计算机辅助导航系统在颌面部多发性骨折治疗中的应用
2023-12-20薛浩伟
朱 凌,后 军,薛浩伟
(安徽医科大学第一附属医院口腔科,安徽合肥 230022)
颌面部骨骼形态不一,结构复杂精细。多发性面骨骨折多由交通意外、高空坠落、打架斗殴等导致,常表现为面部不对称、咬合关系紊乱、影响语言、进食、呼吸等正常生理功能,同时可对患者的心理造成不可逆转的影响。切开复位内固定是治疗口腔颌面部多发性骨折的常规手段,但由于操作视野不佳、医师经验差异等因素,常存在术中骨折断端无法精准复位的问题,进而导致术后遗留患侧颧骨凸出或凹陷、与健侧不对称的问题。近年来,计算机辅助导航技术在颌面部运用越来越多,该技术是现代影像、立体定向、人工智能与电子计算机技术相结合的产物,其独特的技术使得口腔颌面部多发性骨折的精准复位成为可能[1]。本研究对安徽医科大学第一附属医院口腔科收治的30例颌面部多发性骨折患者进行1:1的回顾性病例分析,比较计算机辅助导航系统手术与传统手术在治疗颌面部多发性骨折中治疗效果的差异,评估计算机辅助导航系统的有效性及精准性。
1 资料与方法
1.1 一般资料
选择2019年1月1日~2022年12月31日安徽医科大学第一附属医院口腔外科收治的颌面部多发性骨折患者30例进行回顾性病例分析。纳入标准:(1)经颌面部CT检查确诊为颌面部多发性骨折;(2)手术入路包括前庭沟切口,口外皮肤切口等;(3)选择全身状况良好,可耐受较长麻醉及手术时间的患者。术前与患者及家属充分沟通手术方法及术中术后并发症,患者及家属知情同意后签字,同时签署特殊器械使用知情同意书,所有患者均由本单位主任医师、副主任医师、高年资主治医师在上级医师指导下完成。所有患者一般资料对比差异无统计学意义,具有可比性(P>0.05)。
1.2 分组
选择符合纳入标准且行计算机辅助导航系统手术治疗患者15例作为研究组。按照1:1配比原则,选择符合纳入标准并行传统手术方法治疗患者15例作为对照组。本研究已通过安徽医科大学第一附属医院伦理委员会审查。
1.3 手术方法
1.3.1 导航设备 AccuNavi-A 导航系统,手术规划软件:上海优医基医疗影像设备有限公司。
1.3.2 术前导航治疗计划 所有患者均行颌面部三维CT重建,将三维重建数据导入AccuNavi-A 导航系统规划软件,选择枕骨隆突、鼻根点、颏前点确定镜像面,将健侧组织形态、解剖结构通过镜像配准,最终确定患侧的正常解剖位置,并模拟骨折断端复位[2](图1)。
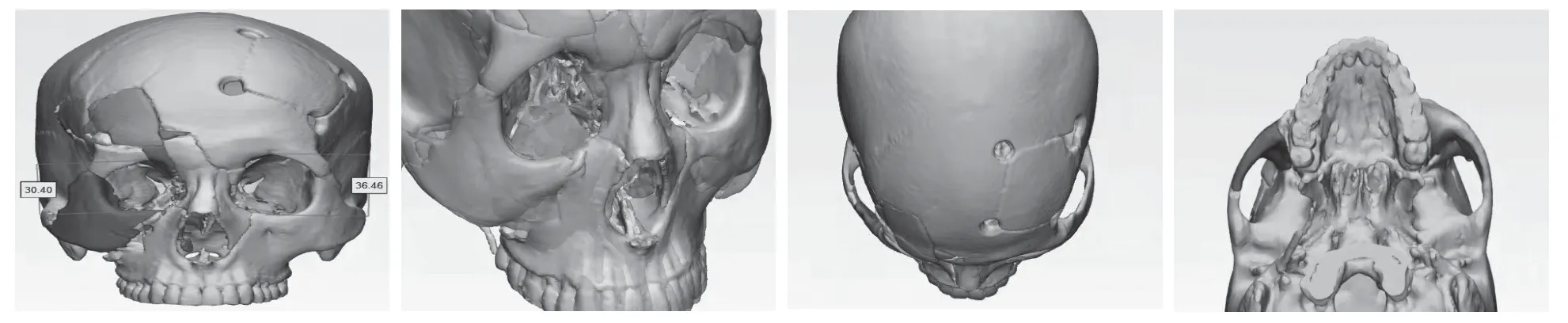
图1 术前规划
1.3.3 安装颅骨参考装置 全麻显效后,取仰卧位,垫肩,头后仰,常规消毒铺巾单。于患者头顶额骨上方发际线偏内侧适当位置做一小切口,将颅骨参考基座置于患者头部,同时安装标志球(图2),确保其始终处于同一位置,保证信号可持续传输至计算机显示实时定位图像,通过探针在口内预定的5个位点进行校准(系统误差<1 mm),确保导航的精准性。

图2 安装颅骨参考装置
1.3.4 术中复位并精准验证 以发际中点、鼻根点、下唇正中、颏前点确定面部中线及眉间点并标记。测量并记录双侧内眦、瞳孔距面部中线垂直距离及距眉间点直线距离。取口外额颞部至右耳屏前半冠状切口,切开头皮、皮下组织、帽状筋膜及颞深筋膜浅层,充分掀起头皮瓣,注意避让并保护面神经颧支及颞支,充分显露并松解骨断端,而后竭力复位面部骨折断端。在维持解剖复位基础上,导航探针在骨断端上多方位定位,显示屏显示实时三维影像,多角度验证复位精准情况,探针在骨断端边缘多点移动,可判断复位与术前设计复位的微小差距,并以此进行微调[3,4](图3),而后在以计算机辅助设计骨折复位效果为基准3D打印颌面部骨折复位效果模型上预弯制钛板(图4)。查患者咬合关系满意,而后以微型钛板钛钉行坚固内固定。查患者形态恢复及咬合关系恢复满意,冲洗创面,查无明显出血,分层对位缝合口内外切口,术后送返病房。所有患者术后复查颌面部三维CT并与术前三维CT进行对比(图5)。

图3 导航探针在骨断端上多方位定位
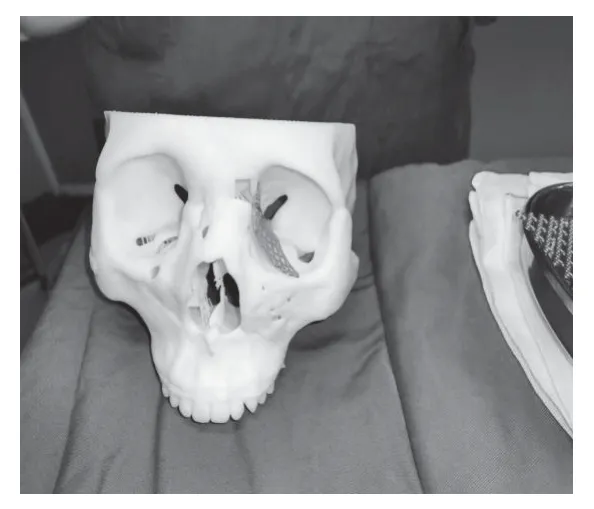
图4 模型上预弯制钛板

图5 术前术后三维CT对比
1.4 主要评价指标
1.4.1 偏差色谱分析 所有患者术后复查颌面部三维CT,将术前术后的三维CT数据以STL格式导入Geomagic Studioran 软件进行匹配,同时使用偏差色谱分析评价术后实际复位与术前规划设计之间的差异并测量其最大偏差值[5]。
1.4.2 颧骨突度值 将术后的三维CT数据导入术前规划软件,选择参考平面为头颅正中矢状面及眶耳平面,在颧弓轴位CT层面上正中矢状线设为Y轴,双侧外耳道前缘与Y轴的垂线为X轴,两交点为原点。分别测量并记录颧骨突度值:健患侧颧骨最凸点至原点的距离[6]。当双侧颧骨突度值差值的绝对值小于2 mm时视为复位效果满意。
1.4.3 预后治疗效果分级 术后6个月复查了解患者预后情况,将治疗效果分为优、良、差三级,优:面部形态恢复至术前状态,骨愈合良好,咬合关系满意,无张口受限,无复视;良:面部形态大致恢复至术前状态、骨愈合良好,咬合关系、张口受限,复视较术前有所改善;差:面部形态未改善、骨愈合差,咬合关系、张口受限,复视较术前无改善[7]。
1.4.4 统计学分析 应用SPSS 22.0统计软件,采用配对t检验比较患者术后健患侧颧骨突度值,P<0.05为差异有统计学意义。
2 结果
研究组术后一周三维CT重建与术前三维匹配光谱融合色差分析最大上偏差为2.4578 mm,最大下偏差为-2.4577 mm,平均上偏差为(0.2165±0.0156)mm,平均下偏差值为(-0.2315±0.0145)mm;对照组术后一周三维CT重建与术前三维匹配光谱融合色差分析最大上偏差为0.5215 mm,最大下偏差为-0.6214 mm,平均上偏差为(0.5846±0.0245)mm;平均下偏差值为(-0.5142±0.0641)m m。研究组与对照组相比差异有统计学意义(P=0.0214)。见表1。

表1 术后与术前三维匹配光谱融合色差分析(mm)
研究组15例患者术后健患侧颧骨突度值分别为(78.34±5.56)mm和(78.51±5.51)mm,健患侧比较差异无统计学意义(t=0.345,P=0.749);对照组15例患者术后健患侧颧骨突度值分别为(78.27±5.48)mm和(75.57±5.61)mm,健患侧比较差异无统计学意义(t=0.497,P=0.541);研究组与对照组相比较差异有统计学意义(t=0.145,P=0.0043),见表2。
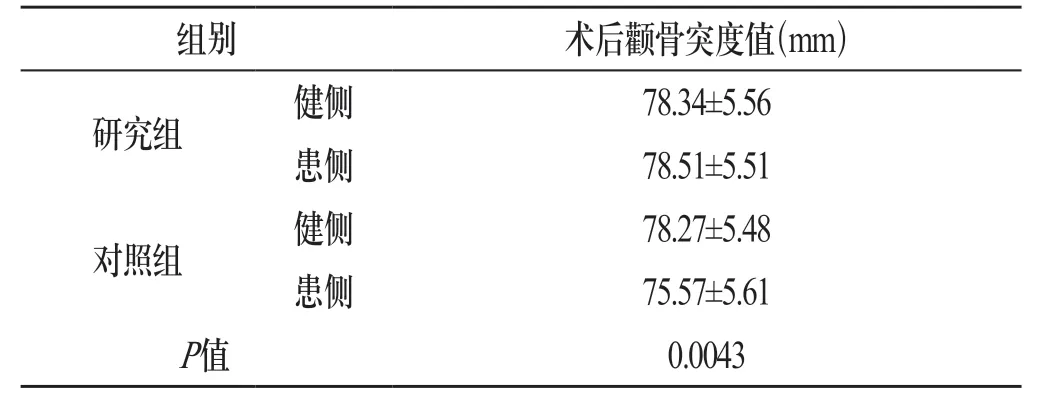
表2 术后颧骨突度值比较
术后6个月复查了解患者预后情况,将治疗效果分为优、良、差三级,研究组15例患者均获得满意治疗效果,对照组15例患者14例获得满意治疗效果,1例效果不佳,具体见表3。
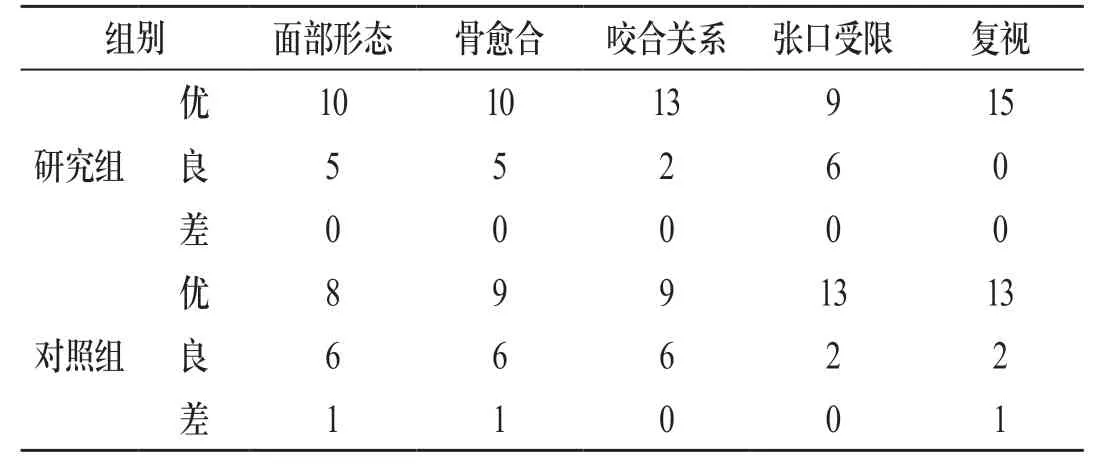
表3 术后6月治疗效果评价(例)
3 讨论
颌面部多发性骨折常造成患者面部不对称、张口受限、咬合紊乱等。以往,颌面部多发性骨折的处理多以“恢复功能,兼顾外形”为原则。随着社会发展,人们对美学要求越来越高,功能和外形双向标准渐成主流,只有术中精准复位方可恢复面部外形。人类面部的对称依据颌面部骨的对称,但人面部外形并非绝对对称,故本研究要求手术复位精度<2 mm[8]。
目前,颌面部三维CT在口腔颌面外科应用广泛,在3D模型重建后行手术判断复位的精准性已显著高于主刀医生的经验评估[8]。导航技术通过立体定向,通过人工智能与电子计算机技术相结合实时追踪手术全过程,术者可从三维方向全方位观察骨折断端与周围组织的解剖关系,并在术前模拟的同一位置进行精准复位;术前制作3D头模并预制钛板、钛网使其更加贴合,术中进行三维方向校准后方可行骨断端的内固定,更加精准[9]。这一技术已明显优于面骨骨折需依据术者经验判断复位是否准确的惯例。
术中安装头颅参考架及标志球必须保持稳定,只有保持其稳定才能使探针发送到导航系统的数据准确无误。术中应时刻保证参考架的稳定,保证标志球始终在导航摄像头的探测范围内,这样无论是口内口外切口的转换或是在复位过程中改变了头的位置,都不会对导航产生影响。即便对于无法直视的狭窄手术视野,术者也可准确定位骨断端,减少了对周围正常组织的解剖,既满足了患者的微创美观需求,更规避了损伤周围神经血管的手术风险。
计算机辅助导航系统同样也存在一定的局限性,如对资金及人力资源消耗较大,手术时间较长,增加操作时间,增加额外辐射等。此外,术前规划需用到镜像技术通过健侧的解剖结构恢复患侧的解剖结构,因此对骨折的双侧面部多发性骨折病例,计算机辅助导航系统的应用受到一定的限制。术前检查、术前手术规划等环节均会影响计算机辅助导航系统在手术中的精准度,甚至可能造成术中误差或差错,加大手术风险[10]。因此,在术中应反复多次验证导航系统对解剖位置的定位准确性。
综上所述,与传统手术方法相比,计算机辅助导航系统手术应用于颌面部多发性骨折具有更高的精准性和更好的预后效果,值得在临床上推广应用。
