台风海况下半潜式钻井平台动力性能监测与分析
2023-12-21寇雨丰邹付兵
赵 前,寇雨丰,邹付兵,武 博,李 欣
(1.上海交通大学 船舶海洋与建筑工程学院,上海 200240;2.上海交通大学 三亚崖州湾深海科技研究院,海南 三亚 572024;3.中海油田服务股份有限公司 钻井研究院,北京 101149)
半潜式钻井平台具有稳性好、抗风浪能力强、甲板面积大、可变载荷大、适用水深广等特点,是世界上应用最为广泛且最具发展前途的浮式海洋油气勘探开发装备之一[1]。中国目前拥有“海洋石油981”[2]、“蓝鲸”系列[3-4]等10 余座半潜式钻井平台,中国第一座半潜式生产平台“深海一号”能源站[5]也于2021 年6 月投产。半潜式平台作业环境恶劣,一旦发生事故容易造成灾难性的后果,充分认识半潜式平台在恶劣海况下的动力性能,是保障平台安全的重要基础[6-7]。
在设计阶段,研究人员主要采用数值模拟和模型试验方法来获得平台在极端海况下的总体性能,以此来评估平台的安全性。冯爱春等[8]、李志富等[9]、闫发锁等[10]通过数值模拟或模型试验对半潜平台在极端海况下的动力响应、结构损伤等进行了研究。但数值模拟和模型试验都存在一定局限性:数值模拟输入激励、边界条件假设和模型简化会导致分析结果存在难以量化的不确定性;模型试验难以模拟大尺度结构且花费甚高。利用实海域测量技术,能够避免数值计算和模型试验由于条件假设和尺度效应等问题引入的误差,监测结果对新平台设计及平台日常运行具有重要指导作用。Brown等[11]通过水下机器人拍摄等方法对北海多座浮式平台系泊系统进行了长期监测,对系泊系统的响应及损伤问题进行了研究。Natarajan 等[12]利用光纤传感器测量了平台立管的涡激振动和疲劳载荷等问题。孙刘璐等[13]对“南海挑战”号半潜式平台进行了运动响应监测分析并进行了极值预测研究。由于平台所处海洋环境的复杂性,开展平台性能实测存在一些困难,目前的实测方案不够完善,高精度的实测资料稀缺,公开的研究成果非常有限,特别缺乏在台风等极端海况下半潜式平台性能监测分析。
针对中国某典型半潜式钻井平台,开发了一套比较完善的平台动力性能监测系统,监测内容包括平台运动、气隙、关键位置应力等数据。该系统已连续运行了5年以上,捕捉到多个台风中平台的动力响应数据,具有重要的研究价值。文中对该系统作简要介绍,同时选取台风“杜苏芮”过境期间的监测数据,分析该半潜式平台在台风海况下的动力响应性能,分析结果可为平台设计提供有力支撑,丰富相关研究内容,也对平台的抗台作业具有指导意义。
1 平台动力性能监测系统
1.1 系统简介
平台动力性能监测系统,自下而上由监测仪器、专用采集设备、数据集控中心、中控和陆地监视中心组成。监测仪器分散布置在平台的多个位置对所需监测物理量进行监测;各专用采集设备将对应监测点测量仪器获得的数据进行采集、处理、分析,形成统一格式的信息流(包括测量数据、报警信息和设备运行状态),发送给数据集控中心,采集设备通过统一授时实现时间同步;数据集控中心将信息流作本地智能存储备份,同时实时发送到平台和陆地监视中心。图1给出了该监测系统的简要架构,各部分的具体内容:
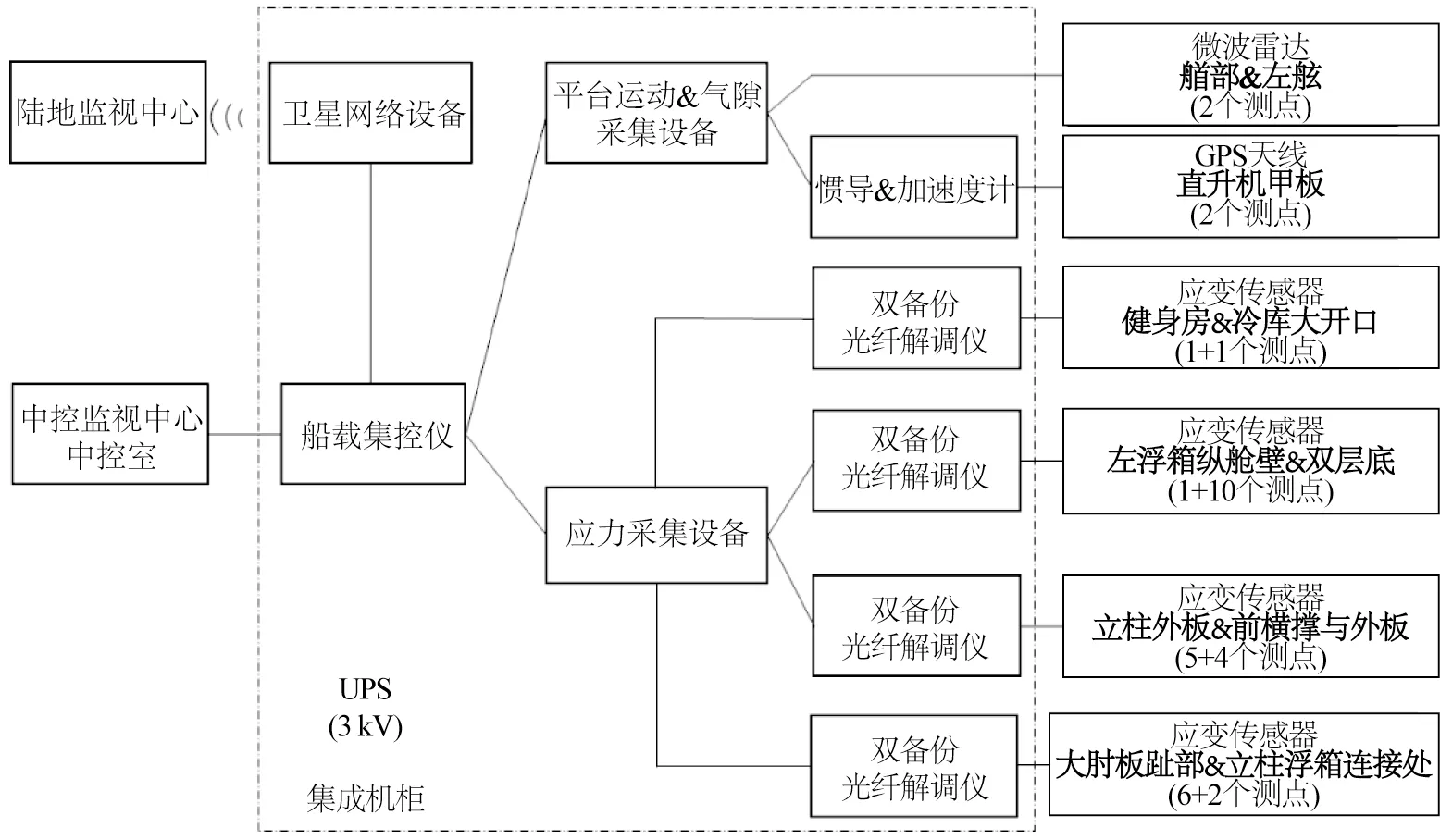
图1 平台动力性能监测系统架构Fig.1 The frame of dynamic performance monitor system
1)监测仪器:包括应变传感器、微波雷达、运动测量单元(GPS 天线、惯导和加速度计)、双备份光纤解调仪,用于监测平台关键位置处的结构应力、气隙和平台运动(位移、速度、加速度)。
2)专用采集设备:包括应力采集设备和平台运动及气隙采集设备,处理分析并形成统一格式的信息流,发送给数据集控中心。
3)数据集控中心:包含船载集控仪和卫星网络设备(终端和天线),实时汇总信息流,一方面实时发送到平台上的中控监视中心,另一方面通过卫星网络实时发送到陆地监视中心。
4)中控、陆地监视中心:对监测信息、报警信息等进行可视化显示,中控监视中心可以给平台工作人员实时发出警报,陆地监视中心还具备深度分析、专家系统、自动报告等功能。
1.2 监测仪器
监测仪器主要分为3种类型:应变传感器、微波雷达、运动测量单元。
应变传感器:每个应力测点由3 个光纤光栅应变传感器和1 个光纤光栅温度补偿传感器组成,其中3 个光纤光栅应变传感器[14]组成一个45°应变花。在传感器固定后,对传感器安装区域进行封装,避免水汽进入腐蚀传感器及平台结构,保证传感器具有较长的寿命。监测系统共计30 个应力测点,包括左前立柱艏部大肘板趾部区域6个测点、左前立柱与浮箱连接部2个测点、前横撑与左前立柱外板连接区域4个测点、左前立柱前外板5 个测点、左前立柱上方双层底内的肘板上8 个测点、双层底内PL7 和TF2 相交的下角附近2 个测点、左浮箱纵舱壁1个测点、健身房纵舱壁1个测点、冷库大开口1个测点。
微波雷达:微波雷达用于测量平台关键位置的气隙,精度达到1 cm,共有2台,分别位于平台艏部救生艇甲板和平台左舷ROV 甲板,监测平台艏部和左舷的气隙情况,如图2 所示,其中艏部雷达坐标(xwr,ywr,zwr)=(53.585 m,0 m,38.77 m)。文中利用微波雷达所测气隙结果推算环境波高,因此微波雷达安装位置均远离平台立柱,减小波浪反射对于推算环境波高的影响。
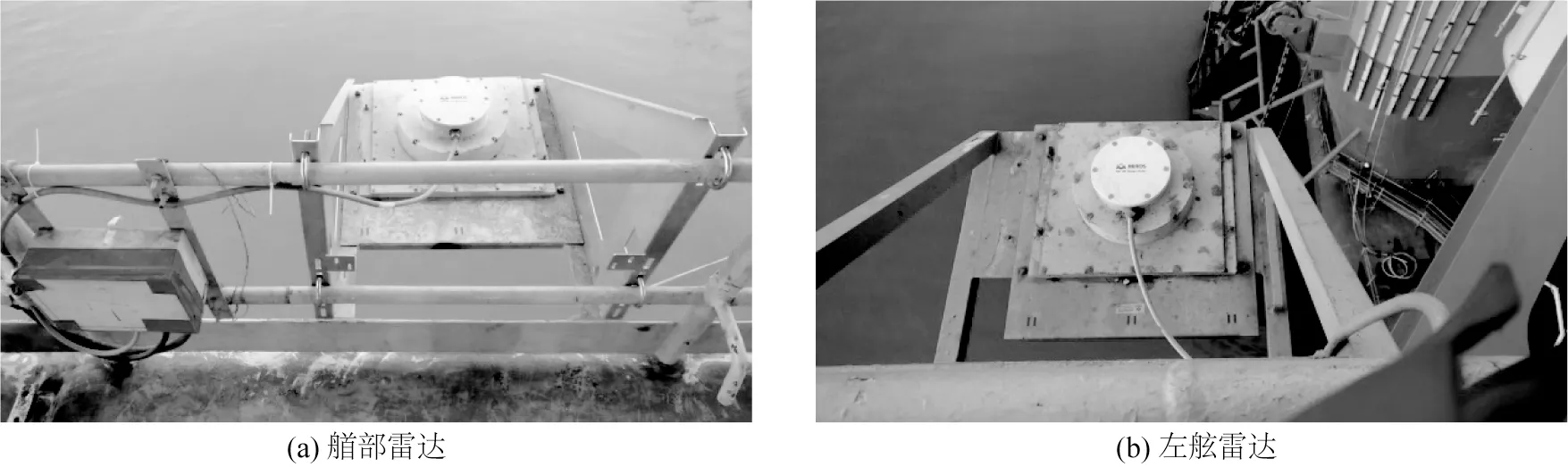
图2 平台上的微波雷达Fig.2 Microwave radars in the platform
运动测量单元:星基增强惯性组合运动测量单元可以测得平台的经纬度、偏航角、6 自由度运动(位移、速度、加速度)等,角位移精度0.01°,水平线位移精度10 cm,垂向位移精度20 cm。该单元由GPS 主天线、GPS 从天线、惯导及加速度计组成,如图3 所示,其中,GPS 主从天线安装于直升机甲板左侧围栏,惯导及加速度计安装于健身房的机柜中。GPS 主天线坐标(xgps,ygps,zgps)=(38.745 m,15.8 m,51.05 m),运动测量单元默认输出GPS主天线位置的线位移,平台其他位置的线位移需要通过换算得到。

图3 平台上的运动测量单元Fig.3 Motion measurement unit in the platform
1.3 其他组成部分
除监测仪器外,监测系统还包括专用采集设备、数据集控中心和中控及陆地监视中心。
专用采集设备包括双备份光纤解调仪、应力采集设备、运动及气隙采集设备,这些设备均安装在位于健身房的集成机柜中。
数据集控中心包含船载集控仪、卫星网络终端及卫星天线。船载集控仪负责实时汇总储存数据并进行初步的分析判断,安装于集成机柜中。卫星天线安装于直升机甲板的观察室上方,卫星网络终端也安装于集成机柜中,为集控仪提供数据海陆传输的卫星网络。
监视中心包括安装在平台中控室的中控监视中心,可以实时从船载集控仪获取显示实测数据;以及陆地监视中心,通过卫星网络获取实测数据,便于陆上专家对平台状态进行监视分析。
2 分析方法
平台局部坐标系o-xyz以及关键物理量定义如图4 所示,局部坐标系原点位于平台基线平面中心,ox轴以平台艏部方向为正,oy轴以平台左舷方向为正,oz轴以竖直向上为正。运动监测单元直接监测得到GPS主天线处的平台纵荡、横荡、垂荡运动,分别记为Xgps、Ygps、Zgps;监测得到的平台横摇、纵摇、艏摇,分别计为α、β、γ。图4中:Dm为平台平均吃水;zbd为平台箱型甲板底部高度,为30 m;ΔH为测波雷达与平台箱型甲板底部高度差,为8.77 m;Dbow为测波雷达安装位置平台艏部广义吃水;Hag为平台艏部测波雷达监测得到的气隙值;-Hag为前述Hag气隙均值,η为环境波高。
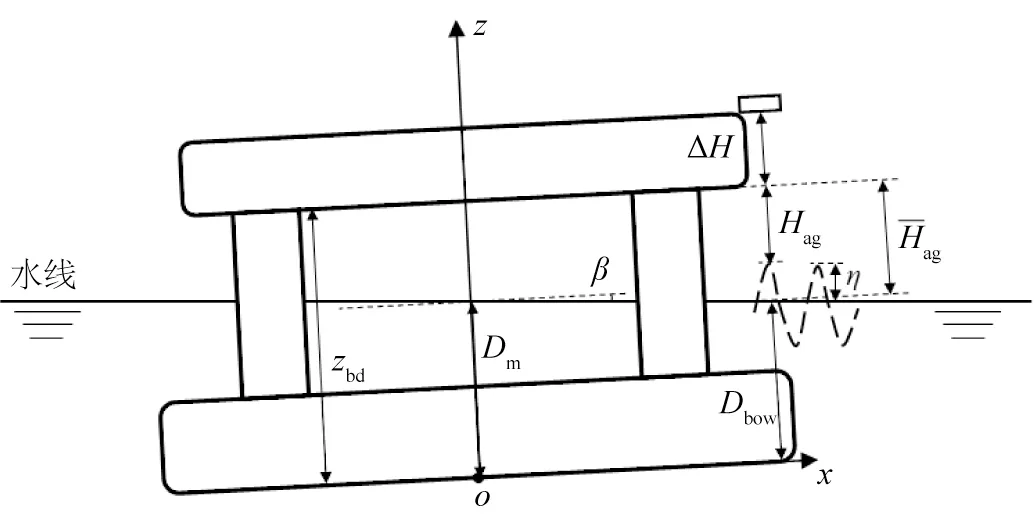
图4 坐标系及物理量定义Fig.4 Coordinate system and definition of physical parameters
2.1 平台吃水计算
海洋平台在海上作业时吃水是多变的,特别是在抗台等特殊情况下,平台操作人员会更加频繁地根据环境变化调整平台的吃水,以便航行移位或就地抗台。众所周知,平台的载况是决定其动力性能的最重要因素,因此分析得到平台吃水情况是后续分析的重要基础。监测系统中平台垂荡运动和气隙监测数据均可以作为计算平台吃水的依据,但实际中垂荡运动监测精度远不及气隙精度,因此通过平台艏部气隙监测结果来计算吃水变化情况。
平台作业时吃水将保持一个相对稳定的值,因此,气隙在某段时间内会保持在某一均值上下波动。首先计算得到气隙均值-Hag(t)(t为时间,下文同),通过低通滤波实现,截止频率设置为0.003 5 rad/s(对应截止周期为30 min),然后根据平台箱型甲板底部距基线垂向高度,得到平台艏部广义吃水Dbow(t):
求得艏部广义吃水后,由于测波雷达安装在平台中纵剖面上,可以根据运动监测单元测得的平台纵摇角β(t),计算得到平台平均吃水Dm(t):
2.2 环境波高计算
在浮动的半潜式平台上很难直接监测到环境波高时历数据,测波雷达仅仅能得到统计意义上的波浪信息,且精度较低。采用动力定位系统的半潜式平台在抗台时往往是迎浪状态,同时由于立柱水线面较小、下浮体之间距离较大,平台艏部波面受到平台影响相对较小,因此通过平台艏部气隙测量结果来反推环境波高具有较高的精度,这也是目前船载波浪监测的重要方法之一。
气隙监测结果与平台吃水、环境波高、平台运动都密切相关,需要解耦才能得到环境波高,目前常用的方法是线性解耦。艏部气隙Hag(t)可以简化的表达为:
式中:Zwr(t)为艏部雷达安装处的平台垂荡运动。
根据直接监测得到的GPS 主天线位置的平台线运动,以及平台的横摇、纵摇、艏摇角度,根据运动换算关系式,测波雷达安装处平台的线运动可以表示为:
式中:Xwr(t)、Ywr(t)为艏部雷达安装处的纵荡、横荡运动。M为角度变换矩阵[15]。
根据上述内容,艏部气隙为监测值,艏部广义吃水由式(1)求得,测波雷达处平台垂荡运动由式(4)求得。故对式(3)移项变形即可求得环境波高η(t)。
2.3 随机波浪的统计描述
实践中,线性理论被用来模拟不规则波浪并获得统计预测,沿x轴正向传播的长峰不规则波的波面升高可看作大量单元不规则波的组合[16],即:
式中:Aj、ωj、kj和εj分别表示第j个单元波的波幅、圆频率、波数及随机相位角。对于深水波,ωj和kj满足色散关系。波幅Aj可由波谱S(ω)表达:
式中:Δω是等间距频率间隔。
假设海况可描述为一平稳随机过程,针对0.5~1.0 h的一段有限时间,可以由波浪测量值计算获得波谱。国际船舶与海洋结构会议(International Ship and Offshore Structure Congress,简称ISSC)和国际船模试验池会议(International Towing Tank Conference,简称ITTC)推荐了海浪谱S(ω)。对于开阔海域中充分发展海浪,第15届ITTC推荐应用ISSC波谱[17]公式:
式中:H1/3为有效波高;T1为平均波浪周期。
式(8)给出的波谱与修正后的PM谱[18]相同,后者用平均周期T2作参数,适用于充分成长的海浪,即:
式中:mk(k=0,1,2,…)为海浪谱谱矩。
对于式(8)给出的波谱,T1与T2存在以下关系:
T0为对应于同一波谱的谱峰频率周期,表达式为:
第17 届ITTC 会议推荐了Jonswap 谱[19],该谱由“北海海浪联合计划”测量分析得到,适合像北海这类风程被限定的海域,表达式为:
式中:
当ω≤5.24/T1时,σ=0.07;当ω>5.24/T1时,σ=0.09。式(13)也可用其他特征周期来代替:
3 台风海况监测结果分析
3.1 台风信息
强台风“杜苏芮”是2017年太平洋台风季第19号强台风,其发源地为菲律宾东部太平洋海域,途径菲律宾、中国南海海域,在越南北部沿海登录,最终消逝在中南半岛[20]。中央气象台于2017年9月11日1时对其发出预报,于9月12日14时将其升格为热带风暴,于9月14日5时将其升格为台风,于9月16日17时对其停止编号。台风期间,“杜苏芮”实时路径与被测平台位置如表1所示,被测平台与台风的相对位置见图5。
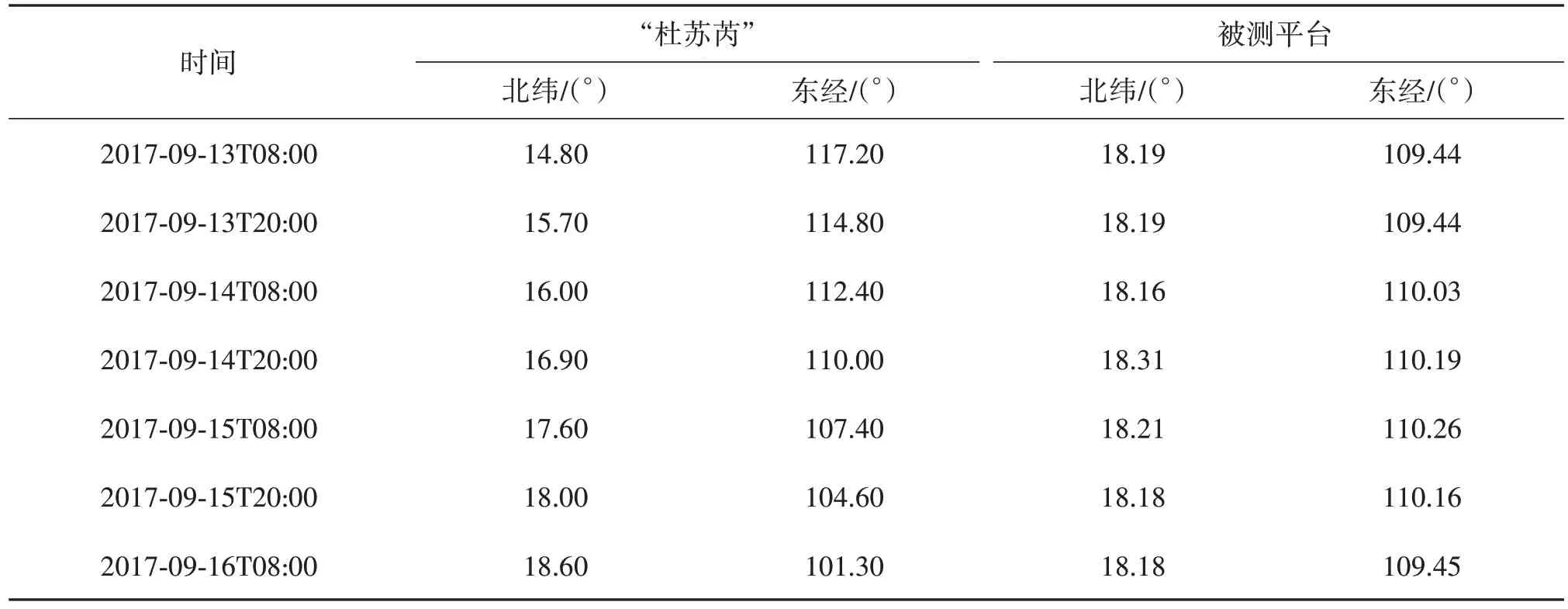
表1 台风“杜苏芮”路径与被测平台位置Tab.1 The path of Doksuri typhoon and the location of the measured platform
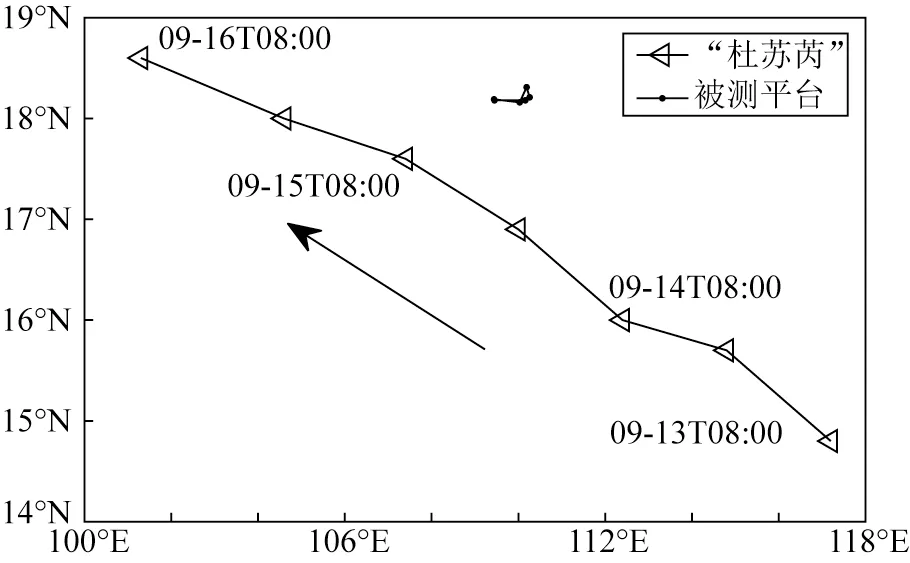
图5 台风路径与被测平台位置Fig.5 Path of the typhoon and the measured platform
由图5所示,台风中心与被测平台较为靠近的时间段为14日和15日,同时结合监测数据,充分体现平台受台风影响前后的吃水情况,初步选取13日20:00至16日20:00的监测数据进一步分析。
3.2 平台吃水分析
根据上述分析,所选时间段平台船艏气隙的时历曲线如图6所示。台风来临前(约13日22:00前),被测平台气隙值波动较为稳定且幅度较小;随着台风的靠近,气隙值波动不断增加;14日8:00至15日8:00波动较大且比较稳定,可视为被测平台受台风影响的主要时间段;随后气隙波动值逐渐下降,15日14:00后,气隙波动幅度显著下降。对艏部气隙低通滤波,根据式(1)~(2)计算得到平台平均吃水,结果如图7所示。
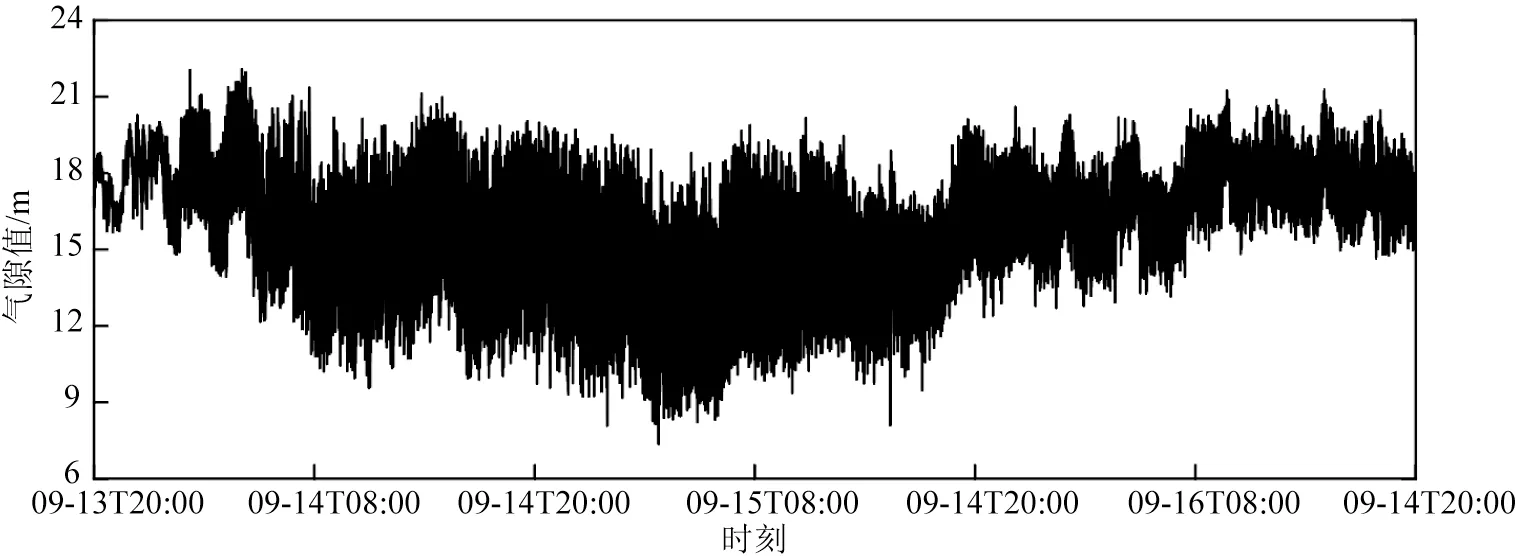
图6 台风前后平台艏部气隙值Fig.6 The air gap at the bow during typhoon
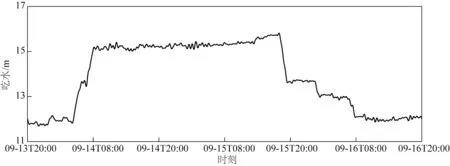
图7 台风前后平台平均吃水Fig.7 The mean draft during typhoon
图7更直观地显示了被测平台在这段时间的吃水情况,可见:14日4:00之前平台处于自航吃水状态,说明平台正在往避台地点航行;14日4:00至8:00,平台处于调载状态,由自航吃水调整到生存吃水状态;14日8:00至15日17:00,平台一直处于生存吃水状态,在原地抗台;15日17:00至16日8:00,由于台风逐渐消退,平台根据海洋环境情况进行间歇性调载,最后调整到自航吃水状态;16日8:00之后平台处于自航吃水状态,说明平台抗台作业结束正在往生产地点航行。选取部分平稳时段,统计了平台平均吃水值,见表2。

表2 典型时段吃水Tab.2 Draft of typical period
表2中,时段1为自航吃水;时段2、3、4为生存吃水,与平台设计生存吃水16 m 有细微的差别,这可能是平台操作人员根据经验而确定的调载策略;时段5为台风消退期间歇性调载的某中间吃水;时段6为自航吃水。后续内容将以时段2、3、4(分别对应后文的海况A、B、C)为例,主要分析所测半潜式平台在台风海况下的运动性能。
3.3 环境波浪分析
台风影响最显著的时段为14 日8:00 至15 日8:00。根据前述式(3)~(5)计算平台外围的环境波高,高通滤波(截止频率0.21 rad/s,对应波浪周期30 s)后得到该时段波高时历曲线,如图8所示。
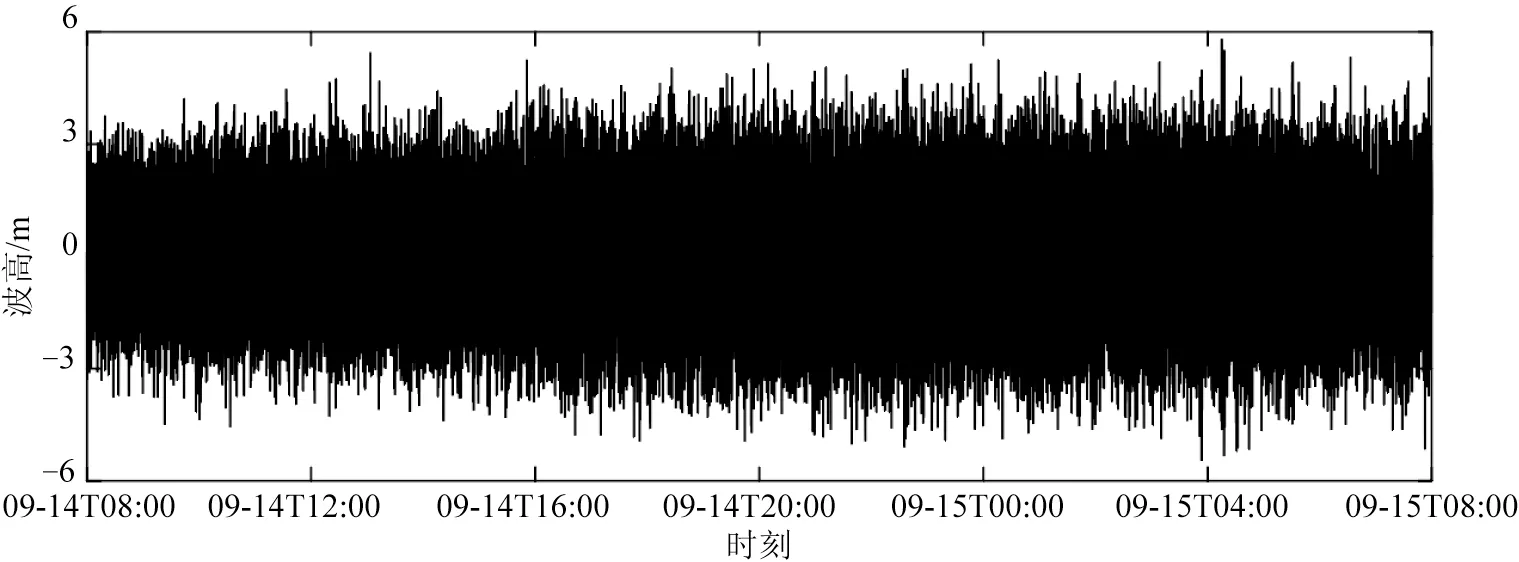
图8 24 h环境波高Fig.8 Environmental wave height in 24 h
通过随机波浪的统计描述分析,得到3.2节中所述时段2、3、4的波浪参数,见表3,包括:谱峰周期、最大波高、有效波高等关键数据。3个时段海况的波浪谱峰周期在9~11 s之间,海况B的有效波高接近6 m、谱峰周期10.47 s,与中国南海一年一遇波浪参数接近。将3 个海况波浪谱分别与相应波谱参数的ISSC 谱、修正PM 谱和Jonswap 谱进行对比,结果表明:相比于另外两个波浪谱,Jonswap 谱与实测波浪谱(波浪频率高于0.4 rad/s)吻合得更好,如图9 所示。但与Jonswap 谱不同,实测波浪谱均表现为多峰谱的特点,3 个海况波浪谱除了在0.60~0.68 rad/s 之间有峰值外,都在0.28 rad/s(对应波浪周期22.5 s)有一个较小的峰值,这说明实测波浪里同时包含了风浪和涌浪[21-22]的成分。

表3 波浪参数分析结果Tab.3 Analysis results of wave parameters

图9 实测波浪谱与理论波浪谱对比Fig.9 Comparison between measured wave spectrum and theoretical wave spectrum
3.4 平台运动分析
半潜式平台的横摇、纵摇和垂荡运动性能非常受关注。采用类似于式(4)~(5)的方法,可以计算得到平台水线面中心的垂荡运动,后续分析采用该位置的垂荡运动,为保证统一性,统一取平均吃水为15.2 m。A、B、C 这3 个典型海况下,平台纵摇、横摇和垂荡运动的时域统计分析结果如表4 所示。根据表4 结果,3 类运动的最大值与有效值差距较大,也即3 个时段内被测平台整体运动幅度较小,但仍有大幅运动,横摇、纵摇、垂荡运动的最大值分别为6.63°、5.48°、4.85 m。受运动测量单元测量精度限制,垂荡运动最大值可能存在4.1%~7.7%的误差。

表4 各海况运动时域统计分析Tab.4 Statistical analysis of motion in time domain of each sea state
对平台运动进行谱分析及幅值响应算子(RAO)分析,以便分析该平台波频运动的响应特性。RAO 计算公式为:
式中:SW(ω)为实测波浪谱;Si(ω)(i=1,2,3)分别为横摇、纵摇、垂荡响应的自功率谱。
3 个海况下平台横摇、纵摇、垂荡运动自功率谱及RAO 结果见图10~12,从图中可以看出各运动响应谱都同时具有显著的低频成分和波频成分,这两部分峰值和对应频率见表5。在台风海况下,平台运动是台风、海流、波浪以及动力定位系统推力共同作用的结果,平台的低频运动响应受风、流和动力定位系统推力影响更大,而受波浪影响甚小;与此相反,平台波频运动往往就是波浪作用下的结果,这部分运动与波浪频率一致、周期较短,是平台定位系统难以直接限制的,因此RAO 结果只展示了波频部分。平台运动RAO 的峰值和对应频率(周期)见表6。
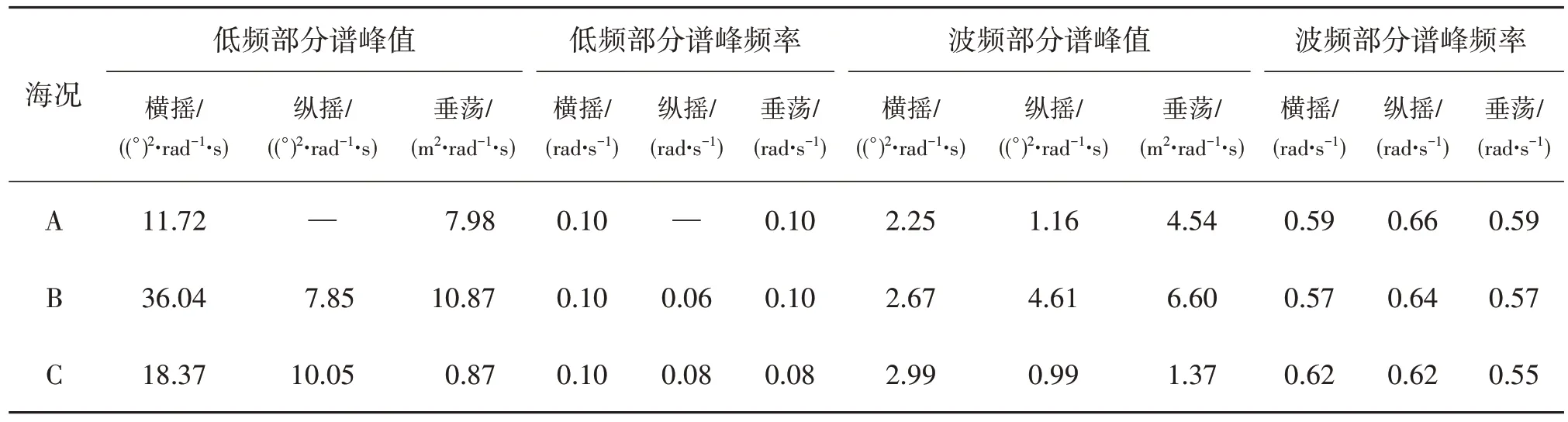
表5 各海况运动自功率响应值Tab.5 Motion response value of each sea state
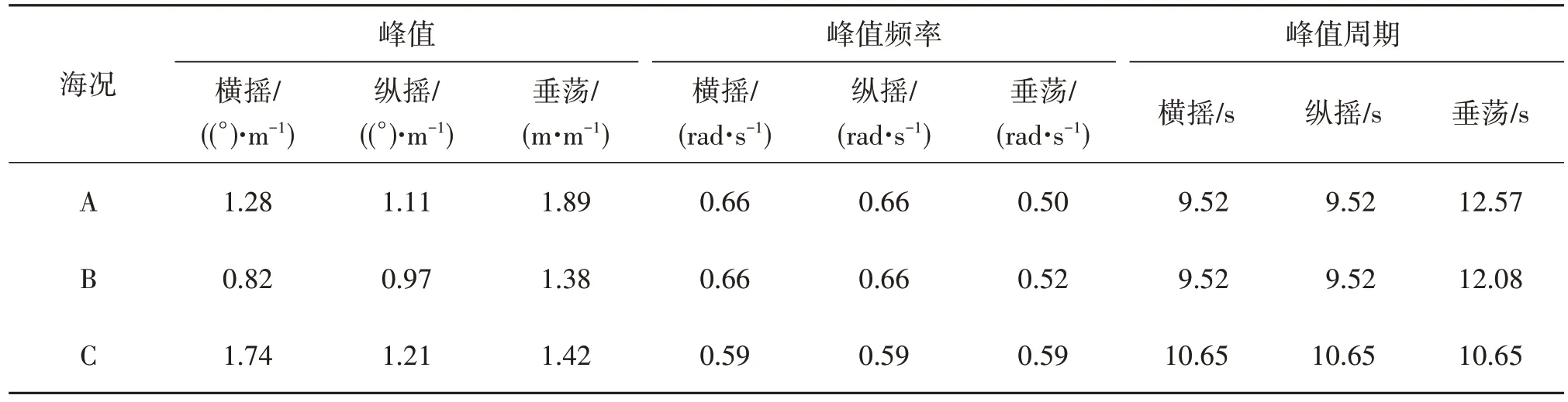
表6 各海况RAO响应值Tab.6 RAO response value of each sea state
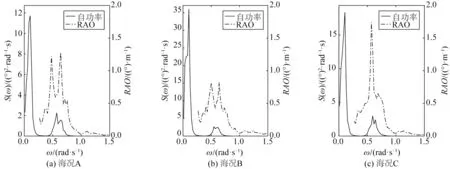
图10 各海况横摇功率谱及幅值RAOFig.10 Roll power spectrum and amplitude RAO of each sea state
结合图10和表5可以发现,横摇响应谱的低频峰值明显大于波频峰值,低频峰值频率0.10 rad/s,对应周期62.8 s,这可能与生存吃水下平台横摇固有周期接近。从图11和表5可以发现,纵摇响应谱的低频峰值也明显大于波频峰值,低频峰值频率0.06~0.08 rad/s,对应周期90 s左右,与常见的半潜式平台纵摇固有周期相差较多,可能是平台迎浪抗台时动力定位系统对纵摇产生影响导致的。从图12 和表5 看,垂荡响应谱的低频峰值与波频峰值相当,在波浪频率0.29 rad/s(对应波浪周期21.7 s)左右有一个小峰值,应该是由于垂荡固有周期与涌浪周期接近引起的。从图10~12以及表6看,波浪作用下平台横摇、纵摇、垂荡RAO幅值均较小,3个海况下同一运动模态的RAO 曲线不尽相同,这可能由3个海况波浪成分不同所引起,另外也可能由于采用线性解耦所求得的环境波高误差引起。
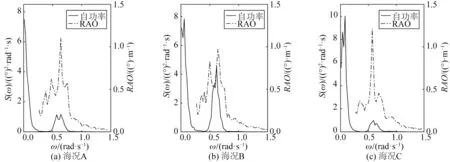
图11 各海况纵摇功率谱及幅值RAOFig.11 Pitch power spectrum and amplitude RAO of each sea state
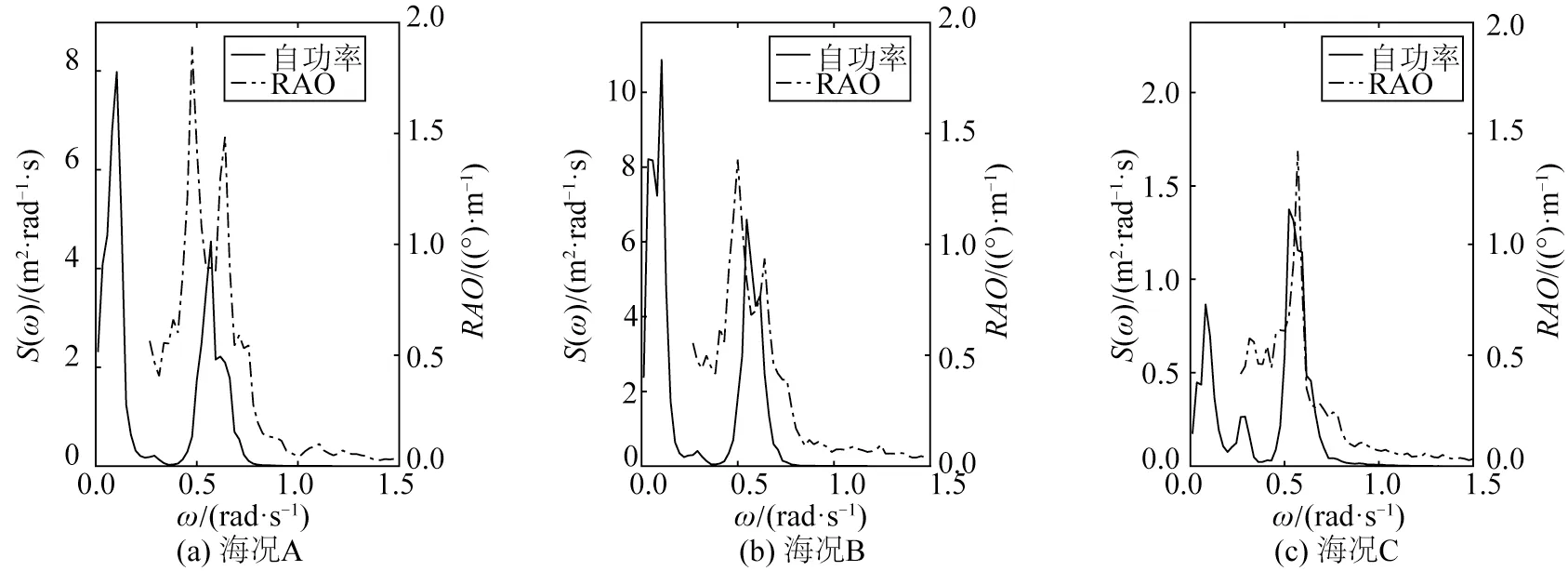
图12 各海况垂荡功率谱及幅值RAOFig.12 Heave power spectrum and amplitude RAO of each sea state
4 结 语
为弥补现有半潜式平台动力响应性能研究方法的不足,从实海域监测角度出发,开发了一套比较完善的平台动力性能监测系统,该系统可以同步监测平台运动、气隙、关键位置应力等。针对半潜式平台在台风等极端海况下实测响应数据缺乏的问题,挑选台风“杜苏芮”过境期间的监测数据,分析得到了平台吃水变化情况、环境波浪参数,并对所测半潜式平台在台风海况下的横摇、纵摇、垂荡运动响应特性进行了分析讨论。通过实海域监测获得的数据非常宝贵,随着研究的不断深入,将为海洋平台的设计、运维提供有力支撑。
另外,利用波浪气隙、平台垂荡运动等监测数据采用线性解耦方法推算环境波高,存在一定的不足之处。由于测点偏移、平台反射和绕射等原因,所得环境波浪参数会存在一些误差,这也导致了平台运动RAO结果存在偏差,后续需要研究更高精度的环境波浪随船测量方法,为准确分析平台运动RAO特征提供保证。同时,监测系统也对平台的结构应力进行了监测,后续研究将进一步利用监测数据对平台结构疲劳等方面进行分析。
