花椒采摘机设计
2023-12-22蒋瑞奇万志远
蒋瑞奇,万志远,王 威
(山东华宇工学院 信息工程学院,山东 德州 253034)
0 引言
花椒不仅是香料、油料,还是一种重要的药物,其果皮、种子、枝、叶等均可入药。花椒性辛温,能使汗腺通畅,促进唾液分泌,有助于消化和杀菌,起到开胃健脾的作用,是中药里不可缺少的药引。但花椒果实较小,其树枝弯曲、伸展长还带有刺[1]。现阶段,国内大多数花椒采摘还停留在人工阶段,有极少数花椒采摘机也是在人工辅助下完成采摘,人工需求量大,导致成熟花椒的市场价格昂贵[2]。国外以机械振动的方式采摘花椒居多,如使用大型机械将树枝基部夹住,机械臂带动树身振动,通过共振将椒穗从椒树上振落下来,以便收集[3]。还有采用负压虹吸法,利用吸管对准成熟果枝,大型动力机械产生强负压气流将果实吸入储果箱中。国内陕西韩城市花椒研究所第一次研制的新型花椒采摘机,投入使用时,效果显著,后又相继出现手枪式锯齿形手动花椒采摘机、长臂剪刀式采摘机、负压吸收式采摘机等[4],但由于没能完全脱离人工,采摘时花椒树身伤害较重,没能实现量产。
为提高花椒采收效率和质量,现设计一种可有效代替人工,自动完成花椒识别、定位、采摘的花椒采摘机。利用视觉识别系统准确定位花椒果实位置,后通过机械臂无死角旋转运动,将花椒采摘装置对准花椒簇,使成熟花椒果实完全进入采摘装置中,再通过采摘装置中刀片的左右滑动将花椒簇采摘下来,花椒果实顺势通过与机械臂相接的中空软管滑落到收集装置中,完成花椒果实的采集。此机械基本实现花椒果实的自动采摘,对提高花椒采摘效率、降低成本起到一定的促进作用。
1 整体结构设计及工作流程
1.1 整体结构
图1为花椒采摘机的整体结构示意图,其结构包括360°无死角摄像头、多自由度机械臂、圆形中枢结构、带动采摘机移动和采摘装置的电源、带有锋利刀片的采摘装置、车身运动装置,以及收集装置和控制整个采摘机运动的中央控制系统。
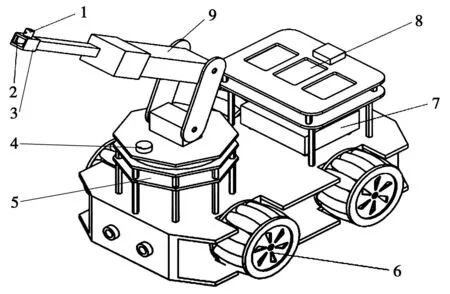
1.360°无死角摄像头;2.刀片;3.采摘装置;4.圆形中枢结构;5.收集装置;6.车身运动装置;7.电源;8.中央控制系统;9.多自由度机械臂图1 采摘机结构示意图
成熟花椒果实颜色为紫红色且成簇结实,现采用视觉识别系统定位花椒果实位置,将位置信息传输到中央控制系统,中央控制系统接收到信息后向机械臂发出指令,机械臂接收到信息后,通过机械臂的定向旋转运动将花椒采摘装置对准花椒簇,之后通过方形采摘装置中锋利的刀片左右滑动将花椒簇采摘下来,顺势通过与机械臂相连的中空软管滑落到收集装置中完成花椒果实的采集。其中无死角摄像头可360°寻找成熟花椒;机械臂为中空机械臂,方便采摘下来的花椒运送到收集装置;采摘装置中含有一个锋利刀片,以便采集花椒;中央控制系统包括视觉识别系统、机械臂运动控制系统、采摘装置控制系统和车身控制系统;车身中间与收集装置底部用螺纹管相连接;收集装置与机械臂之间采用螺纹管与焊接共同固定的方式;多自由度机械臂,带动采摘装置运动,位于收集装置上部,两部分紧密连接采摘装置。
1.2 工作流程
如图2所示,待小车到达花椒树附近位置,视觉识别系统工作,相机打开,通过HSV色彩与形状轮廓定位花椒果实,带动机械臂运动,将上部采摘装置运送到目标位置,花椒果实成簇分布,将花椒果实簇包裹起来,此时采摘装置内刀片已到达花椒果实颈部,刀片横向滑动,完成花椒果实的采集工作。花椒果实脱落,通过与机械臂相接的软管滑落到下方收集装置中,完成花椒果实的采摘和收集工作。
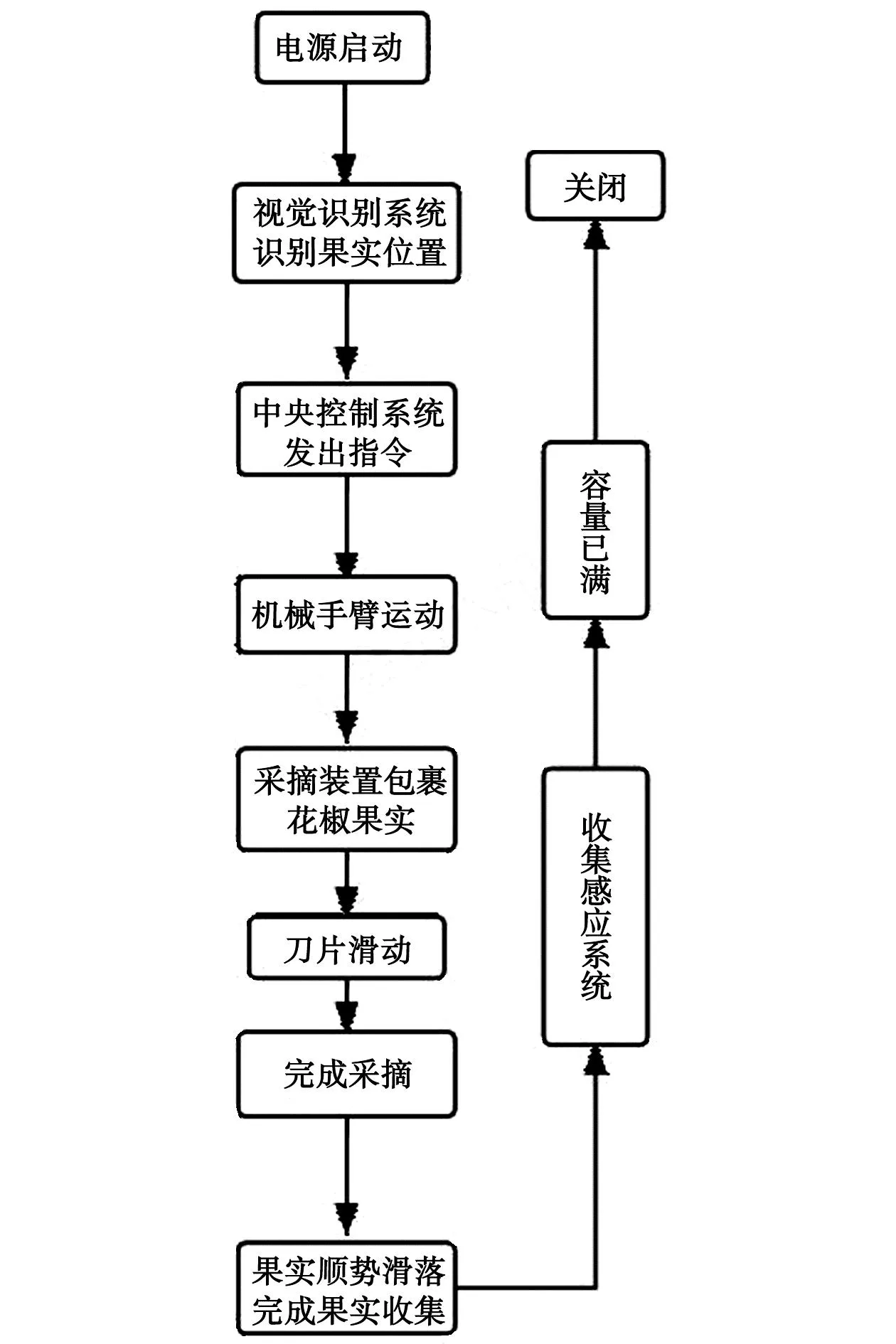
图2 工作流程图
这款花椒采摘机,机械结构轻巧、识别方式新颖,可靠性高,可远程遥控和自动运行,能代替人工来完成花椒采摘这一复杂且具有一定危险性的工作,既保证了人身安全,又提高了效率,还能降低成本。
2 关键部分设计
2.1 视觉识别系统
视觉识别系统采用HSV色彩红外识别和小波变换方式。花椒的采摘季节一般在夏季和秋季,采摘时间在7-9月,此时间段光照强烈,在可见光的映照下多呈现紫红色或淡红色,花椒果实小且成簇,小波变换方式可以增强红外与可见光图像融合,将分析后成熟的花椒果实色彩与形状信息形成不同图像系数矩阵,高频包含图像的颜色特征信息,低频包含图像的轮廓特征信息,两种图像之间对应融合锁定成熟花椒位置。当花椒果实在顺光、背光、遮阴等不同光照条件下,HSV颜色空间与形状特征融合的方法识别效率更高,利用Matlab 2012b对原图像先进行同态滤波,用图像的H分量对图像进行初步分割,再使用形态对比的方法进行识别,此种方法在遮阴条件下运行效率提高了14.6%[2]。
2.2 采摘装置
基于花椒簇大小多为3~7 cm,同一枝上花椒簇距离基本大于15 cm,采用10 cm长矩形刀片,设计整体采摘装置为15 cm×12 cm×12 cm(长×宽×高)的矩形长方体(图3),采摘装置与机械臂之间采用焊接和螺纹连接结合的固定方式。当视觉识别定位到花椒果实后,将位置信息传输到中央控制系统,发出指令,使机械臂带动采摘装置深入果实枝丫深处,此时刀片横向移动,完成采摘。
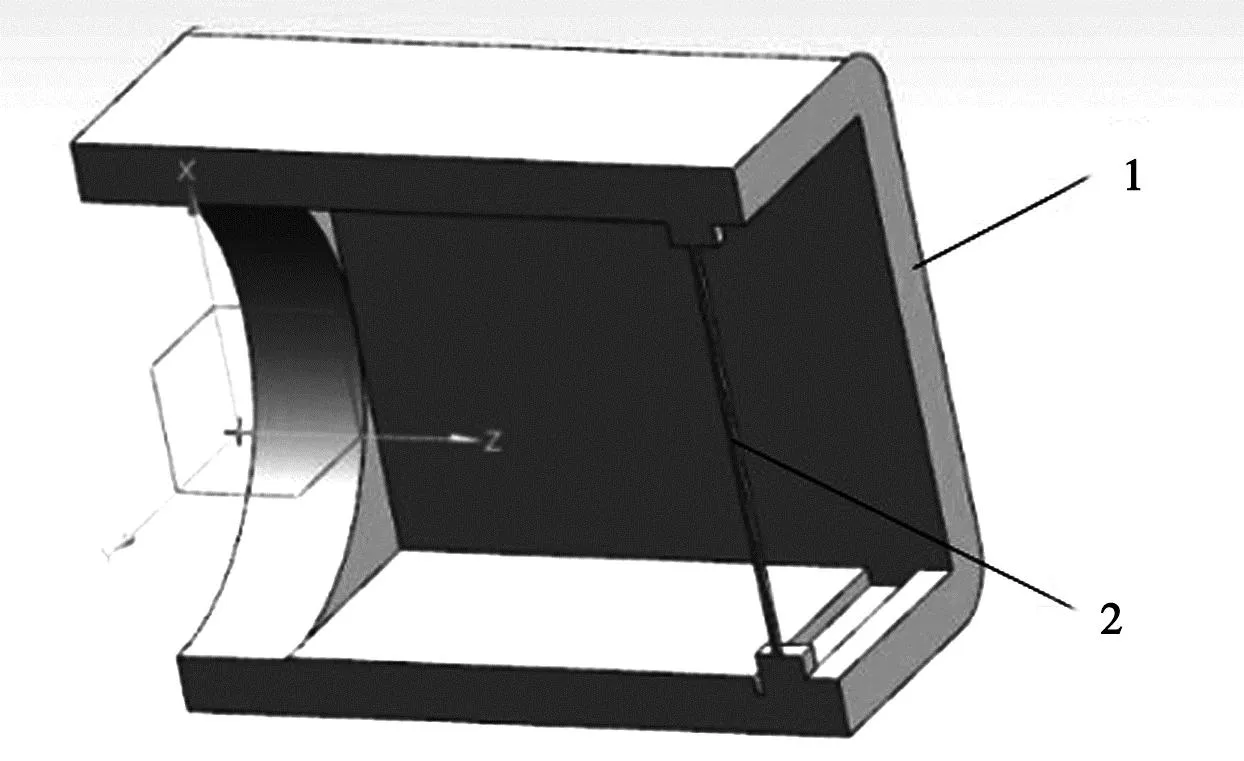
1.采摘装置;2.刀片图3 采摘装置内部结构图
2.3 中央控制系统
中央控制系统包括视觉识别系统、机械臂运动控制系统、采摘装置控制系统和车身控制系统,其位置排布依次从左向右,其中车身控制系统内含有辅助驾驶功能、GPS定位系统和4 GB内存条,可以定位、记忆若干条路段,使用者通过储存定向路段,在采摘时打开电源,车身前部通过摄像头开启路段识别工作,摄像头识别安全路段后正常行驶,使花椒采摘机按照定向路段到达花椒树附近,完成自动辅助驾驶。
3 部分元件种类及作用
图4为视觉识别系统的摄像头,摄像头采用北京市中国惠普有限公司,广角66°、1 080 p分辨率的HP320 FHD摄像头,其镜像画面清晰,无失真,而且支持1 920*1 080,30 fps,亮度和白平衡可根据环境自动适应,摄像头的上下左右可旋转15°,水平可旋转360°,可调节底座使其可直接贴于采摘装置的上部,且为USB接口,由于原接线为1.5 m,增加使用一段3 m长的惠普USB延长线即可。相比于其他摄像头,HP320 FHD摄像头价格更低,图像更加清晰,安装更方便。
图4 HP320 FHD视觉识别摄像头
图5为车身车轮,采用瑞典麦克纳姆公司的专利麦克纳姆轮,这种全方位移动方式依靠各自机轮的方向和速度,产生的合力矢量能满足任何方向上的行驶需求,保证了这个平台可以在最终合力矢量方向上自由移动,而不改变机轮自身的方向。我国花椒主产地分布在山西、河北、陕西、云南、四川等地区,其中河北及山西的山地、丘陵地区种植较广,山地、丘陵地形崎岖,地面坑洼,麦克纳姆轮能有效解决这一问题。

图5 麦克纳姆轮
4 结语
设计了一种花椒果实采摘装置,通过HSV色彩融合识别、定位花椒果实,机械臂带动采摘装置到达指定位置,利用采摘装置内部锋利刀片横向滑动,完成花椒果实的采摘,进而花椒果实顺势滑落到收集装置中,完成花椒果实的收集。随着我国花椒需求量的增长,花椒种植面积扩大,花椒采摘机能有效代替人工,提高花椒果实采摘效率,显著地降低人工成本,使该机械具有良好的推广前景。
