新型两平移一转动并联机构的拓扑设计及性能分析*
2023-12-20耿宗海沈惠平杨廷力
耿宗海,李 菊,沈惠平,杨廷力
(常州大学 现代机构学研究中心,江苏 常州 213016)
0 引 言
2T1R并联机构具有控制容易、制造成本较低等优点,同时具有移动和转动输出元素,因此,被广泛应用于抓取、调姿等实际生产操作领域[1-2]。但是目前有关2T1R并联机构的相关研究仍然较少。
WANG J等人[3]提出了一种Cylindrical型的2T1R并联机构模型。杨廷力等人[4]基于单开链理论的方法,提出了多种2T1R并联机构的模型。KONG X W等人[5]、杨宁等人[6]采用螺旋理论的方法,提出了2T1R并联机构的模型。REFAAT S等人[7]基于位移粒子群理论的机构分析法,综合研究了多种2T1R并联机构的构型。张彦斌等人[8]采用线性变换理论法,提出了无奇异性的2T1R并联机构的模型。吴鑫等人[9]提出了一种新型2T1R并联机构模型,并对该机构进行了运动学分析。邓嘉鸣等人[10]提出了一种无寄生运动非对称空间2T1R并联机构模型,并分析了其运动学性能。沈惠平等人[11]提出了一种具有解析式位置正解的2T1R的并联机构,并研究了其运动学性能。
已有的上述2T1R并联机构大多数耦合度不为零,且不具有部分运动解耦的特性,这使得运动学和动力学分析等方面较为复杂[12],故均缺乏对所设计机构动力学的分析。
机构动力学分析方法中的拉格朗日法[13]的特点是运用能量守衡定律建立动力学方程,其计算量较大;凯恩法[14]较简单,但其对于力和力矩的分析比较匮乏;牛顿-欧拉法[15]易求出约束反力,但对于构件较多的机构的分析较复杂。
笔者运用基于虚功原理的序单开链法[16]进行动力学建模分析,以子运动链(sub kinematic chain,SKC)为基本单元,这样不仅能求出驱动力,还能求出其连接处的支反力,以便机构结构的强度设计[17]。
因此,笔者提出一种新型运动解耦的2T1R并联机构,采用基于拓扑特征的运动学建模方法,对该机构进行位置分析;进一步采用基于虚功原理的序单开链法对该机构进行动力学分析,为后续机构分析和样机研发提供基础。
1 机构设计和分析
1.1 机构设计
1.1.1 机构设计思路
串联、并联机构的方位特征(position and orientation characteristic,POC)集的计算公式[18]6-7表示如下:
(1)
(2)
式中:Mji为第i个运动副的POC集;Mbi为第i条支链末端的POC集;MPa为机构动平台的POC集。
一方面,为设计出所需的2T1R并联机构,需构造约束度为零,且含部分驱动副的结构简单、支链干涉少的混合支链;另一方面,笔者设计的2T1R并联机构拟采用两混合支链的结构,且其末端运动输出至少都须包含2T1R元素,具体如下。
1.1.2 机构设计过程
2T1R并联机构设计过程如图1所示。
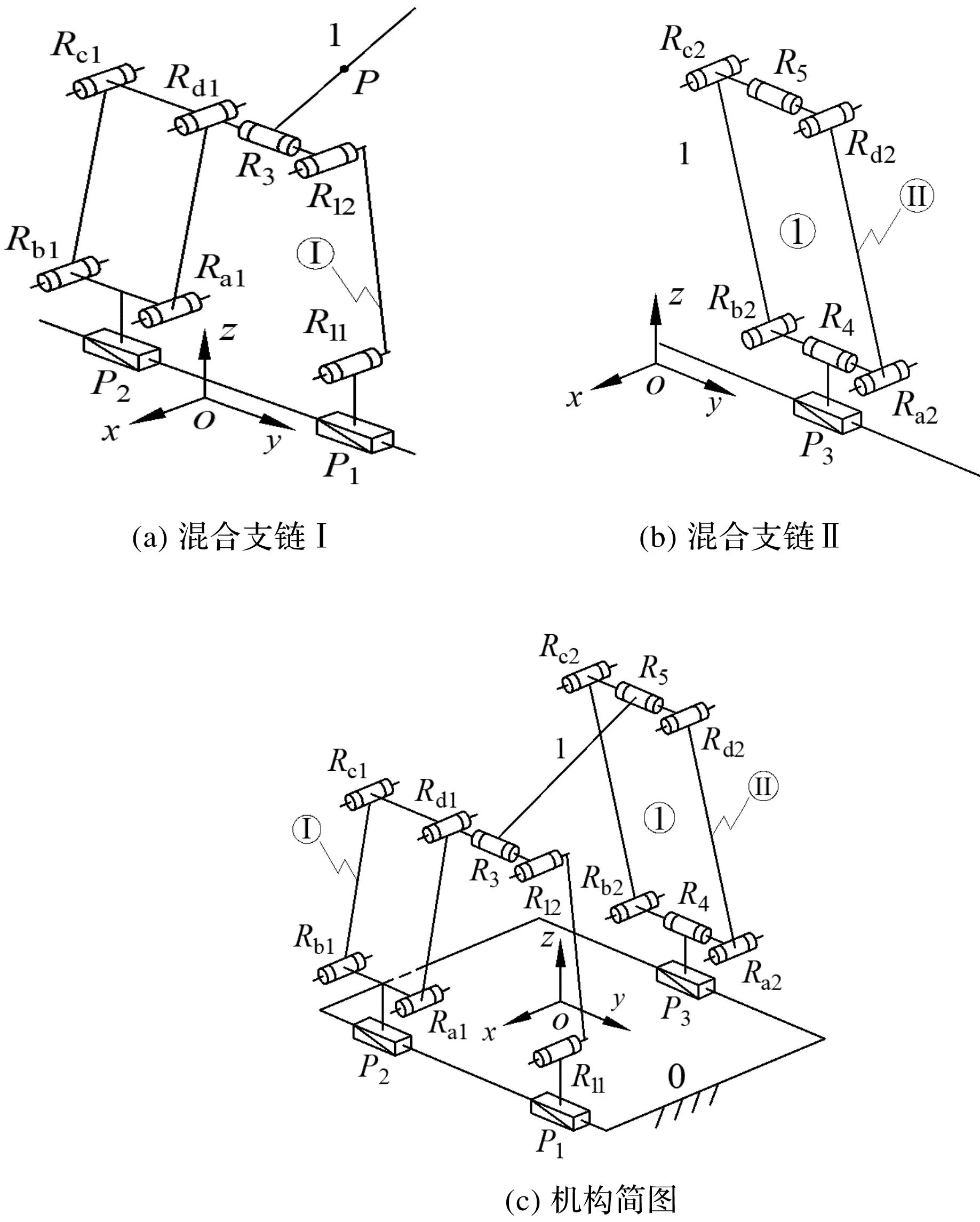
图1 2T1R并联机构设计过程Fig.1 Design process of 2T1R parallel mechanism
1)混合支链Ⅰ的设计
首先,混合支链Ⅰ的设计如图1(a)所示,其主要由一个2T平面机构串联一个R3构成。其中,2T平面机构主要由两支链构成,移动副P1和转动副R12、R11串联组成子支链1,移动副P2和4R平行四边形(Ra1Rb1Rc1Rd1)结构Pa串联构成子支链2,且P1和P2共线。因此,混合支链Ⅰ记为:HSOC1{-P1⊥R11‖R12⊥R3-Pa-P2-},符号“‖”、“⊥”分别表示运动副的轴线平行和垂直。
为便于表达,在静平台0上建立坐标系o-xyz(其中,y轴与P1轴线平行,z轴与静平台0的法线平行)。
由式(2)可知,混合支链Ⅰ输出构件末端POC集为2T1R,即:具有在yoz平面的二维(2T)移动以及绕y轴的转动。
2)混合支链Ⅱ的设计

3)机构设计
笔者将混合支链Ⅰ和Ⅱ并联连接于动平台1、静平台0之间,且使P3‖P1,得到所需设计的2T1R并联机构如图1(c)所示,其动平台1的POC集由式(2)可表示如下:

(3)
上式表明,混合支链Ⅱ提供支链Ⅰ中的一维转动,支链Ⅰ约束了Ⅱ中的移动。因此,笔者设计的并联机构仅具有两平移一转动特性。
1.2 机构自由度验证
1)机构的全周自由度
机构全周自由度计算公式[18]77-80如下:
(4)
(5)
2)机构的自由度
该机构包含两个独立回路分别为:第1回路为混合支链Ⅰ中独立位移方程数为ξL1=3的2T平面机构;第2回路由上述回路和R3、混合支链Ⅱ构成,可记为LOOP2{-R3‖R5‖R4(-Pb)‖P3-},则其独立位移方程数由式(5)计算可得ξL2=4。
则根据式(4),该机构的自由度为:F=(5+5)-(3+4)=3。
由上述可知,该机构自由度为3,驱动副为移动副P1、P2、P3。当驱动副以相同速度运动时,机构可完成y方向上单向移动;而以不同速度运动时,可实现小范围内的2T1R精确移动。
由此可见,该机构只包含2个耦合度为0的SKC。因此,可独立求解2个SKC,得到正解。
2 机构位置分析
2.1 运动学建模
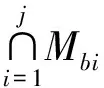
机构运动学建模如图2所示。
图2 机构运动学建模Fig.2 Kinematics modeling of mechanism
假设静平台0的长、宽分别为2a、2b,在其中心O处建立静坐标系O-xyz,x、y轴分别垂直、平行于A1A2连线,z轴由右手定则确定。
同理,在动平台1的D处建立动坐标系O′-x′y′z′。设AiBi(i=1,2,3)=l1,BiCi(i=1,2)=l2,C21C22=l3,C21C1=l4,DC3(动平台)=2d,C3B3=l5,B31B32=l6,DC3与x负半轴夹角为α。
2.2 位置正解分析
位置正解为:已知输入点Ai(i=1,2,3)的移动位置y1、y2、y3,求动平台1中点P(x,y,z)及姿态角α。
1)第1回路的求解
在静坐标系O-xyz中,可知点Ai和Bi(i=1,2,3)坐标分别为:A1=(b,y1,0)、A2=(b,y2,0)、A3=(-b,y3,0)、B1=(b,y1,l1)、B2=(b,y2,l1)、B3=(-b,y3,l1)。
由机构约束条件可知yD=y=yC3,易得:C1=(b,y+l4/2,zD),C2=(b,y-l3/2-l4/2,zD)。
又由约束条件B1C1=B2C2=l2,可得位置约束方程组,其求解结果表示如下:
(6)
2)第2回路的求解
动平台上点C3的坐标表示为:C3=(b-2dcosα,y,zD+2dsinα)。
由约束条件B3C3=l5可得约束条件方程,经化简整理,其结果表示如下:
(7)
J1=4d(zD-l1)
(8)
J2=-8bd
(9)
(10)
由此可得,中点P的坐标为P=(x,y,z)=(b-dcosα,y,zD+dsinα),易知该机构具有部分运动解耦性。
2.3 位置反解分析
位置反解为:已知动平台中点P(x,y,z)和姿态角α,求输入点Ai(i=1,2,3)的移动位置y1、y2、y3。
由式(6)及约束条件B3C3=l5可得结果如下:
(11)
其中:
(12)
2.4 正反解验算
设该机构结构参数(单位:mm)为:a=350,b=150,d=100,l1=30,l2=200,l3=120,l4=140,l5=300,l6=160。笔者取3个驱动副的位置(单位:mm)分别为y1=270,y2=-110,y3=160,代入式(6)~式(10),得到动平台中点P的机构位置正解数值,如表1所示。
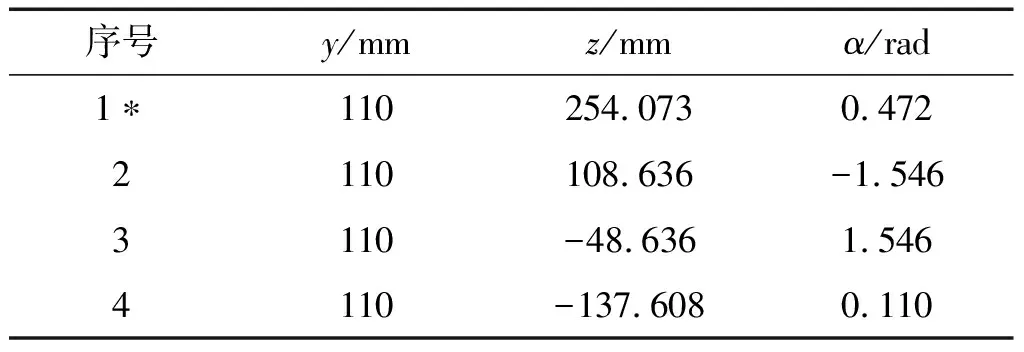
表1 机构位置正解数值
其对应的机构位置正解构型图分别如图3所示。
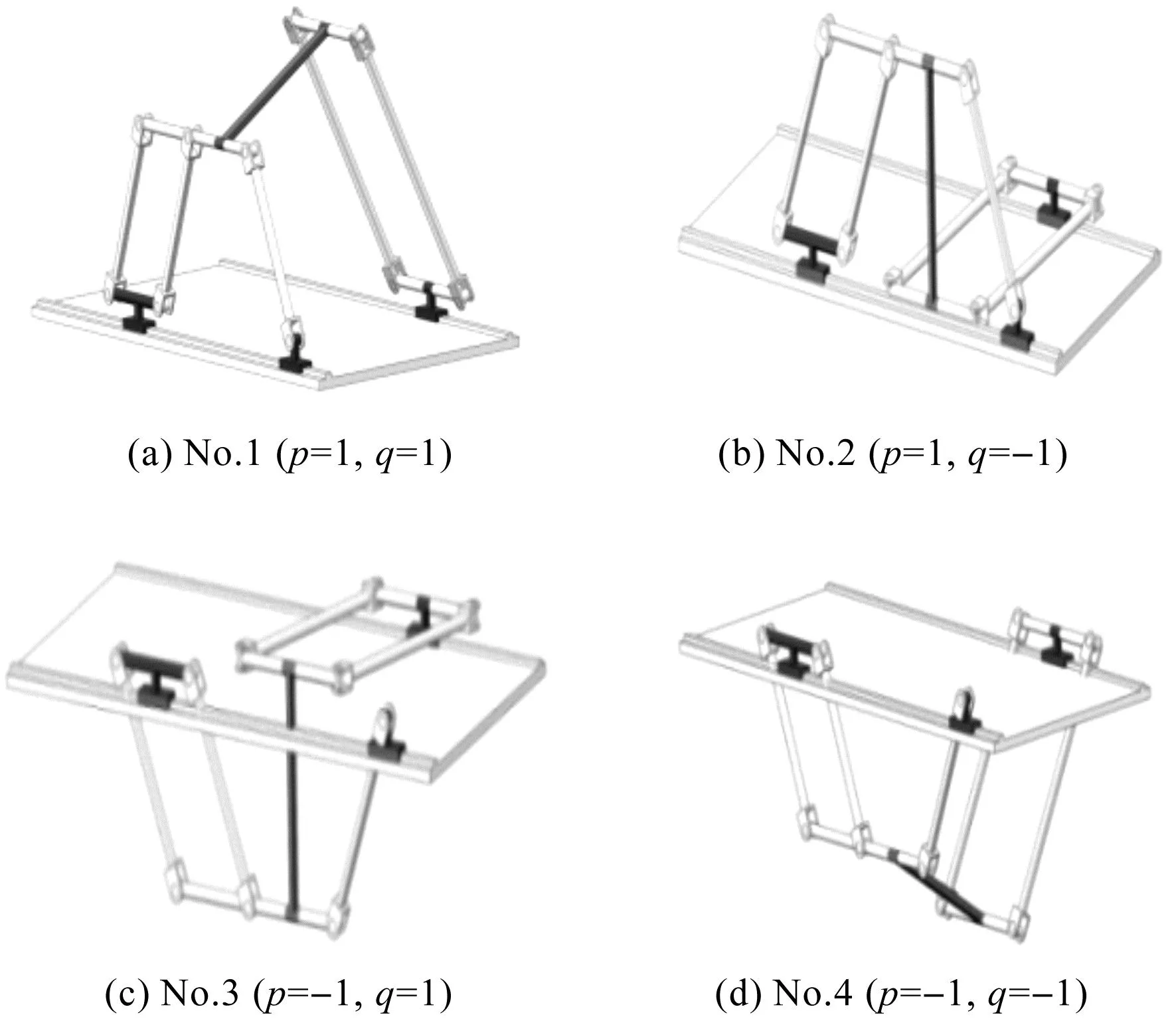
图3 机构位置正解构型图Fig.3 Configuration diagram of positive position of mechanism
由图3可知:只有图3(a)所示构型符合实际,故取表1中序号1*对应的数据代入式(11)、式(12),得到机构驱动的输入参数,如表2所示。
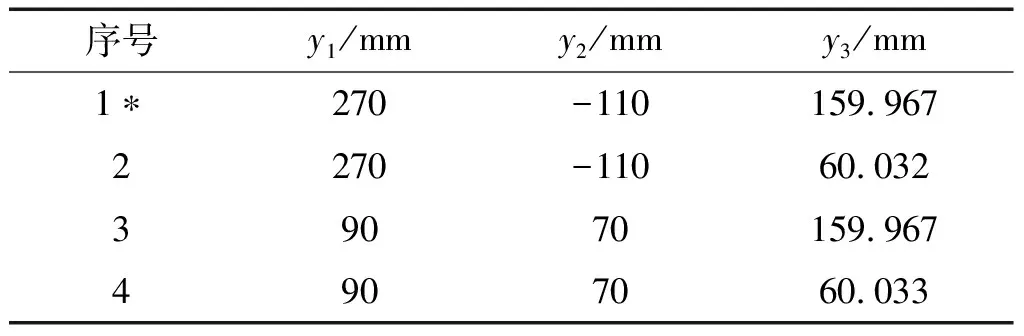
表2 机构驱动的输入参数
经笔者验证可知,机构正反解计算无误。
3 可达工作空间
因笔者所述机构具有符号式位置正解,故笔者采用基于位置正解的离散化方法[19]198-200求工作空间。该方法求解效率高、结果精确。为此,根据静平台参数确定驱动副位置的搜索范围(单位:mm):70≤y1≤300,-300≤y2≤-70,-300≤y3≤300。
笔者采用MATLAB计算得到动平台中点的三维工作空间示意图,如图4所示。

图4 动平台中点的三维工作空间示意图Fig.4 Three-dimensional working space diagram of the mid-point of the moving platform
4 奇异性与速度分析
4.1 机构奇异性分析方法
笔者采用基于雅可比矩阵的奇异位形分析方法[19]194-197,对该机构进行奇异性与速度分析。
(13)
其中:
f11=df1/dy=2(y+l4/2-y1),f21=df2/dy=2(y-l3/2-l4/2-y2),
f31=df3/dy=2(y-y3),f12=df1/dz=2(z-dsinα-l1),
f22=df2/dz=2(z-dsinα-l1),f32=df3/dz=2(z+dsinα-l1),
f13=df1/dα=2dcosα(dsinα+l1-z),f23=df2/dα=-2dcosα(z-dsinα-l1),
f33=df3/dα=4dsinα(2b-2dcosα)+2dsinα(z+dsinα-l1),
g11=df1/dy1=2(y1-l4/2-y),g22=df2/dy2=-2(y-l4/2-l3/2-y2),g33=df3/dy3=-2(y-y3)。
4.2 动平台中点的速度和加速度分析
4.2.1 速度和加速度公式与计算
当机构处于非奇异位置,且Jo可逆时,由式(13)得动平台中点P的速度表示如下:
(14)
对式(14)进行求导,得到输入与输出加速度之间的关系表示如下:
(15)
K0=[K1K2K3]T
(16)
式中:K0为Jo和Ji内各项元素对时间t的导数。
其余杆件的速度和加速度可由刚体的速度(加速度)合成定律求出,此处略去推导过程。
4.2.2 速度和加速度算例验算
机构参数在2.4节中已给出。若该机构的3个输入函数(单位:mm)分别为y1=40sin(πt)-224.64、y2=-25cos(πt)-121.01、y3=15sin(πt)+120.22,由MATLAB计算式(14)、式(15),可得到动平台中点P的速度和加速度的理论曲线,如图5所示。
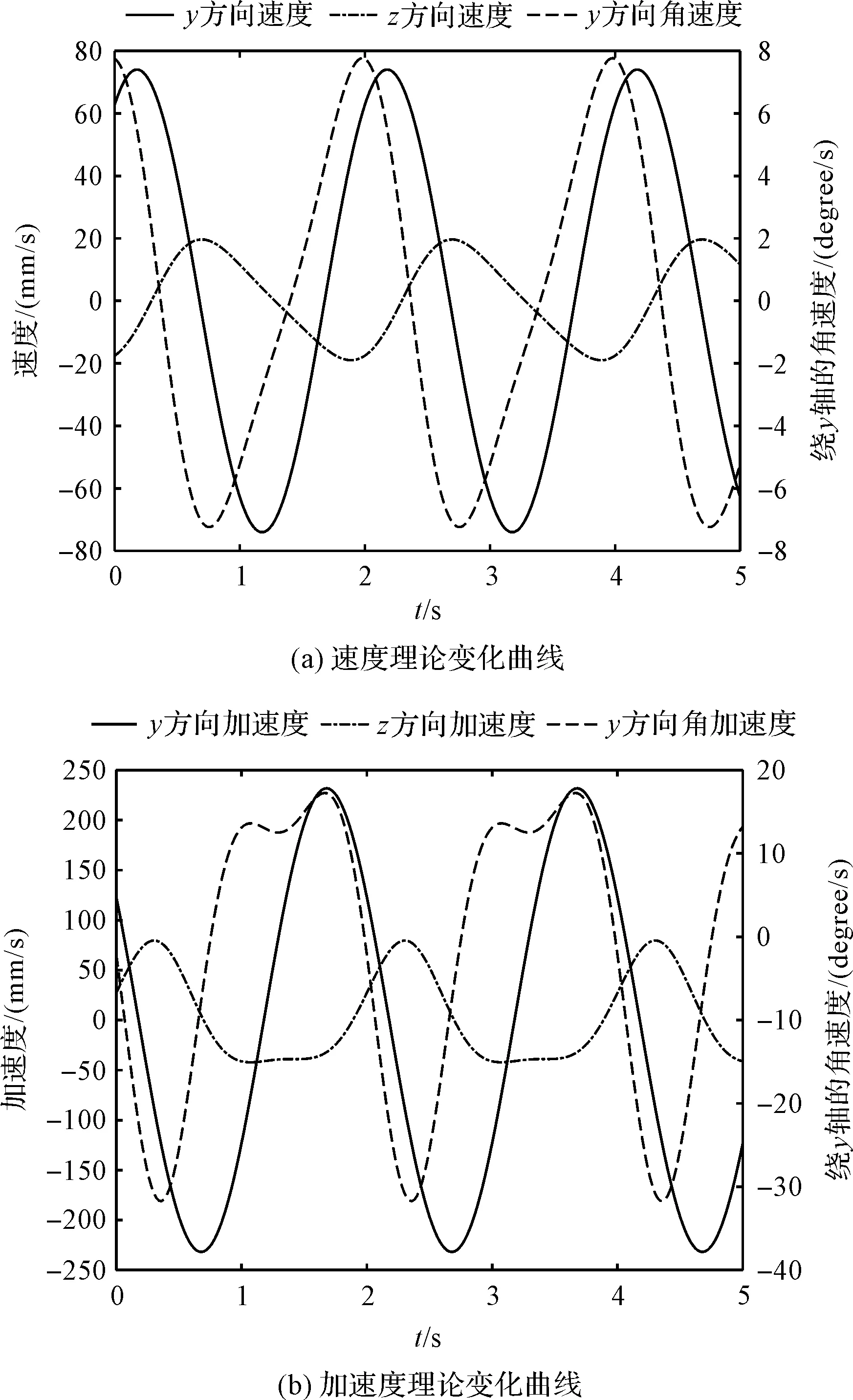
图5 动平台中点速度和加速度的理论曲线Fig.5 Theoretical curve of midpoint velocity and acceleration of moving platform
同时,笔者运用ADAMS软件建立运动学模型,并进行模拟仿真,得到与理论相差不大的仿真速度和加速度曲线。因此,运动学模型建立无误。
4.3 奇异性分析
4.3.1 输入奇异
当det(Ji)=0时,发生输入奇异。3种情况如下:
1)g11=0,即yA1=yC1时,发生输入奇异1;
2)g22=0,即yA2=yC2时,发生输入奇异2;
3)g33=0,即yA3=yC3=yP时,发生输入奇异3。
机构的3种输入奇异位置如图6所示。

图6 机构3种输入奇异位置Fig.6 Three input singular positions of mechanism
4.3.2 输出奇异
当det(Jo)=0,发生输出奇异,有2种情况:
当f11=f21,即y1-y2=l3/2+l4时,发生输出奇异,此时机构的位置如图6(a)、图6(b)所示;
当f11≠f21,且f22f33=f32f23时,有2种情况如下:
①当z=dsinα+l1,此时f22f33=0,即zB3=zC3时发生输出奇异,机构输出奇异位置如图7所示。
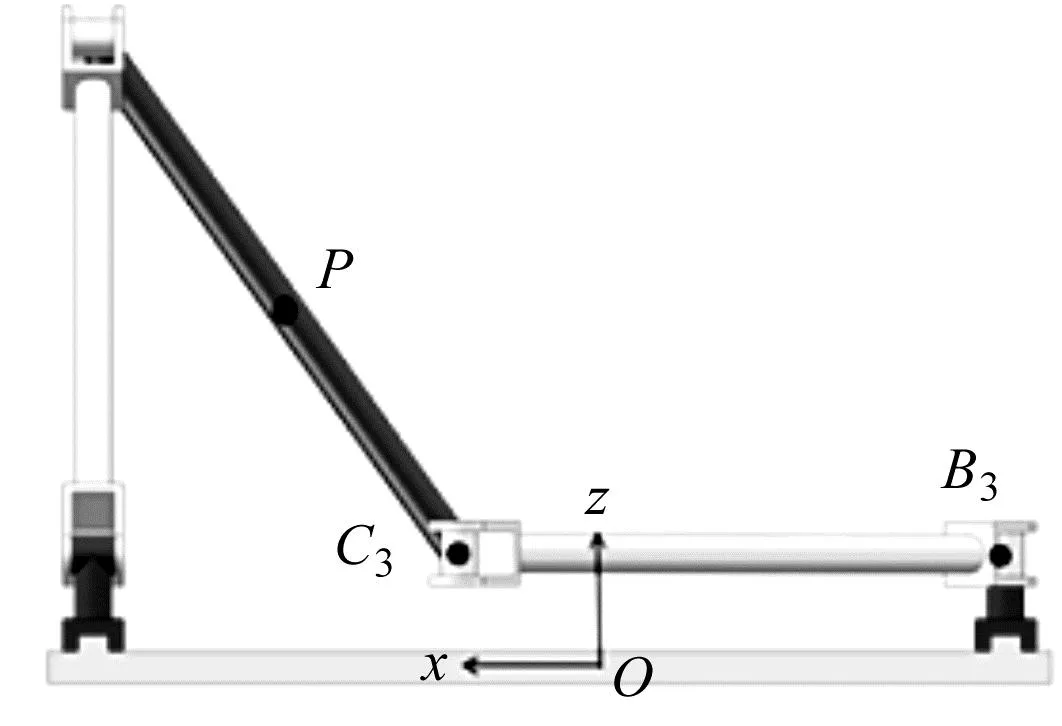
图7 机构输出奇异位置Fig.7 Singular position of mechanism output
②当z≠dsinα+l1,即(z-l1)cosα+2bsinα=dsinαcosα时,机构发生输出奇异。
4.3.3 综合奇异
当det(Jo)=det(Ji)=0时,发生综合奇异。
经分析,当yA1=yC1,且yA2=yC2相等时,发生综合奇异,如图6(a)、图6(b)所示。
5 动力学分析
5.1 基于虚功原理的序单开链法基本原理
笔者基于虚功原理建立动力学方程,求解驱动力。
5.2 受力分析
构件上所受的力主要是重力和惯性力,且仅受惯性力矩。为了简化计算,将杆件所受的外力(矩)化简为对应质心的合力矢量Q。
1)动平台
取P为动平台质心,则其合力矢量表示如下:
(17)
式中:fp为动平台所受的外力;τp为动平台所受的外力矩;mp为动平台的质量;a为动平台的加速度;Ip为动平台的惯性矩阵;ω为动平台的角速度;ε为动平台的角加速度。
2)各驱动副Pi(i=1,2,3)
各驱动副Pi及连接杆的合力矢量表示如下:
(18)
K=[0 0 0]T
(19)
式中:fAi为驱动副Pi及各自连接杆所受的驱动力;mAi为驱动副Pi及各自连接杆的质量之和;aAi为驱动副Pi及其连接杆的加速度。
3)平行四边形长杆BiCi(i=1,2,3)
平行四边形机构的两长杆可等效为两短杆中点连线的转动杆BiCi,则其合力矢量表示如下:
(20)
式中:mBiCi为杆BiCi的质量;aBiCi为杆BiCi(i=1,2)的加速度;IBiCi为杆BiCi的惯性矩阵;ωBiCi为杆BiCi的角速度;εBiCi为杆BiCi的角加速度。
4)转动杆DC3、B31B32
杆DC3、B31B32的合力矢量分别表示如下:
(21)
(22)
式中:mDC3为杆DC3的质量;aDC3为杆DC3的加速度;IDC3为杆DC3的惯性矩阵;ωDC3为杆DC3的角速度;εDC3为杆DC3的角加速度;mB31C32为杆B31B32的质量;aB31C32为杆B31B32的加速度;IB31C32为杆B31B32的惯性矩阵;ωB31C32为杆B31B32的角速度;εB31C32为杆B31B32的角加速度。
5)移动杆C31C32、C1C22
杆C31C32、C1C22的合力矢量分别表示如下:
(23)
(24)
式中:mC31C32为杆C31C32的质量;aC31C32为杆C31C32的加速度;mC1C22为杆C1C22的质量;aC1C22为杆C1C22的加速度。
5.3 动力学方程
对于SKC1,解除D处的约束,于是支反力F1转化为未知外力,可得SKC1的动力学方程表示如下:
[δxB2C2δθB2C2]QB2C2+[δxC1C220]QC1C21+ [δxB1C1δθB1C1]QB1C1+[δxA10]QA1+ [δxA20]QA2-[δxD0][F10]T=0
(25)
同理,可得SKC2的动力学方程表示如下:
[δxB3C3δθB3C3]QB3C3+[δxDC3δθDC3]QDC3+ [δxA30]QA3+[δxC31C320]QC31C32+ [δxB31B32δθB31B32]QB31B32+[δxPδθP]QP+ [δxD0][F10]T=0
(26)
式中:δxq,δθq为移动虚位移和角度虚位移;q为各杆件参数标注。
5.4 数值仿真算例
设各构件均为规则、质量均匀的刚体,各杆件的长度已在2.4节给出,其质量参数为(单位:kg):
动平台质量mp=0.242 4,其余各杆质量分别为mA1B1=0.114 4,mA2B2=0.261 2,mA3B3=0.104 4,mB1C1=mB2C2=0.251 0,mB3C3=0.364 1,mC1C22=0.326 3,mC31C32=0.202 1。
各杆件转动惯量如表3所示。

表3 各杆件转动惯量参数(单位:kg/mm2)
笔者仅考虑该机构承载7 kg载荷的情况,且驱动副的运动规律与2.4节相同。
首先,通过MATLAB计算式(25)、式(26),得出理论曲线;进一步,在ADAMS软件中,导入仿真模型如图3(a)所示,并设定各构件的必要属性和约束关系,施加重力g,设步长为0.01 s,仿真时间为5 s,得出仿真曲线。
2T1R并联机构驱动力曲线如图8所示。
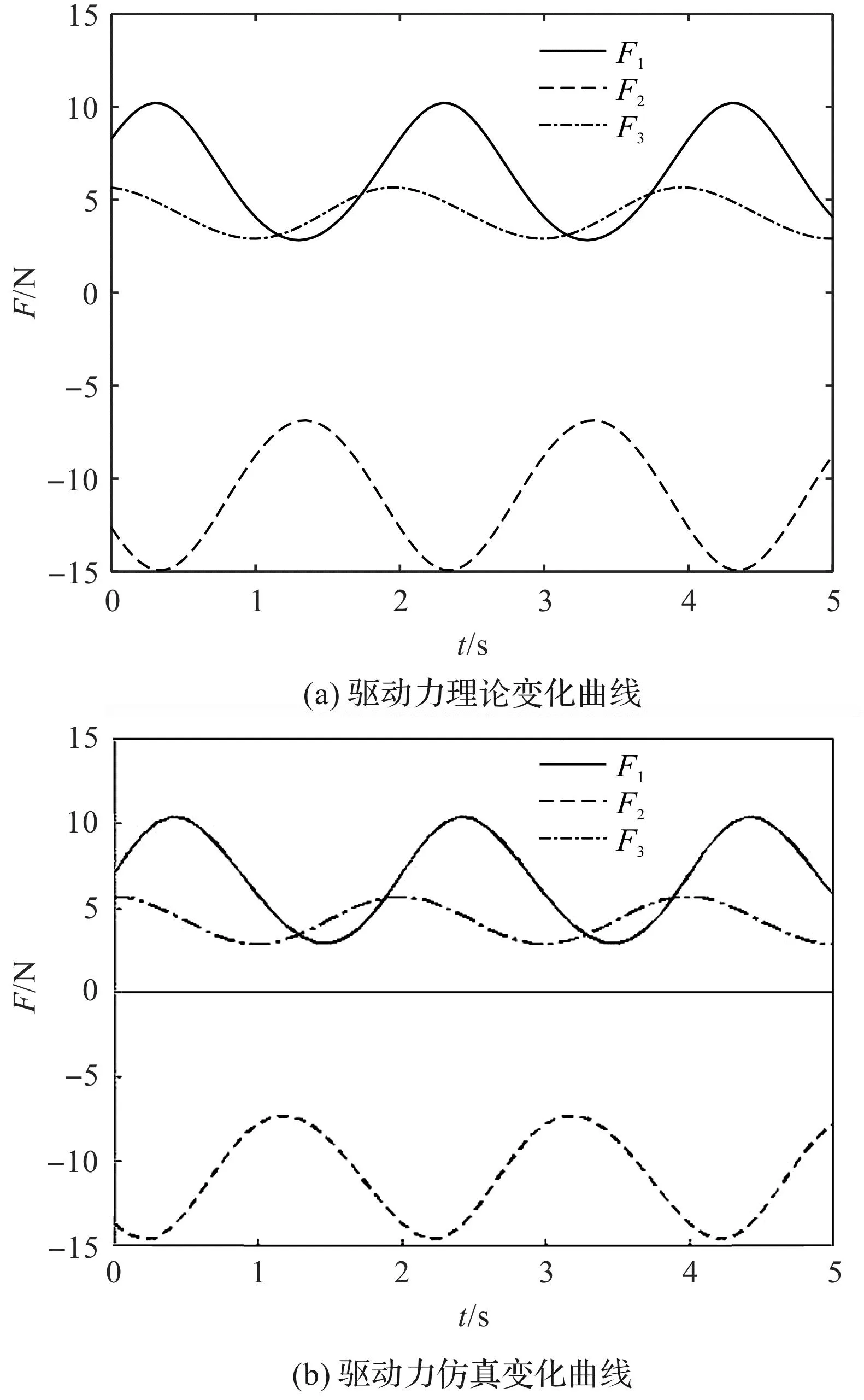
图8 2T1R并联机构驱动力曲线Fig.8 Driving force curve of 2T1R parallel mechanism
由图8可知:该并联机构的驱动力理论与仿真曲线轨迹大致相同(相对误差2%以内),可知动力学模型建立无误。
6 结束语
针对工业生产中既需要小范围精确作业,又需要大范围单向操作的双重需求问题,笔者设计了一种新型2T1R并联机构,并对其进行了运动学位置分析和动力学分析,计算得出了该机构的工作空间、奇异性、速度加速度以及3个驱动副所需要的驱动力。
研究结果表明:
1)该机构耦合度为零,具有符号式位置正解,且部分运动解耦,有利于机构后续的运动轨迹规划和控制的研究;
2)部分工作空间具有各向同性,机构具有良好操作性能,可满足小范围精确作业和大范围长距离的操作要求;
3)通过虚拟仿真,验证了笔者研究中机构的理论速度、加速度以及动力学模型的正确性(相对误差2%以内)。同时,根据驱动力曲线分析可知,机构运动平稳。
后续,笔者将进一步研究机构动力学的惯性力全域性等指标,为研制样机提供技术参考。
