蠕虫形植物采样机器人设计
2023-12-22袁秣颇吕海霆
袁秣颇,李 晶,吕海霆
(大连科技学院 机械工程学院,辽宁 大连 116052)
0 引言
现今多数爬行机器人应用于社会环境,缺少在多变的野生环境中进行植物采集的能力和在较小空间以及斜面上探索的措施。大连海事大学衣正尧等[1]研制了一种永磁真空混合吸附式壁面除锈机器人,该机器人通过履带上的永磁体实现对船舶壁面的吸附,并根据爬壁高度的变化实现对负载管路质量及重心的自动调节。在中国,公开了一种重心可变式毛毛虫机器人专利,虽然该机器人设计上可通过皮带的转动调整中心,从而翻越障碍物,但该机器人缺少应对具有较大坡度障碍物的攀爬能力,以及质量不均匀的皮带更易磨损的缺点[2]。
在野生环境中难以发现体积较小和种群较小的植物,在采集植物过程中存在容易遗漏等问题。对于仅在特定时期可见的植物,如开花或结果时期,其存活时间非常短暂,观察植物的短期生长较为困难,采集时间难以把控,难以采集样本[3]。
为观察植物的成长周期,需进入动物领地或危险的地域中,这样不仅会让拍摄人员和研究人员的人身安全受到威胁,也会影响观察结果。针对上述问题设计蠕虫形植物采样机器人进行解决[4]。
1 整体结构
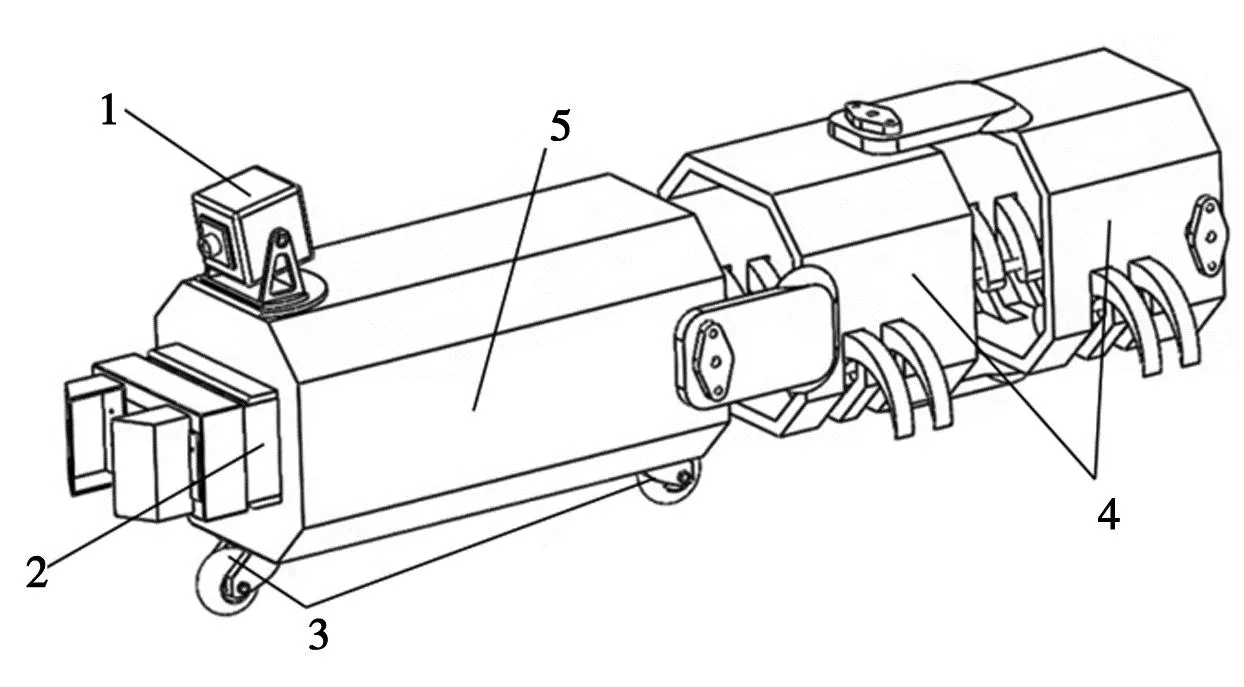
蠕虫形植物采样机器人,由驱动系统、采样系统、识别系统三部分组成(图1),以相连的各个容腔为基础结构,利用一对驱动履带和多对从动轮进行整体运动,舵机以不同方向安装于各个容腔内部,配合各部分结构完成转向、蠕动、位置固定和斜坡爬行的动作[5]。蠕虫形植物采样机器人设计过程技术路线图,如图2所示。
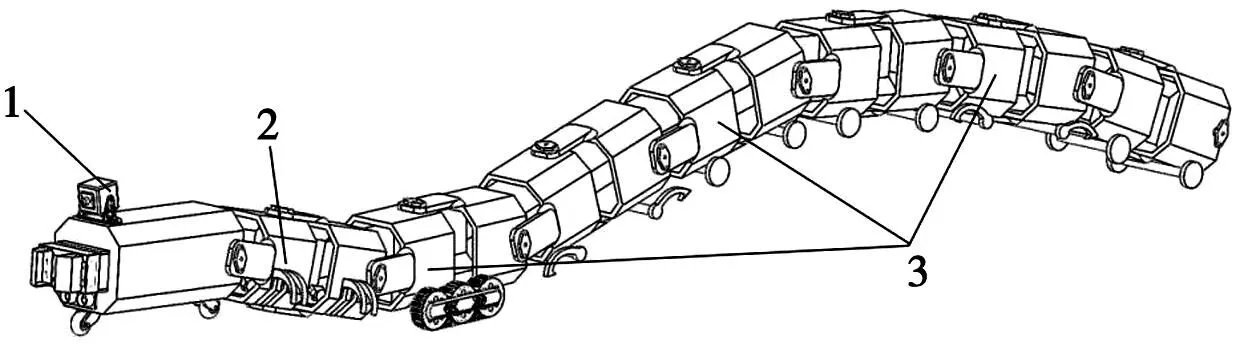
1.识别系统;2.采样系统;3.驱动系统图1 蠕虫形爬行机器人整体结构图
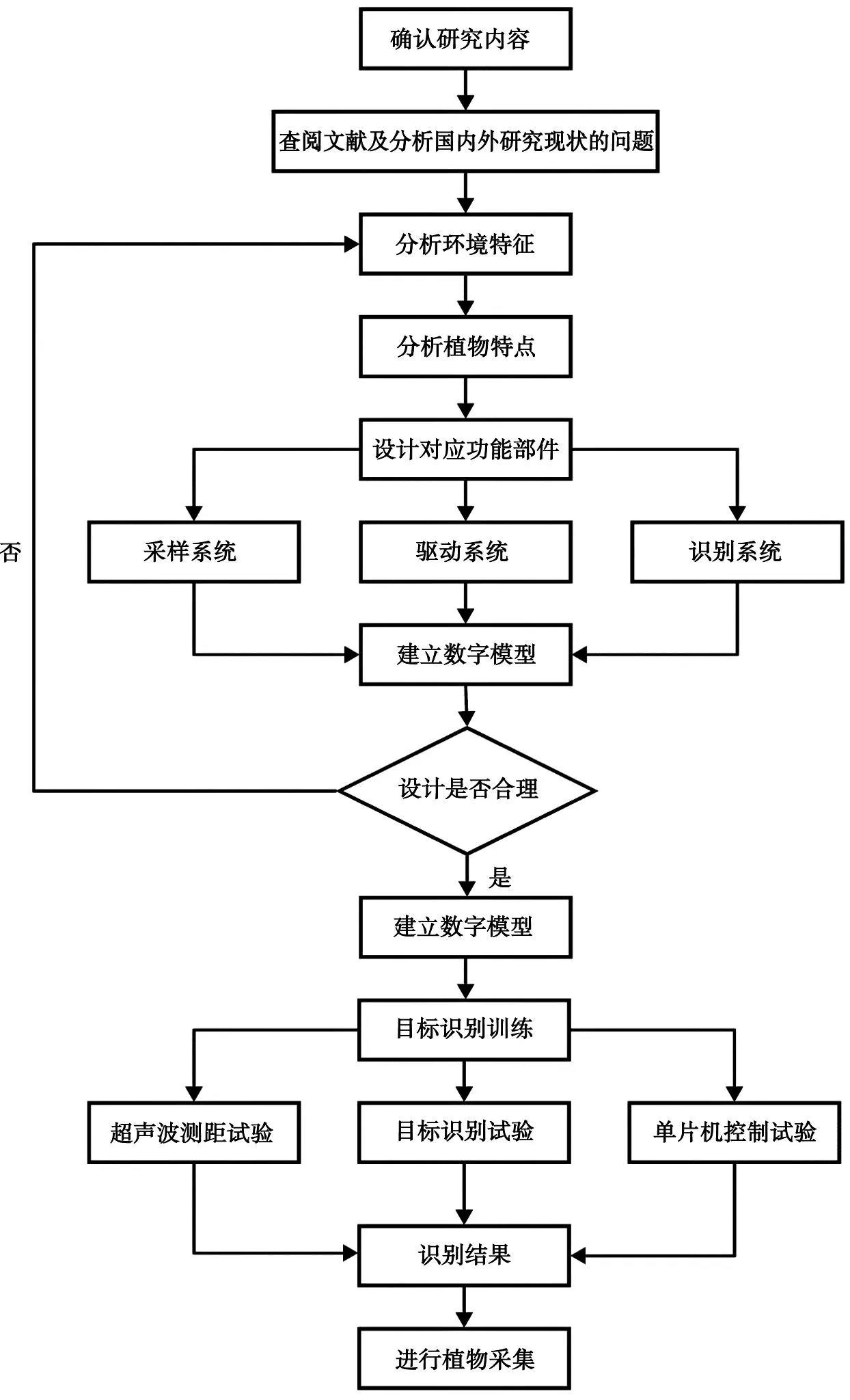
图2 蠕虫形爬行机器人技术路线图
2 结构设计方案
2.1 驱动系统
驱动系统包括驱动履带、转向装置、钩爪、从动轮。转向装置包括各节容腔、转动舵机、连接板、钩爪、从动轮。驱动履带位于驱动容腔下端两侧,通过驱动电机带动驱动轮,驱动轮带动机器人的整体运动。驱动电机电压范围为12~24 V,减速比为1∶48[6]。
2.1.1 驱动履带
驱动履带配合后方的从动轮带动蠕虫形植物采样机器人做前进及后退运动,如图3所示。在驱动容腔的下部剖开一个与驱动电机外形相配合的孔洞,驱动电机马达端从第四节容腔底部伸出,马达端两侧分别安装驱动履带的驱动轮,驱动电机将足够的动力传输到下方的驱动轮上。驱动轮带动履带及后方负重轮进行转动,驱动轮通过连杠与两个负重轮相互固定,使驱动轮和负重轮在同一水平线上。凹凸的履带表面在保证抓地力的同时,还能保证机器人应对不同地形和斜面倾斜度的爬行。
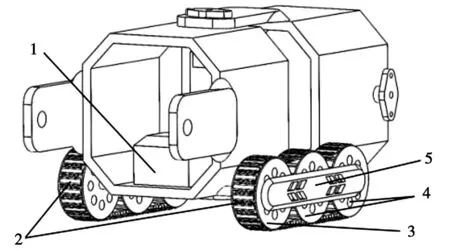
1.驱动电机;2.履带;3.驱动轮;4.负重轮;5.连杠图3 驱动履带内部结构示意图
2.1.2 转向装置
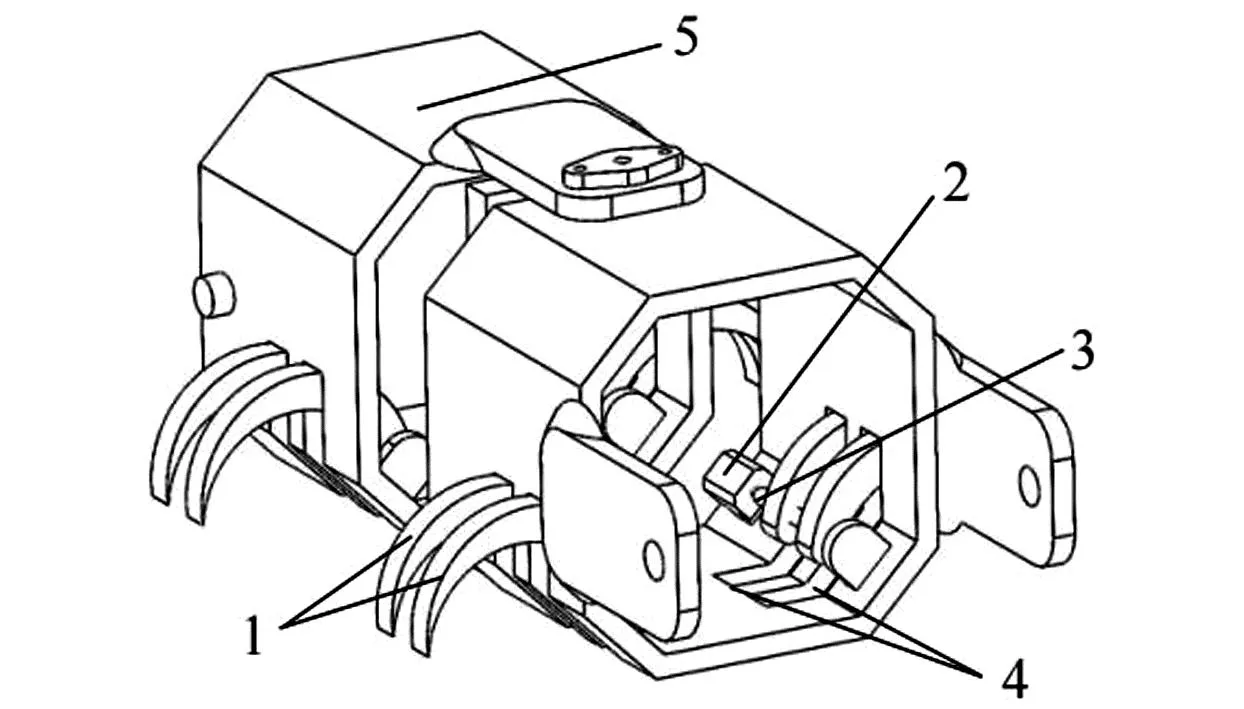
以每个容腔为单位进行运动,其内部装有独立的舵机。连接板与容腔两侧的凸台和预留孔伸出的舵机相连,将容腔分为横向连接板和纵向连接板两种形式,横向连接板连接的容腔拥有纵向自由度,可越过较高的凸起地形,以及爬过较浅的小型坑洞。纵向连接板连接的容腔拥有横向自由度,可通过多台舵机配合,完成转向、前进的方位调整[7],转向装置连接板容腔结构示意,如图4所示。
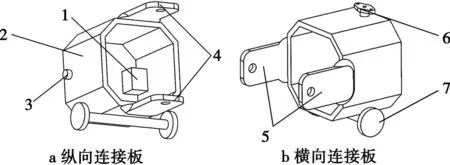
1.舵机;2.容腔;3.凸台;4.纵向连接板;5.横向连接板;6.预留孔;7.从动轮图4 转向装置连接板容腔结构示意图
在蠕虫形植物采样机器人整体运动时,多台舵机同时协作,在保证蠕虫形植物采样机器人协调前进的同时,也可固定舵机旋转位置,可将驱动轮连接的驱动电机电流反转进行后退。在需要调整前进方向时,舵机按照从前到后的顺序依次微调方向,在掉头和进行大幅度转向时需要在较大空间内进行,以完成大幅度转向过程中对大体积物体的避障和位置调整动作。
2.1.3 钩爪结构
由两个带有倒钩的弧形钩,通过拉杆平行连接组成单个钩爪,钩爪对称安装于两个相邻的容腔底部组成钩爪对(图5)。为了保证固定时蠕虫形植物采样机器人整体的稳定性,钩爪对安装于蠕虫形植物采样机器人的中间和末尾部分。在到达指定位置时,两个钩爪对进行抓合,将蠕虫形植物采样机器人固定于当前位置,不受其他环境因素的影响。在定点拍摄时,蠕虫形植物采样机器人根据地形变为适当的形状,两个钩爪对同时抓牢地面,利用中间部分、末尾部分底部的钩爪结构交替抓牢斜面,以此进行斜面上的攀爬,从而对目标进行定点拍摄[8]。
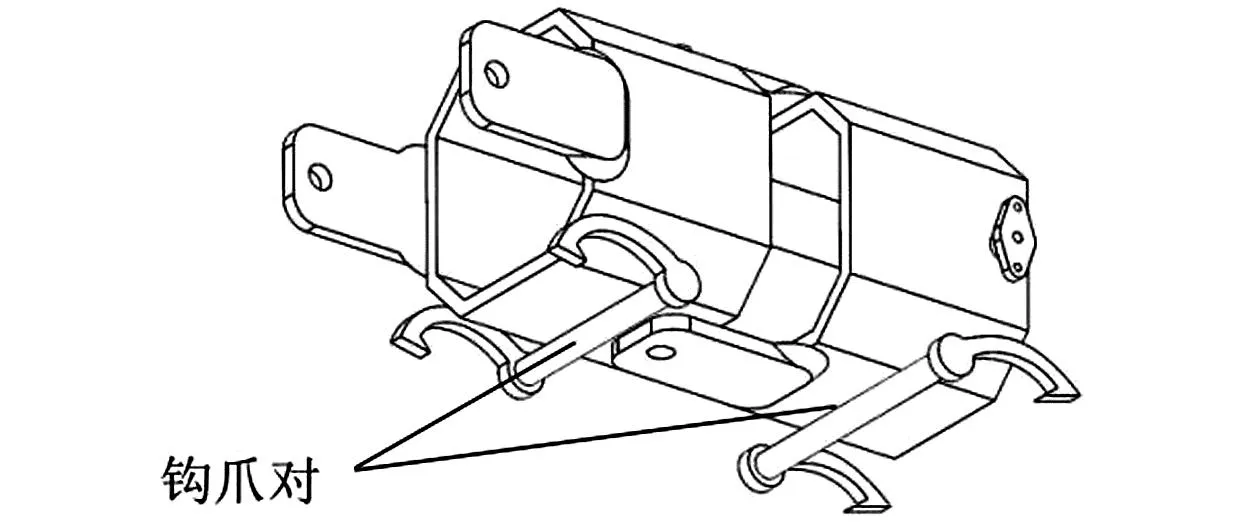
图5 钩爪对结构图
在斜面拍摄时,钩爪对和转向装置容腔内部的舵机相互配合,先由中间部分的钩爪对进行抓合,再由中间部分容腔的舵机转动,沿纵向自由度慢慢抬起,紧接着末尾部分的钩爪对进行抓合,中间部分的钩爪对慢慢张开,同时驱动电机传动至驱动轮,蠕虫形植物采样机器人向前运动。重复此爬行运动,完成对斜面的攀爬直至到达指定位置。
2.2 采样系统
采样系统包括微型相机、采集装置、万向轮和固定装置,结构如图6所示。
1.微型相机;2.采集装置;3.万向轮;4.固定装置;5.采集容腔图6 采样系统图
2.2.1 微型相机
微型相机位于采集容腔前端的上部,通过蓝牙与设备进行无线连接,实现实时监控、拍摄、录像的功能,便于操作机器人对采集目标识别和观测[9]。微型相机选择36 mm×36 mm×34 mm尺寸的类长方形,其配备的电池能支持约90 min的持续拍摄,还可进行定时长时间拍摄。微型相机录制的视频和拍摄图片都具有较高清晰度,通过蓝牙将微型相机与智能手机相连,对相机实施远程遥控,调整微型相机的拍摄角度。微型相机既能将照片和视频录入内置储存卡中查看,也能通过手机浏览。微型相机拍摄下来的画面及视频,具有连拍和缩时拍摄的特点。微型相机内部组件还有防水、防摔、防抖效果,通过加装保护壳还可以防震[10]。
2.2.2 采集装置
采集装置包括电动夹爪、电动推杆、切装头和底座(图7)。底座安装于采集容腔内部末端,与电动推杆相连,通过与容腔内部相连起到固定电动推杆的作用。电动推杆控制电动夹爪的伸缩,电压12 V,行程30 mm,推力60 N,速度15 mm/s。电动夹爪与切装头配合安装,电动推杆配合切装头进行闭合和张开等不同幅度的动作,滑台最大行程5 mm,最大夹持力110 N,最高速度60 mm/s,电压24 V[11]。切装头前边和下边为刀刃,通过闭合的方式剪切和装取植物。万向轮安装于第一节容腔的前端底部和后端底部,起到支撑作用和从动作用。

1.切装头;2.电动夹爪;3.电动推杆;4.底座图7 采集装置示意图
一对切装头安装于电动夹爪的两个滑台上,电动夹爪末端与电动推杆前端紧密相连,电动推杆末端固定于底座中间位置,底座固定于采集容腔末端起到稳定作用。通过采集容腔平台对电动夹爪的承载,辅助采集装置进行伸缩位置调整。
为方便采集生长方向不同的植物,切装头的前边和下边均为刀刃,通过调整机器人整体结构和采样装置的位置,将采集植物的部分调整至切装头内部,通过闭合的方式剪切植物,采集植物部分通常远大于剪切部分,故闭合的方式同样可以达到装取采集植物的作用。当切装头完成采样闭合时,其内部最大体积为3.3×105mm3,尾部容腔内安有柔性收集袋,完成采样动作后,各节舵机旋转,采集容腔向尾部运动,采集装置将切装头内部的采集样本放入最尾部的柔性收集袋中。
2.2.3 固定装置
固定装置包括固定容腔、固定爪、转杆、转动舵机等(图8)。固定容腔内部安装两对左右对称的固定爪,转杆和固定爪为一体,通过转杆的旋转角度来控制固定爪的旋转角度和力度。转动舵机用于带动转杆进行不同角度的旋转。
1.固定爪;2.转动舵机;3.转杆;4.夹合孔;5.固定容腔图8 固定装置示意图
固定容腔共有两节并相互连接,两节固定容腔连接于第一节容腔后方,固定容腔底部两侧对称开了4个夹合孔,两根转杆对称安装于固定容腔内部的夹合孔上方。待蠕虫形植物采样机器人到达指定位置时,固定装置开始运转,控制转动舵机带动转杆进行旋转,直至固定爪抓紧下方物体,稳定机器人的采集容腔和固定容腔,便于进行采样作业。
2.3 识别系统
2.3.1 超声波测距系统
超声波测距系统主要由微控制器STM32F103ZET6和超声波传感器HC-SR04组成。当超声波传感器探测到障碍物时,它将检测到的距离值发送给单片机。单片机处理距离值后,向驱动轮发送控制指令,以控制机器人是继续前进还是停止。该设计不仅解决了超声波传感器在实际场景中的抗干扰问题,还实现了避障效果。
超声波传感器工作频率在40 kHz,遥控距离约100 mm,将超声波传感器嵌入外壳内使用时,在传感器周围用橡胶或海绵等不影响传感器振动的弹性材料覆盖。选择会随温度变化而发生刚性变化较少的材料,确保传感器的振动不会传递到基板或外壳上[12]。
2.3.2 目标识别
基于卷积神经网络深度学习的YOLO模型,用于快速自动识别植物图像。该模型采用了端到端的目标识别方法,并引入了可变形卷积来适应目标轮廓。与传统基于候选区域的方法相比[13],YOLO模型无需提取候选区域,从而大大提高了目标识别速度。基于深度学习的植物图像识别算法,通过引入可变形卷积和优化模型设计,提高了植物图像识别的准确性和效率。这对于植物和种子分类等领域具有重要应用价值,此方法可提升植物识别的自动化程度[14]。
通过卷积神经网络结合YOLOv7算法,采用微型相机对采样植物进行目标识别。在本研究中,使用320张包含目标植物图像的数据集进行模型的训练和测试。通过评估模型在测试集上的性能,基于卷积神经网络深度学习的YOLO模型在目标植物图像识别方面表现出良好的准确性和效率,平均识别时间为2.6 s,平均准确率达到88.2%。此外,还对识别结果进行了可视化展示,验证了模型的有效性。拍摄320张图片,其中110张用于训练、110张用于测试、100张用于验证。再通过LabelImg软件,进行图片的标签制作,然后对结果进行分类选取,设置候选框,提高识别精度[15]。该过程具有高效性和精确性,微型相机可进行横向、纵向270°旋转,使得机器人能够通过扫描周围环境,自动识别并找到目标植物,无需人为干预。同时,还可以通过继续深度学习,自动识别出植物的特征,从而快速找到目标植物训练结果及识别结果,如图9、图10所示。
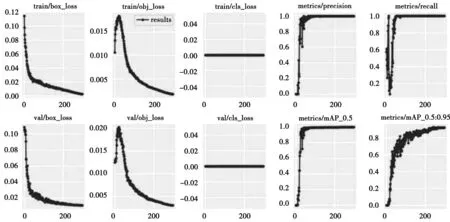
图9 训练结果
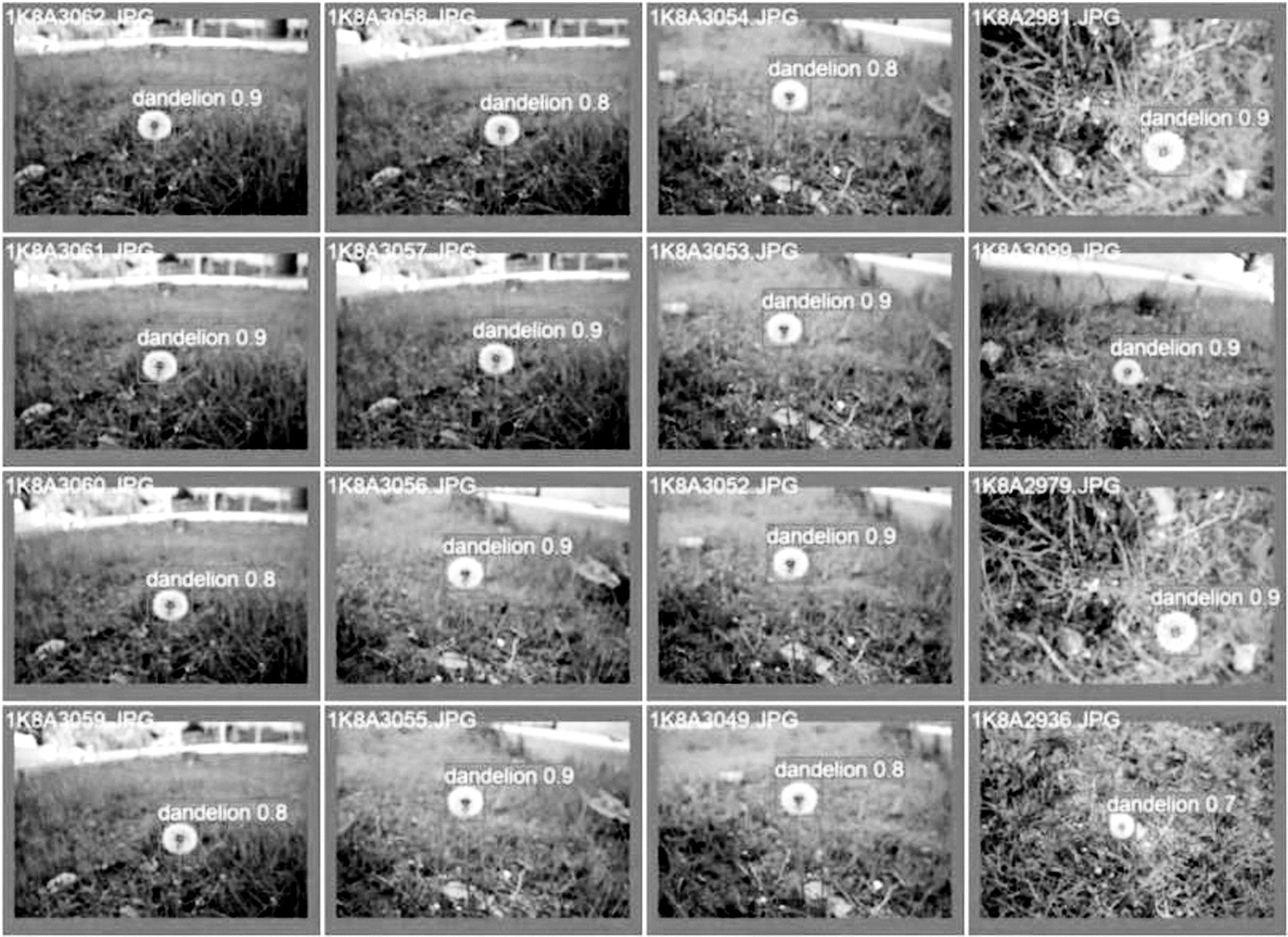
图10 多张识别结果
3 结语
针对人类在自然环境中采样植物活动受限,以及安全性较低的问题,设计了一款蠕虫形植物采样机器人,其体型多变,各个横向、竖向连接容腔内部的舵机可进行0°~45°的摆动,实现从水平面到斜面的爬坡,在小型洞穴及陡峭斜坡环境中进行转向、避障、倒行等运动。利用深度学习卷积神经网络YOLOv7进行模型的训练和目标识别,实现准确识别和采样。在识别中,固定爪使机器人的采集结构更加稳定,电动夹爪和切装头的共同运动,实现了对植物的切割和样品的储存。蠕虫形植物采样机器人操作方便、效率高、性能稳定,未来可实现多场景应用。
