基于数字底座技术的分布式轴向柱塞泵联合仿真*
2023-12-20谭顺辉洪昊岑许顺海沈文杰
谭顺辉,洪昊岑,许顺海,沈文杰,张 斌
(1.中铁工程装备集团有限公司,河南 郑州 450016;2.浙江大学 高端装备研究院,浙江 杭州 310014;3.浙江大学 流体动力基础件与机电系统全国重点实验室,浙江 杭州 310027;4.无锡雪浪数制科技有限公司,江苏 无锡 214135)
0 引 言
轴向柱塞泵具有功率密度大、容积效率高、工作压力高等优点,被广泛应用于大型工程机械、船舶机械、海工平台等重型装备中,其作为系统的核心动力源,为液压操控系统提供驱动力。
随着计算机仿真技术的发展,研究人员采用运动学、动力学联合仿真的方法,分析泵内组件的受力、运动、变形等内容,为柱塞泵的优化设计提供依据。采用联合仿真的方法能够有效地将柱塞泵的流体传动特性与机构的动力学特性相结合,可以取得更加准确的仿真结果;将其应用于产品设计环节,能够显著加快新产品的研发,同时也可以降低样机的试验成本。
国外学者最先于21世纪初开始采用联合仿真技术,进行柱塞泵的研究。德国亚琛工业大学的流体动力驱动与控制研究所[1]采用多体动力学与液压系统联合仿真的方法,开发了柱塞泵计算工具,完成了对柱塞泵的流量脉动、摩擦副等关键部分的计算任务;但其未讨论阻尼槽结构对柱塞泵性能的影响。意大利都灵理工大学的ROCCATELLO A[2]搭建了轴向柱塞泵的虚拟样机,通过试验验证了模型的准确性;但其并未将模型应用于柱塞泵关键结构的优化设计。国内,浙江大学徐兵[3]开展了关于柱塞泵联合仿真技术的研究,基于ADAMS和AMEsim构建了联合仿真模型,采用柔性组件单元完成了组件的弹性变形分析工作,该研究重点关注泵内组件的动力学特性;但其无法对柱塞泵内流道结构进行优化。浙江大学张斌[4-5]、李春光[6]开发了柱塞泵压力-流量特性计算工具,采用刚柔耦合的建模方法,研制了ViSPA计算软件,讨论了不同阻尼槽结构对输出压力-流量特性的影响;但上述研究在对关键结构进行优化设计时,计算过程过于离散,效率不高。蔡金典等人[7]采用联合仿真方法研究了电静液作动器(electro-hydrostatic actuator,EHA)的压力流量特性,对柱塞泵正反转切换过程中的脉动特性进行了分析;但其未对柱塞泵元件结构进行优化设计。童水光等人[8]采用Kant-Huston方法建立了柱塞泵多体力模型,分析了机液耦合作用下柱塞泵的运动特性,仿真结果具有较高的准确性;但上述研究的建模难度大,对技术人员专业性有着极高的要求。
目前,联合仿真技术已成为全球柱塞泵制造企业的主要设计方法,德国Rexroth、美国Eaton、Parker,中国的林德液压、恒立液压等均将其应用于新产品研发环节,极大地缩短了产品的研发周期,提升了产品的性能;但现阶段的联合仿真方法具有较高的建模离散性,优化环节需要不断地重复建模,导致其优化效率偏低,对计算资源有着过高的要求。
针对轴向柱塞泵的优化设计环节,笔者提出基于数字底座技术的分布式联合仿真优化方法,以实现关键结构的自动优化目的,提升优化设计的效率。
首先,建立柱塞泵运动学动力学联合仿真模型;然后,分析研究柱塞泵内组件的运动、受力和组件变形特性;最后,开发基于数据底座的联合仿真协同组件,完成联合仿真计算结果与优化组件的协同及阻尼槽关键参数的自动优化工作。
1 柱塞泵主轴系动力学分析
此处,笔者以掘进机用某型号大排量重载轴向柱塞泵为研究对象。该大排量重载轴向柱塞泵的缸体柱塞孔采用锥型分布,具有较好的对中、对心能力。然而,锥型缸体在重载工况下会产生较大的离心作用力,导致柱塞滑靴组件受到较大的径向力作用,柱塞泵内各部件的运动高度耦合,在高速重载工况下,易发生滑靴脱靴与球头结构断裂问题。
因此,还需要在动力学模型中构建柱塞结构的柔性体模型,分析球铰连接处的应力应变特性。
1.1 缸体结构及受力分析
柱塞泵缸体结构如图1所示。
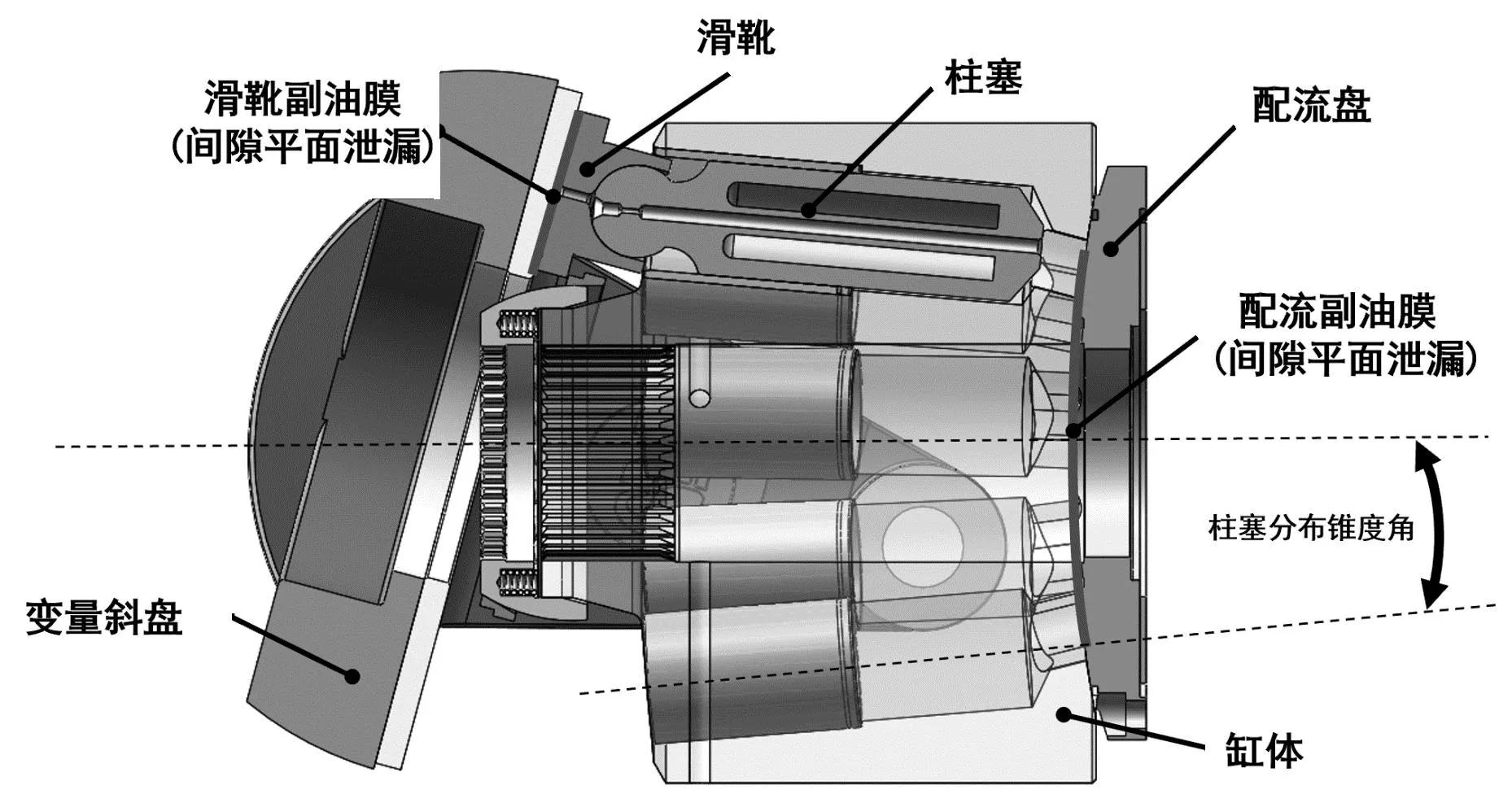
图1 柱塞泵缸体结构Fig.1 Piston pump cylinder structure
笔者对柱塞泵运行过程中柱塞泵内组件的受力分析如下:配流盘与缸体以及滑靴与斜盘之间存在静压支撑油膜,其受力方向竖直于摩擦副平面,在正常工况下,受力保持平衡。
柱塞组件受力较为复杂,其受到包括油液的压力、斜盘的推力、柱塞腔的摩擦力、柱塞绕主轴转动产生的离心力以及自身的重力等作用,在柱塞绕主轴高速转动时,易破坏柱塞的运动平衡,这使得柱塞组件是泵内最易出现失效的结构之一。
1.2 组件约束关系分析
在进行柱塞泵组件运动学建模之前,笔者需要对组件的约束关系进行分析,泵内运动副约束关系为:主轴相对于轴承端盖做旋转运动;轴承端盖相对于壳体为固定副,因此将轴承端盖视为壳体一部分,对主轴添加旋转驱动副。
将斜盘安装在斜盘座上,在变量机构的驱动下,其绕转轴转动,设定斜盘与斜盘座为旋转副;滑靴贴紧在斜盘上做平面运动,不考虑滑靴在斜盘面上的跳动,施加平面运动副;柱塞球头与滑靴球窝通过球铰副相连;柱塞相对于缸体而言,在柱塞孔中以滑动副形式做直线往复运动,由于该缸体是锥型缸体,柱塞的运动方向与主轴成固定锥角。
2 联合仿真模型搭建
2.1 参数及假设
柱塞泵模型的主要结构参数如表1所示。
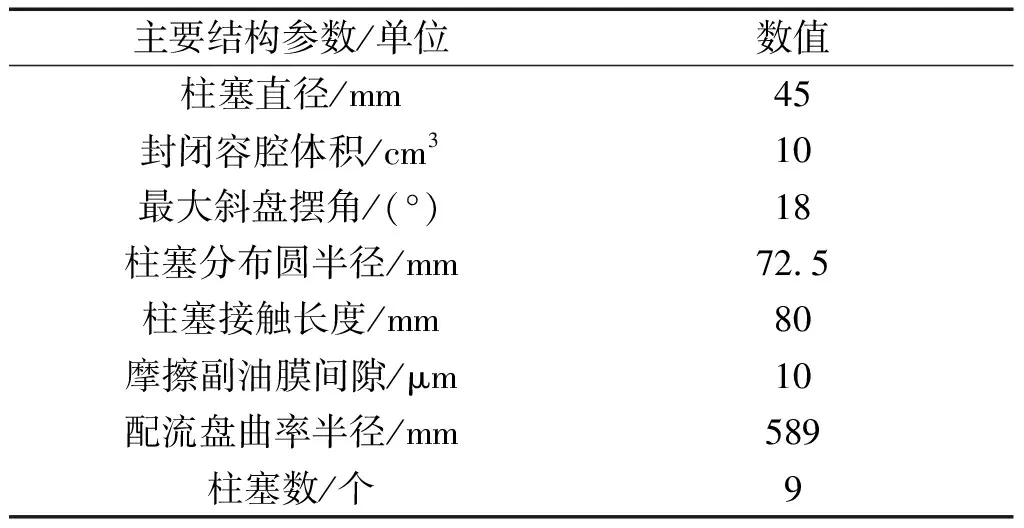
表1 柱塞泵模型的主要结构参数
为计算变量过程中泵内运动组件的运动学、动力学特征,笔者对模型提出如下简化假设:
1)轴向柱塞泵运动组件模型包括主轴、斜盘、滑靴、柱塞、壳体,忽略辅助部件;
2)柱塞泵为正常工况,不考虑故障;
3)主轴旋转驱动稳定,不考虑主轴的跳动问题;
4)斜盘在正常工况下稳定摆动,且始终处于有效工作范围。
2.2 仿真模型
笔者将上述结构参数导入ADAMS,得到了缸体转子组件模型,如图2所示。
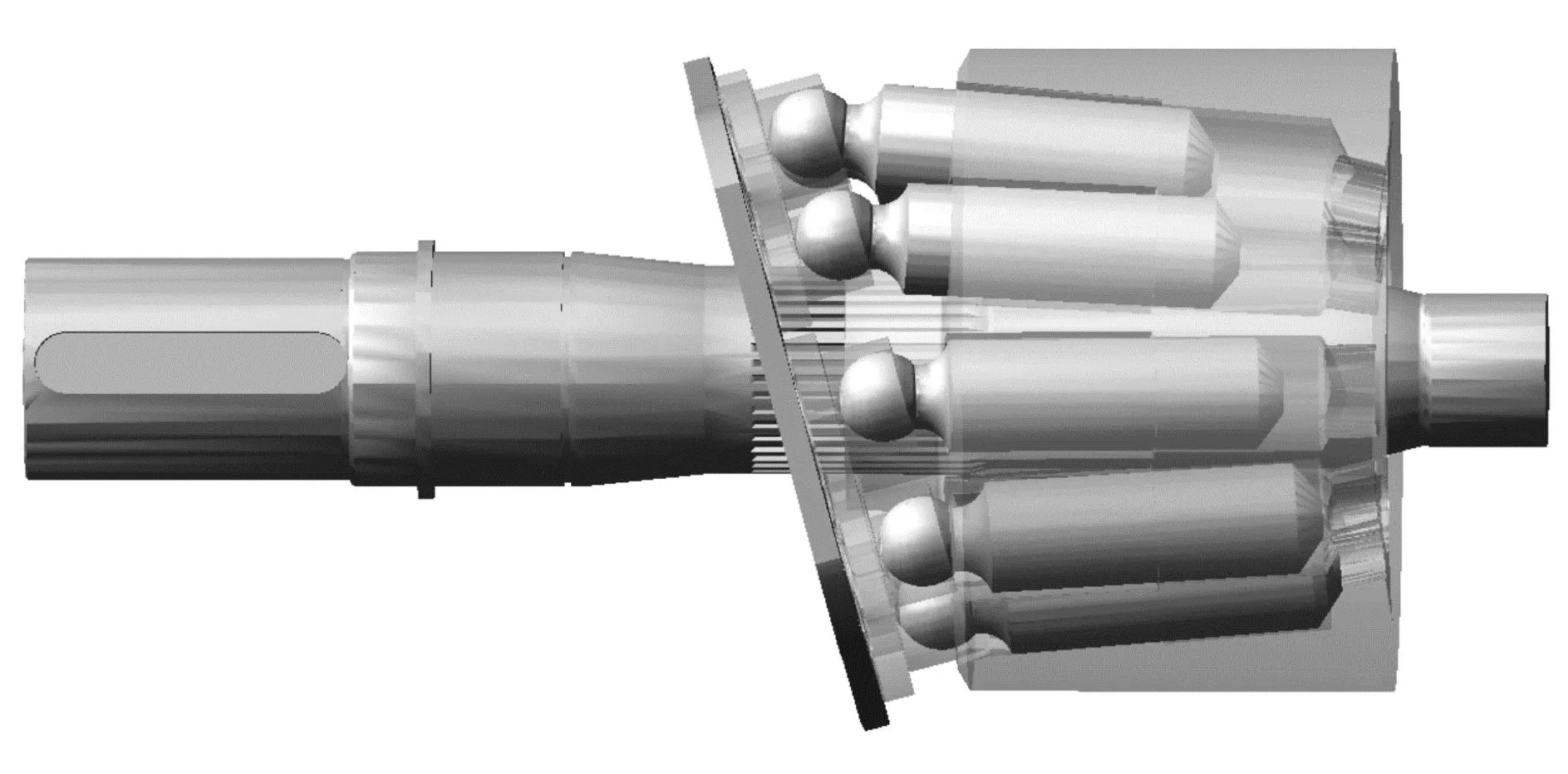
图2 缸体转子组件模型Fig.2 Cylinder block rotor assembly model
笔者在ADAMS中施加柱塞泵各组件的运动约束。将地面作为固定参考系,传动轴相对于主轴线方向做旋转运动;柱塞在滑靴牵引力的作用下,在缸体孔内作往复直线运动;滑靴在回程盘作用下紧贴斜盘;进一步对柱塞结构做柔性化处理,导入柔性体模型车[9-10]。最后,搭建联合仿真数据接口,实现软件间的数据交互目的。
进一步,笔者在AMEsim中搭建了柱塞泵的液压系统模型,采用液压元件设计库(hydraulic component design,HCD)对柱塞泵的液压子系统进行了建模[11-12],包括柱塞模型、配流模型、斜盘模型、摩擦副泄漏模型、开式节流负载模型。
根据刀盘掘进系统的多泵协同工作特点,搭建了负载模型,模拟实际刀盘掘进工况下柱塞泵的负载情况。
柱塞泵系统仿真模型如图3所示。
图3中,笔者搭建了单柱塞模型,并定义不同柱塞间的相位差,完成了9柱塞构型柱塞泵的建模工作。其中,摩擦副泄漏模型采用参数化方程进行定义[13-14]
3 联合仿真结果分析
笔者对仿真工况参数设置如下:
主轴转速为1 500 r/min,负载压力为35 MPa,入口压力为2 MPa,初始的斜盘倾角为18°。

图3 柱塞泵联合仿真模型Fig.3 Co-simulation model of the piston pump
柱塞质心速度曲线如图4所示。
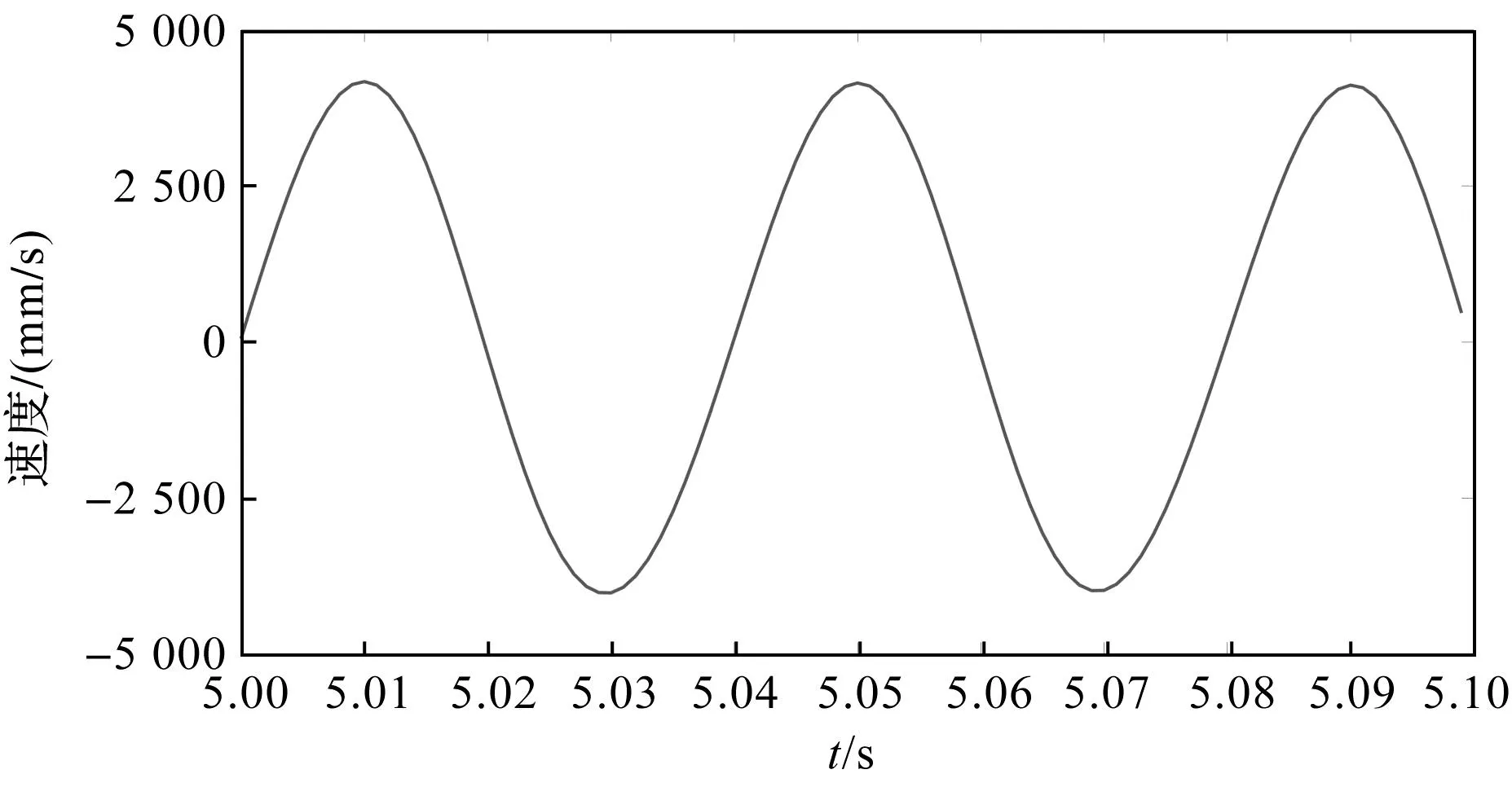
图4 柱塞质心速度曲线Fig.4 Velocity curve of piston center of mass
柱塞在腔体内做往复运动,柱塞的接触长度为80 mm,死区容积为10 mL。柱塞往复运动的速度与位移同周期,速度的极大值为4 m/s。当柱塞运动至上下死点时,柱塞的速度为0。
单柱塞的柔性化仿真结果如图5所示。
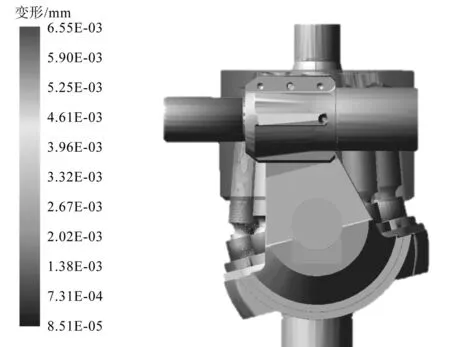
图5 单柱塞的柔性元件仿真结果Fig.5 Simulation results of the flexible components of a piston
由图5可以看出:在柱塞泵变量的过程中,当柱塞运动至上下死点位置时,柱塞球头的应力集中最为明显。由于离心作用,柱塞球头的侧向应力最大,导致球头受到径向力作用,这破坏了球头内支撑油膜并造成柱塞球头与滑靴的磨损。
笔者进一步对柱塞的受力特性进行分析。在油液压紧力、弹簧力以及回程盘结构的共同作用下,斜盘与滑靴-柱塞结构被紧压在斜盘上,斜盘的动力学特性会反馈给滑靴-柱塞机构。
柱塞受力曲线的周期为0.04 s,当柱塞运动至高压区时,柱塞最大受力为40 kN;当柱塞略过上死点位置时,由于阻尼槽的作用,柱塞的受力开始下降,随着柱塞腔与配流盘形成封闭容腔,柱塞的受力维持在高位;当与低压区接触时,柱塞受力骤降至5 kN。
柱塞受力随时间变化关系图如图6所示。
在该案例中,笔者设置斜盘摆角由水平位置摆动至最大摆角位置。在柱塞泵由小排量工况向大排量工况变量时,柱塞的受力由最初零摆角时的受力平衡状态变成显著的高低压周期性受力。
由图6可以看出:在变量过程的初期(0~7°),柱塞在高低压区的受力差值的梯度较大,当斜盘摆动超过7°后,柱塞在高低压区的受力差基本维持恒定。
上述现象发生的原因在于:在变量的初期,柱塞泵在小排量工况下,滑靴副的支撑油膜尚未建压,柱塞腔在高低压区的受力差值较小;随着斜盘摆角摆动至7°时,此时由于柱塞泵已经完成建压,柱塞腔的受力保持恒定。
在变量初期,柱塞受力快速增大的过程中,柱塞受到的冲击较大,是最易出现损伤结构的阶段。
变量过程中,柱塞的受力与时间的关系如图7所示。
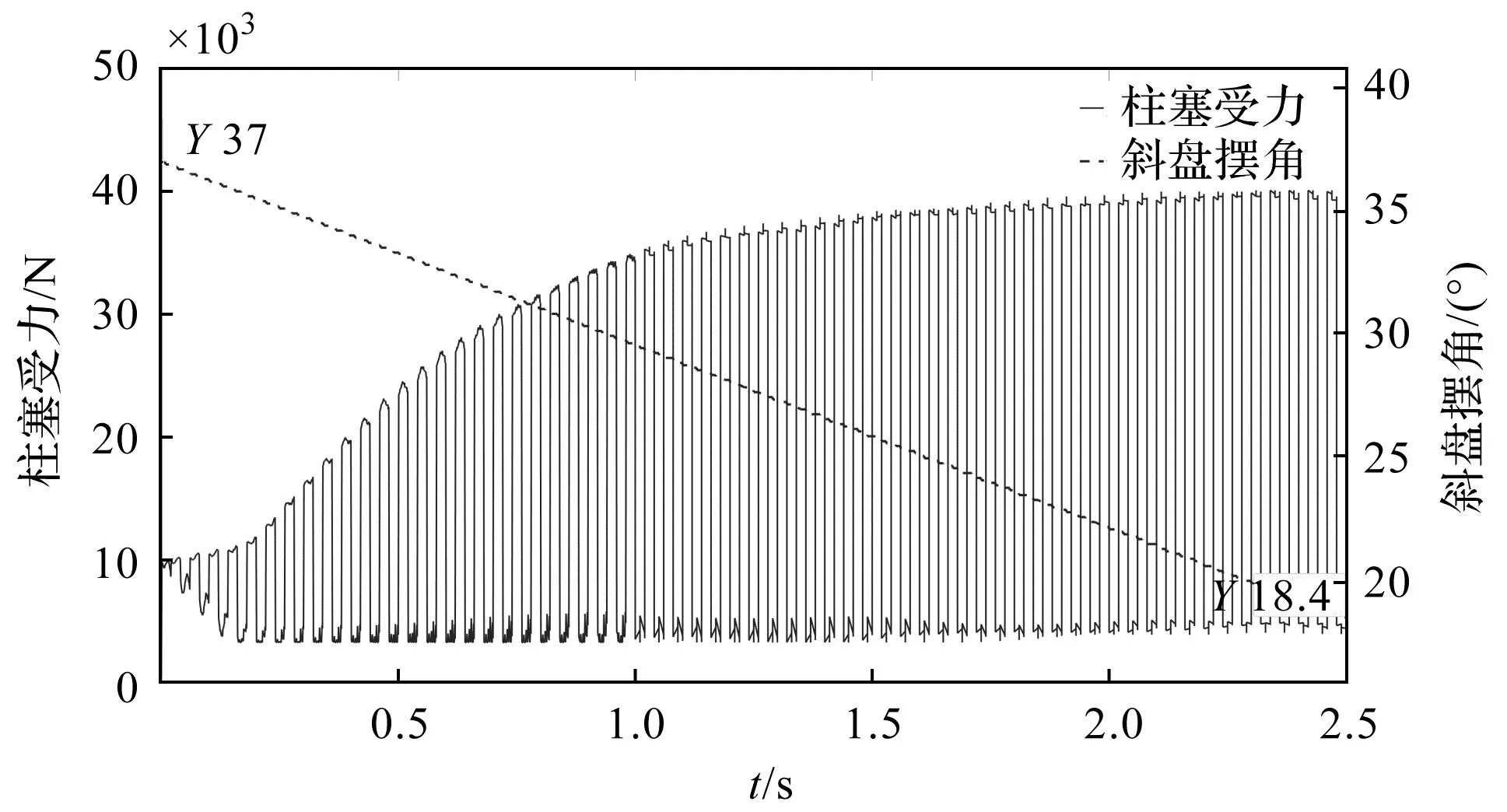
图7 变量过程中柱塞的受力与时间的关系Fig.7 The relationship between the force on the plunger and time during the variable process
由图7可知:斜盘的受力主要包括柱塞滑靴机构对斜盘的压紧力和变量机构的驱动力。当斜盘由最小摆角摆动至最大摆角的过程中,斜盘的受力增加至200 kN,随着摆角继续增大,斜盘的受力波动剧烈。
其原因在于:配流过程中,各个柱塞腔内的压力实时变化,由于柱塞的合力作用在斜盘上体现出周期性波动。斜盘的力矩在0~7°变量过程中程线性增加,随后趋于平缓,这与柱塞腔内受力的趋势一致,主要是由于小排量变量过程中存在容腔建压环节,导致斜盘由0摆角变量初期的力矩变化梯度较大,并在斜盘摆角大于8°后趋于平稳。
斜盘受力、斜盘力矩和斜盘摆角曲线如图8所示。
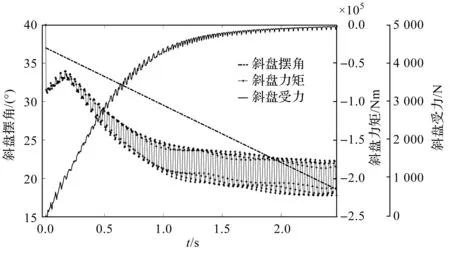
图8 斜盘受力、斜盘力矩和斜盘摆角曲线Fig.8 Curves of swash plate force, swash plate moment and swash plate angle
4 基于数字底座的联合仿真平台
为了更好地完成联合仿真模型与优化设计模块的耦合工作,基于数字底座的联合仿真平台,笔者分别搭建了联合仿真模板和优化设计模板,并采用云端接口对模块进行了连接,实现仿真计算与优化算法的联动目的。
4.1 数字底座技术
数字底座是一种基于现代化技术架构的数字基础设施。它包括了一个或多个组件,如数据平台、云平台、物联网平台、人工智能平台和安全性、监控和管控工具等,这些组件都是相互关联和融合的,为企业数字化提供了支持和基础设施。数字底座为企业提供了可靠、安全、连续性的技术基础环境,帮助企业实现数据的统一存储、分析、管理和应用,同时提高企业中的协同能力和经营决策效率。数字底座可以有效加速企业数字化转型,使其更加敏捷、有弹性、可扩展、可管理,从而提高业务价值。
数字底座技术能够为产品的设计与优化环节提供可模块化的功能平台,通过分析数据的互联与分析,实现仿真计算与优化计算的流程化管理。基于数字底座技术可开发功能性模板组件,并对其进行关联与融合,为企业数字化提供了支撑,同时提高企业设计环节的设计效率。
4.2 联合仿真分析
笔者采用功能模型接口(functional mock-up interface,FMI)将联合仿真的时序交互控制权从仿真软件转移到平台上,并搭建网页端的用户分析界面。
联合仿真分析界面如图9所示。
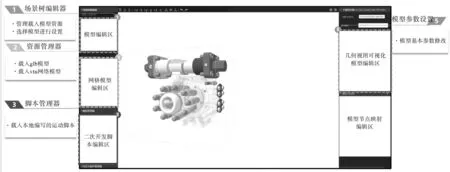
图9 联合仿真分析平台界面Fig.9 Interface of co-simulation analysis platform
联合仿真数据核心组件处通过发布/订阅通信模式接收功能模拟单元(functional mock-up unit, FMU)注册信息并进行展示,然后根据FMU信息建立联合仿真数据传递关系。在设置完仿真运行配置参数(包括仿真启/停时间、通讯步长等)后,各FMU组件采用网络接口交互控制仿真步,进行联合仿真计算的推进。同时,通信节点根据联合仿真控制模块交换数据,直至仿真达到终点,而后下发仿真终止指令,释放仿真资源。
仿真结束后,笔者将AMEsim的结果文件与ADAMS的结果文件以流计算的形式下发解析。完成解析后,将所有结果文件下发至结果分配组件,进行输出端口配置;最后,将不同变量的结果分配至前面板,展示组件。在轴向柱塞泵数字底座联合仿真平台上,用户能够实现多个仿真模板的模块化互联,并根据需求搭建优化解算方案。
配流盘自动优化设计模板如图10所示。
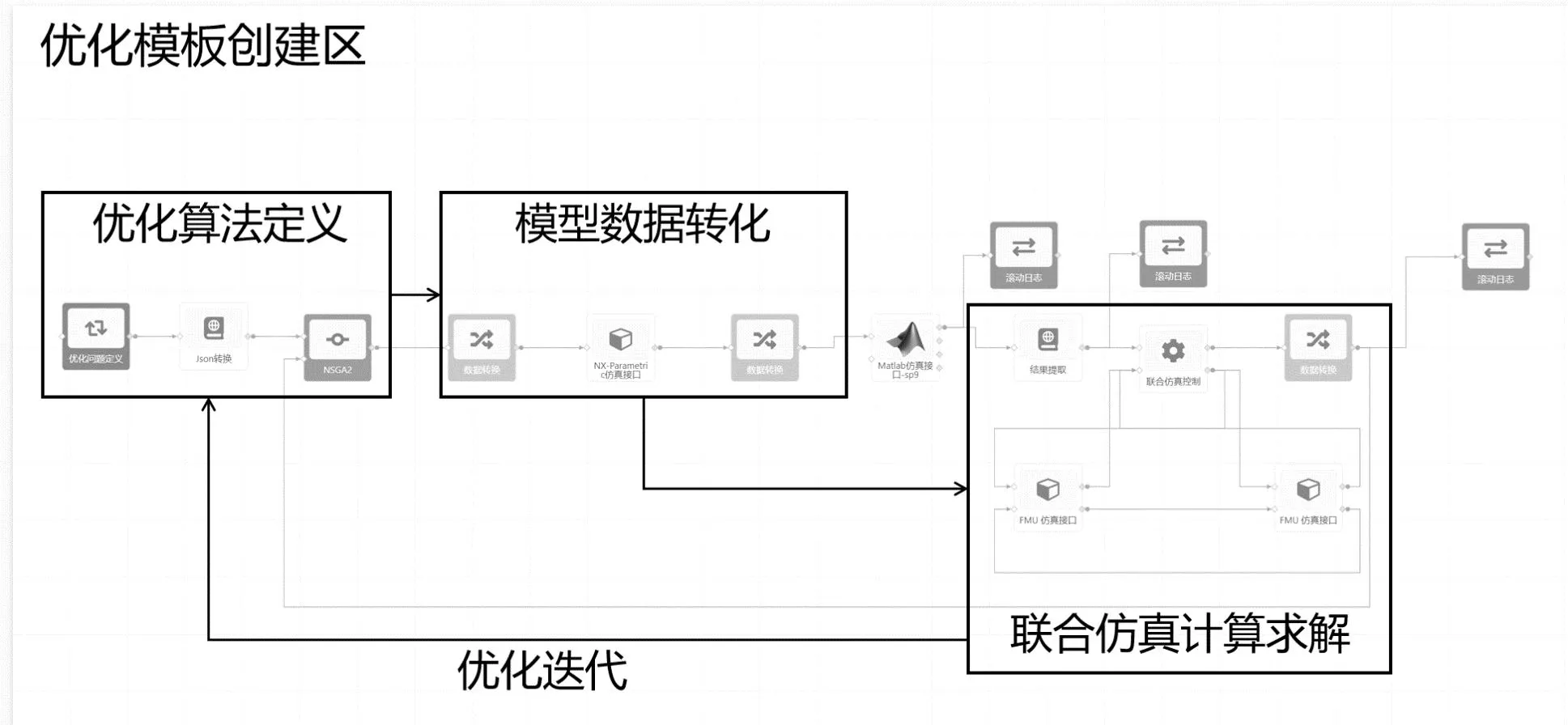
图10 配流盘自动优化设计模板Fig.10 Automatic optimization template of valve plate
根据轴向柱塞泵配流盘的配流机理可知[15-16]:柱塞泵的输出压力-流量脉动特性与阻尼槽的过流面积曲线直接相关,针对阻尼槽的结构优化的本质即为优化过流面积的变化规律[17-18]。
为此,基于模板组件,笔者在联合仿真平台上搭建自动优化迭代的流程,以实现配流盘阻尼槽的自动优化目的。
优化问题定义模板如图11所示。

图11 优化问题定义模板Fig.11 Optimization problem definition
笔者通过开发二次组件,完成配流盘模型的自动结构更新、流场提取和过流面积计算工作,将归一化处理后的过流面积数据采用流计算方式,下发至联合仿真控制组件,将阻尼槽过流面积的计算结果导入AMEsim配流模型,并采用联合仿真模型,以当前的控制曲线进行初始化并计算求解,将AMEsim的出口流量脉动率及ADAMS的斜盘合力脉动率作为当前个体的适应度,交由算法评估,利用优化算法综合当前迭代的种群个体的适应度后,进行精英选取,并进入下一代继续迭代。
经迭代优化计算后,笔者得到Pareto前沿面[19-20],使用最小距离法在最优解集中提取最终解。通过对导出的Pareto前沿面的优化结果分析,可以得到阻尼槽的最优结构参数[21-22]。
采用基于数字底座的联合仿真平台进行联合仿真,可以高效地对多个软件进行联动和数据交互,同时通过定义自动优化模板,可以将联合仿真结果与优化模板链接,实现对阻尼槽结构的自动优化目的[23-24]。
相比于传统的仿真优化方法,该方法能够在平台端对优化的流程进行定义,只需要设定优化目标即可完成阻尼槽结构的优化求解和建模工作,避免了大量的重复建模工作,显著提升了优化设计效率。
5 结束语
针对现阶段联合仿真技术离散化程度高、优化迭代过程需要大量重复工作的问题,笔者提出了一种基于数字底座技术的分布式轴向柱塞泵联合仿真方法,该方法能够在云端完成对联合仿真模型的调度和数据交互工作。
研究结果表明:
1)通过搭建轴向柱塞泵运动学、动力学联合仿真模型,完成了泵内部核心组件运动与受力的分析工作。进一步对变量过程中柱塞泵内柱塞-滑靴组件受力、斜盘的受力进行了分析。仿真结果表明:在由小排量变量至大排量过程中,在斜盘摆动初期,柱塞的受力变化较大,造成的冲击较大,是最易导致柱塞滑靴损伤的阶段;
2)基于数字底座技术搭建了柱塞泵联合仿真云端分析平台,提出了一种可模块化的阻尼槽自动优化方法,对联合仿真与优化设计进行了组件模块化,以方便设计人员进行模板调用;
3)基于分析平台,进行了联合仿真数据的实时调用与联动,开发了阻尼槽自动优化模板,完成了阻尼槽关键参数的多目标优化的流程自动化工作,无需重复性建模工作,即可实时更新优化模型,提升了优化设计效率。
后续的研究计划中,笔者将开发柱塞泵的油膜特性结算模板,通过数据接口联合计算流体力学仿真分析软件,对柱塞泵摩擦副油膜的动态特性进行求解。
