车桥的调平系统方案。通过采用连通式油气悬架同步调平系统,结合双倾角传感器和角度传感器进行数据采集,构建了闭环控制系统,实现了谷物收获机的快速、精准调平,通过模型抽象为两弹簧-阻尼-质量元件的1/4车体调平系统模型,对调平系统进行分析和优化,为实际系统的设计和控制提供了指导。
4.2 展望
未来在调平系统设计中,可以加强对机械结构和连接件的强度分析和优化,确保系统在恶劣环境和重负荷工作条件下的可靠性。同时,注重安全性设计,加入预警机制和安全保护装置,降低事故发生的可能性,保护操作人员的安全。
