基于BN-DT下无人农场投资风险效益评估系统设计
2023-12-22王少营
王少营
(聊城职业技术学院,山东 聊城 252000)
0 引言
无人农场作为一种新兴的农业生产模式,利用先进的自动化和人工智能技术,实现农业生产过程的智能化和自动化[1-2],可以提高生产效率、优化资源利用、改善农产品质量。
在现代复杂多变的商业环境中,投资决策往往面临着诸多不确定性和风险性。特别是对于无人农场这样新兴的领域,投资者需要面对技术、市场、政策等多方面的挑战[3-4],而传统的评估方法可能无法全面考虑各种不确定性因素,导致决策的失误和风险的增加。
证据理论作为一种用于处理不确定性和不完全信息的数学工具,可以将不同类型的证据转化为信任度函数,并通过权重的分配和组合,得出最终的评估结果[5],对各项风险指标进行客观地分析和评价,从而做出更准确的投资决策[6]。
本文基于无人农场投资关键指标,根据相关数据或专家经验,建立对应的信任度函数,根据不同证据的权重和关联程度,将不同评估指标整合成一个综合的评估结果,进而得出合理的综合评估方案。通过文献调研与实际评估,本文构建无人农场相关数据库,如市场调研数据、技术参数、农产品需求预测等,通过实证分析和验证,期望该系统在实际应用中可以为无人农场投资领域的决策者提供有力的决策工具,促进农业产业的可持续发展和创新。
1 无人农场基本结构及运行模式分析
1.1 基本结构
无人农场,又被称为“智能农场”“智慧农场”或“数字农场”,是利用先进的信息技术、自动化设备和人工智能等技术手段,实现农业生产过程的智能化、自动化和数字化的农场模式[7-8],是现代农业发展的重要方向。
无人农场的主要目标是实现农业耕种管收全程无人化作业,核心技术为智能管理云平台[9],智能农机装备为技术支撑[10],进而实现无人农场的感知决策、精准作业、自动驾驶和多机协同作业[11](图1)。
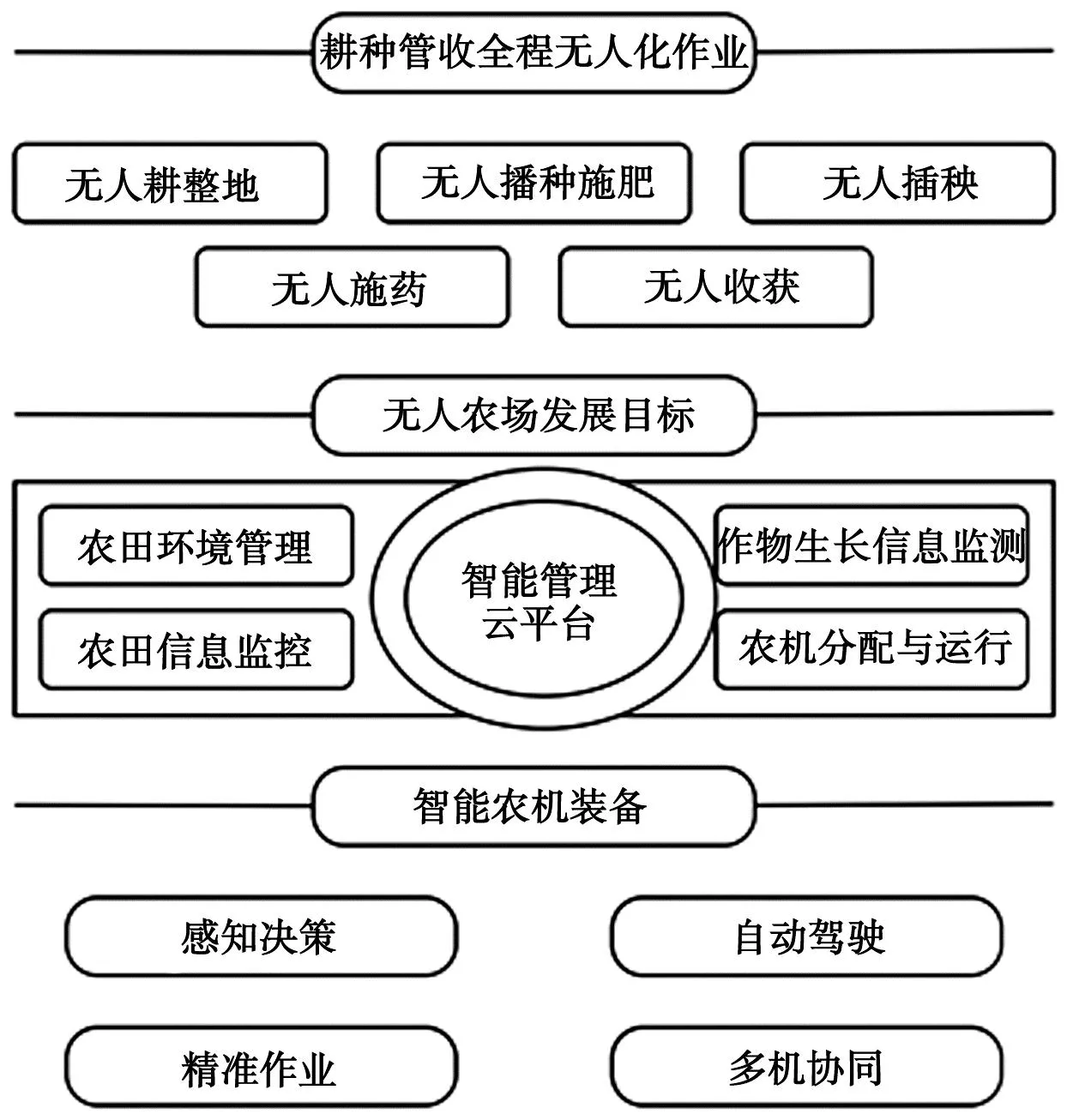
图1 无人农场系统结构示意图
1.2 关键技术及组成部分
1.2.1 信息感知系统
信息感知系统在无人农场中起着至关重要的作用,可以实时监测和感知农场的环境和农作物状况,为智能决策和精准作业提供必要的数据支持。信息感知系统主要包括无人机遥感装置、田间综合监测系统、物联网感知系统三部分。可通过搭载各种优越感器对农田进行高中高分辨率图像采集获取地理信息和农作物生长状况,进而制作高精度农田地图、监测农作物健康状态、检测病虫害等(图2),进行农业生产的实时监测和分析。并且,管理人员可远程监控和控制农机的作业,调整作业计划,并实时获取各项作业数据和农场运营情况[12]。
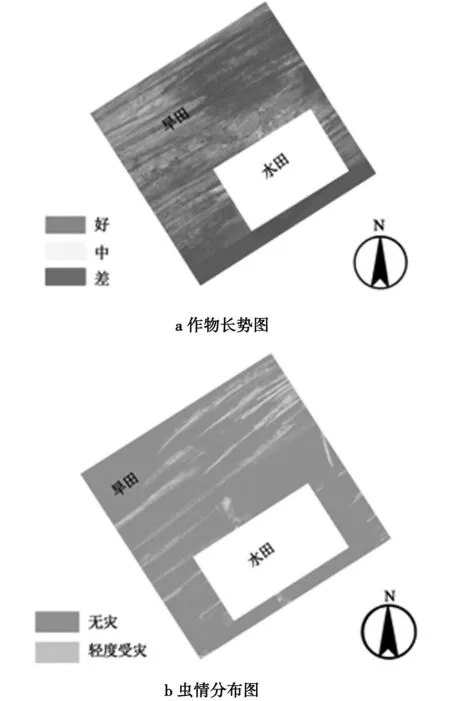
图2 无人农场作物长势及虫情分析图
1.2.2 智能农机装备
智能农机装备是无人农场的关键技术之一,通过集成先进的信息技术、自动化设备和传感器等,实现农业生产过程的智能化、自动化和高效化,主要包括自动驾驶拖拉机、智能播种机、智能喷洒器、自动化收割机、智能灌溉系统、无人机植保喷洒机、智能农业机器人等[13-14]。
2 无人农场投资风险效益评价方法及原理
2.1 贝叶斯网络
贝叶斯网络(Bayesian Network,BN)是一种通过有向图(Directed Graph)表示变量之间的条件依赖关系的概率图模型。有向图通常是一个有向无环图(DAG),因此贝叶斯网络也被称为有向无环图模型(Directed Acyclic Graph Model)[15]。
对于贝叶斯网络中任意随机变量X=(xt1,xt2,xt3,…,xtn),相应的联合概率分布可表示为
f(xt1,xt2,xt3,…,xtn)=∏∀tj∈tf(xtj|Xpa(tj))
(1)
式中,Xpa(tj)为随机变量X在时期tj的父节点集合;t为时期长度。
如果随机变量X为时间序列,且xtj的父节点为(xtj-1,…,xt1),则式(1)可转换为
f(xt1,xt2,…,xtn)=∏∀tj∈tf(xtj|xt1,xt2,…,xtj-1)
(2)
根据概率论中的链规则,即联合概率可以由其条件概率链表达,则式(2)右端的条件概率函数可构建为
(3)
2.2 证据理论
证据理论(Evidence Theory),也被称为Dempster-Shafer Theory(DST),用于处理涉及不确定性的推理、决策和数据融合问题。证据理论的核心概念是“证据”(evidence),用来表示对不同假设或事件的支持程度[16]。证据理论的基本要素包括:
1)证据集合(Mass Function)。它表示对不同事件的支持程度,是证据理论的核心。对于每个事件,都有一个相应的证据集合,它包含了在该事件上的支持程度信息。
2)证据组合规则(Combination Rule)。它可将不同证据集合进行合并,得到新的综合证据。证据组合规则考虑了不同证据之间的冲突和相互影响,从而得到更准确的综合结果。
3)置信度函数(Belief Function)和不确定性函数(Plausibility Function)。这两个函数是证据理论中的重要推理指标,置信度函数表示事件的可信程度,而不确定性函数表示事件的不确定程度。
3 基于证据理论下无人农场投资风险效益评估模型
本文提出一种基于证据理论下无人农场投资风险效益评估模型,评估流程主要包括评价指标体系及标准、贝叶斯网络构建和无人农场投资风险概率分析(图3)。
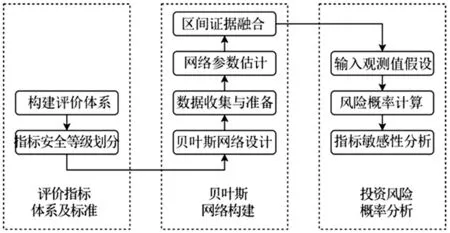
图3 无人农场投资风险效益评估流程
1)评价指标体系及标准的确定。首先确定无人农场投资的评价指标体系,涵盖投资风险和效益的关键方面,用于判断投资项目在该指标上的表现水平。
2)贝叶斯网络构建。在评估模型中,采用贝叶斯网络作为核心,构建投资风险效益模型。贝叶斯网络通过有向无环图表示不同指标之间的条件依赖关系。每个指标作为节点,通过专家知识或历史数据确定指标之间的条件概率分布。
3)无人农场投资风险概率分析。基于构建的贝叶斯网络模型,进行无人农场投资风险概率分析。通过输入不同的观测值或假设,对投资项目的风险进行概率计算。
3.1 评价指标体系及标准
无人农场投资风险是一个复杂、不确定的推理问题,涉及到众多因素。通过实地考察、文献调研,本章节提炼出无人农场投资风险的主要影响因素,主要包括无人农场技术装备A1、地理位置条件A2、农田面积A3、自然灾害A4。这些因素的复杂性和不确定性使得投资决策变得非常复杂,需要综合考虑各种因素的相互影响。本章节旨在构建证据理论的评估模型处理这些复杂因素,为决策者提供全面、准确的投资风险效益评估。
3.1.1 技术装备条件
投资无人农场需要大量智能农机装备和物联网感知系统等先进技术设备。技术装备的性能、稳定性和可靠性直接影响到农场的运营效率和产出质量。无人农场相关技术装备条件主要考虑智能农机装备数量(X1)、专业人才数量(X2)、农机维护与保养支持站点数量(X3)3个参数。
1)智能农机装备数量(X1)。过少的装备数量可能导致无法及时完成农业作业任务,影响农产品产量和质量;过多的装备则可能导致资源浪费,增加投资成本[17]。
2)专业人才数量(X2)。投资无人农场需要考虑所需的专业人才数量,包括技术人员、农业专家和管理人员等,确保技术装备的稳定运行和有效利用。
3)农机维护与保养支持站点数量(X3)。投资无人农场需要在农场周边建立维修站点或维护服务中心,保障装备的正常运行,降低由于故障带来的停机损失。
3.1.2 地理条件/位置
地理条件或位置是指无人农场所处的地理环境和位置特点,会直接影响到农场的运营和农业生产。主要影响因素包括水资源(X4)、降雨量(X5)、交通和运输(X6)、市场接近度(X7)。
1)水资源(X4)。水资源是农业生产中至关重要的因素,无人农场的水资源充足性和稳定性将直接影响到农作物的产量和质量。
2)降雨量(X5)。适量的降雨对农作物生长有益,但过少或过多的降雨都可能导致农作物的生长受到影响。
3)交通和运输(X6)。无人农场靠近主要交通枢纽和运输通道,农产品的流通和销售将更加便利,有利于降低物流成本和提高市场竞争力。
4)市场接近度(X7)。无人农场位于市场附近,农产品的销售和市场需求的响应将更加及时和便捷,这将有助于提高农产品的市场竞争力和销售收益。
3.1.3 农田面积
农田面积是无人农场的基本规模,直接关系到农产品的产量和经济效益。过小的农田面积可能导致规模经济效应不显著,难以实现投资回报,而过大的农田面积可能增加管理难度和生产风险。本文选择3种无人农场面积[18]。
1)小型无人农场(X8)。小型无人农场通常面积小于6.67 hm2,适合种植蔬菜、水果、花卉等特种作物或进行精细化管理的农业生产。
2)中型无人农场(X9)。中型无人农场的面积范围一般在6.67~66.67 hm2,适合种植大田作物如小麦、水稻、玉米等。中型无人农场可以更好地实现规模经济效应,提高农作物的产量和经济效益。
3)大型无人农场(X10)。大型无人农场的面积通常大于66.67 hm2,甚至超过666.67 hm2,适合进行大规模农作物种植或农业产业化经营。
3.1.4 自然灾害
自然灾害是指由自然因素引起的突发性、毁灭性的不可预测的自然事件,其严重程度可能对人类和环境造成严重影响。无人农场在面临自然灾害时也会面临一定的风险和挑战。本章节选取洪水(X11)、台风和飓风(X12)、冰雹(X13)及霜冻(X14)作为主要的自然灾害影响因素。
为了更好地对无人农场投资风险指标进行评价,需要对安全等级进行划分,本文设置低、较低、中等、较高、高5个风险等级,客观因素由实际数据进行衡量,主观因素的划分由相关领域专家进行百分之计算。
1)低风险(Risk Level 1)。在该等级下,无人农场的技术装备成熟稳定,地理位置条件优越,农田面积适宜,自然灾害风险较小,投资者对此类无人农场的投资风险相对可控。
2)较低风险(Risk Level 2)。此等级表示投资无人农场的风险较低,但略高于低风险等级。在此等级下,无人农场的技术装备较为成熟,地理位置条件良好,农田面积适中,自然灾害风险较小。投资者对于此类无人农场的投资风险可以通过一定的风险管理手段进行控制。
3)中等风险(Risk Level 3)。在该等级下,无人农场的技术装备可能存在一定程度的不稳定性或需要进一步改进,地理位置条件一般,农田面积适度,自然灾害风险较为普遍。投资者需要认真评估风险并采取适当措施降低风险。
4)较高风险(Risk Level 4)。无人农场的技术装备可能较为不成熟,地理位置条件相对一般,农田面积较大,自然灾害风险较高。投资者在决策时需谨慎考虑风险,可能需要更多的风险管理和预防措施。
5)高风险(Risk Level 5)。此时的等级表示投资无人农场的风险非常高。在该等级下,无人农场的技术装备不稳定,地理位置条件较差,农田面积过大,自然灾害风险严重。投资者对于此类无人农场的投资风险极高,可能需要谨慎评估或者选择避免投资。
3.2 模糊贝叶斯网络建立
本章节采用专家群决策法来获取根节点的模糊先验概率,通过多位专家的意见和知识,对问题进行综合评估,得出模糊先验概率。
将专家的语言评价值划分为5个风险等级(如3.1.4所示),量化x值分别为0.1,0.3,0.5,0.7和0.9。然后将评估表交给专家,要求他们对每个根节点的取值进行评估,并给出相应的模糊描述。专家可以使用模糊评估的方法,如模糊数或模糊语言描述,来表示他们的不确定性和主观判断。最后利用模糊隶属函数将专家的语言值评价转化为模糊区间值(表1),不同专家对于无人农场投资风险的评估结果有所差异,在一定程度上反映了不确定性和主观性。通过对模糊描述进行量化和平均化,得到了风险等级的平均值。

表1 专家对根节点的评估结果及模糊描述
专家评价结果模糊化之后,本章节选择高斯隶属函数反应其数值非线性正态分布特性,表达式如下
(4)
式中,x为专家评价对应的量化值;μ为函数的中心;σ为标准偏差,表示函数的均方根(RMS)宽度。本文5个风险等级高斯隶属函数分别为0,0.25,0.5,0.75和1。
基于证据理论的区间融合是一种用于处理不确定性信息的方法,它可以将不同来源的证据或信息进行合并,得到更为全面和准确的结论。在投资风险评估中,区间融合可以用于将不同专家或来源的模糊评估结果转化为区间估计,从而更好地反映不确定性和主观性。
根据经典证据理论,n个证据体之间的冲突程度以冲突系数K表示
K=∑Aj1∩Aj2∩…∩Ajn=φm1(Aj1)m2(Aj2)…mn(Ajn)
(5)
式中,Ajn(j=1,2,…,n)为第n个证据体的第j个焦元。
4 评估系统的设计
4.1 系统基本结构及工作原理
无人农场投资风险评估系统基本结构主要包括系统管理模块、专家打分模块、评估分析模块和用户管理模块,专家通过专家打分模块对投资风险效益进行评估,评估结果将传递到评估分析模块进行综合处理。评估分析模块使用基于证据理论和区间融合的方法,将专家评估结果转化为综合的评估结果。在这个过程中,系统会对数据进行适当验证和优化,确保评估结果的准确性和可靠性。用户管理模块则用于管理系统的用户和权限,保障系统的安全和稳定运行。
4.2 运行结果与分析
本文以本市ZS农田构建无人农场为例开展分析,针对ZS地区的农田,收集相关的技术装备信息、地理位置条件、农田面积、自然灾害等数据,并邀请相关领域的专家参与评估,以评估在这一投资项目中的风险与效益,系统运行结果如表2所示,根据贝叶斯网络和区间融合的方法,将以上专家评估值和数据分析整合,得出投资无人农场的综合评估结果为[0.4,0.7],说明该投资ZS农田构建无人农场为较低风险等级(Risk Level 2),但仍需要一定的风险管理措施来确保投资项目的成功与可持续发展。
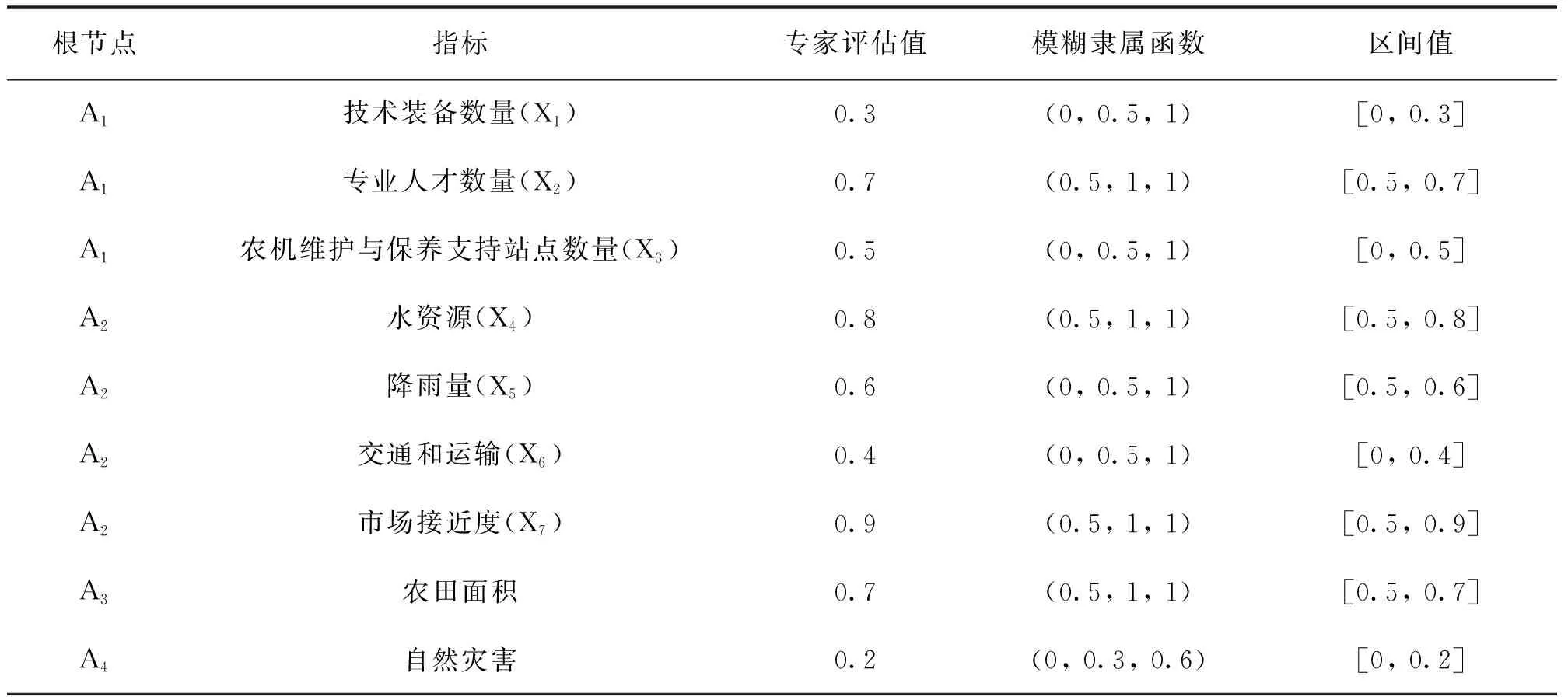
表2 ZS农田构建无人农场投资风险评估结果
5 结论
本文基于证据理论,设计了一种无人农场投资风险效益评估模型,并以某市ZS地区农田构建无人农场为例进行了分析,主要得出以下结论:
1)无人农场投资风险涉及到多个因素的综合影响。本文通过采用模糊评估和贝叶斯网络等方法,有效地处理了不确定性和不完全信息,更全面地考虑了各个因素对投资风险效益的影响。
2)本文选取无人农场技术装备(A1)、地理位置条件(A2)、农田面积(A3)和自然灾害(A4)做为影响因素建立基于证据理论的无人农场投资风险效益评估模型,通过模糊评估的方法,邀请相关领域的专家对各项指标进行模糊评估,评估结果被转化为模糊隶属函数,用于描述各个指标的评估值。
3)构建无人农场投资风险评估系统,通过收集相关数据和邀请专家参与评估得出,投资ZS地区农田构建无人农场的综合评估结果为[0.4, 0.7],表明该投资项目的风险效益在0.4~0.7,将投资风险划分为较低风险等级(Risk Level 2)。
