冷原子物质波干涉仪的应用
2023-12-19苗燕茹朱向冰
苗燕茹,朱向冰
(安徽师范大学物理与电子信息学院,安徽 芜湖 241002)
0 引言
干涉现象是物质波动性的一种特有表现,满足相干条件的两列波相遇后,表现为明暗相间的干涉图案。原子物质波的干涉现象因为其波长太短(一般为0.1~ 1 埃),在实验上也难以观察到。但激光冷却后的原子动能很低,它的物质波长会比一般情况大得多,甚至大于光波波长,使把原子的物质波作为干涉实验对象成为可能。尽管从德布罗意开始,人们就已经认识到了物质的波动性质,但在适当的技术被设计出来并与冷却、操纵原子互相结合之前,物质波的实际应用并没有到来,这些技术在近几十年间不断完善与成熟,促进了(冷)原子干涉领域的发展。
原子干涉类似于光学干涉,都建立在光和物质交互作用的基础上。一般地,把原子干涉仪分为内态与外态两种。内态干涉仪通过操控原子内部能级状态实现物质波干涉,原子会因为吸收或发射光子而改变自身能态,也会因为得到光子动量而改变原运动轨迹,而外态干涉仪常指由于原子位置不同而导致路径相位不同的物质波干涉仪。内态干涉仪多采用冷原子,但外态干涉仪一般采用原子束技术而不对原子进行冷却。在精密测量领域,因为对实验结果精确程度有极高的要求,以冷原子为干涉对象的内态干涉仪被广泛应用。
本文结合国内外现有的研究成果,对冷原子物质波干涉仪进行了研究综述,首先简明扼要地说明了原子干涉仪的背景,接着讨论原子干涉仪的实际应用,最后给出作者的总结与思考。
1 冷原子干涉仪的应用
1.1 冷原子干涉重力仪
在零重力(加速度)条件下,如图1 所示,两条原子路径呈平行四边形,此时的干涉相位为:

图1 重力加速度测量原理图[1]
式中φ0、φ1和φ2分别为与原子作用时原子所处相位上三个激光脉冲的相位,φ2a、φ2b分别为第二脉冲在两条空间分离路径上各自的相位。
原子具有质量,干涉路径会在重力场(g1)作用下发生偏移,具体如图1 所示。由此使得原子在与激光相互作用的过程中拾取到不同的激光相位。重力影响下的原子干涉相位如下:
式中keff•gT2是因重力加速度而产生的相移。通过对原子干涉信号相移的测量可以实现对重力加速度g的测量。
重力加速度g是一个关键重力场参数,精确测量重力加速度为分析重力场的变化规律、地壳的运动和结构、地表的重力场参数等提供了事实依据[2-3]。
首台喷泉式原子重力仪由美国Stanford 大学的Chu 小组实现,但其系统复杂、体积庞大。自2010 年后,众多实验室开始将研究重点放在仪器轻小化、工程化上。
LNE-SYRTE 实验室所研制出原子重力仪如图2 所示[4],整套系统可移动。把冷原子重力仪安装在低噪声重力实验室(LSBB)中,使用温度2μk的87Rb 冷原子样品为测试样本评估该仪器在低背景噪声环境中的运行结果,该套系统短期灵敏度(100 s 测量时间内)可以达1μGal。

图2 LNE-SYRTE 实验室的原子重力仪
英国Birmingham 大学制成原子芯片喷泉重力仪,提出将芯片MOT 用于原子重力仪中,进一步加强了实现设备小型化、紧凑化的可能[5];新西兰Otago 大学[6]与德国Hannover 大学均在开发可以减小体积,增加灵敏度与抗振能力的新型原子干涉仪,前者提出了一种可紧凑原子重力仪的新手段,后者创建了一种高度便携的磁光阱演示系统,并已用于现有实验方案的测试,开发的重力传感器如图3 所示。值得一提的是,美国California 大学Berkeley 分校负责原子干涉仪研制的团队使用可移动原子干涉仪进行了重力测量,完成了海拔落差约400 m,移动距离约7.6 km 的车载实验[7],不确定度为0.04 mGal,他们还通过将原子囚禁在光晶格中的方法延长了20 s 的干涉时间[8],进而抑制了由于振动引起的相位变化,克服了原子干涉重力仪的主要噪声来源。

图3 Hannover 大学的重力传感器
为进一步实现冷原子重力仪的户外作业,浙江工业大学提出了一种在大倾斜角度下测量绝对重力的方案,实验所用冷原子干涉重力仪如图4 所示[9]。2019 年,浙江工业大学的一篇硕士论文中提到了小型化冷原子重力仪,其拥有基于光纤激光器的高集成度光学系统,与以往的重力仪相比体积减少了2/3,光路的移动和组装可由个人单独完成[10]。2021 年,该校报道了新搭建的可移动重力仪的动态测量结果,获得了与静态环境近似的测量结果,为重力仪的车载应用提供了有价值的数据参考,如图5 所示[11]。

图4 用于大倾斜角度测量的冷原子干涉重力仪
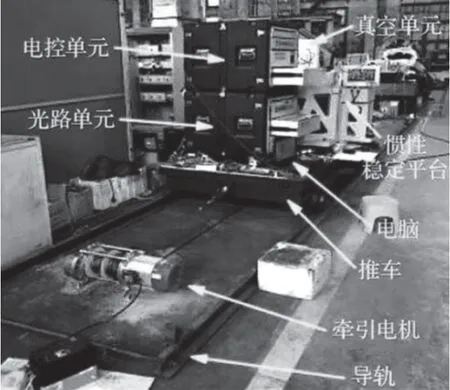
图5 车载型冷原子重力梯度仪
法国国家航空航天研究院(ONERA)在2018 年完成了在海船平台环境中使用原子重力仪测量绝对重力的实验[12],所使用的原子重力仪如图6 所示。冷原子重力仪提供加速度的绝对测量,陀螺稳定平台可以在行船角度不断变化的情况下使加速度计与重力加速度保持一致,同时还可以为重力仪提供所需要的激光、微波,执行数据和采集的系统。经评估后,该套设备的不确定度可达0.06μGal(t=39 ms)或0.17μGal(t=20 ms)。上述实验结果与卫星测高重力模型偏差平均值为1.4 mGal,均方差为2.4 mGal,两者均符合原子重力仪误差和卫星测高误差估计结果。2022 年,海军工程学院也使用其搭建的系统进行了船载实验[13],如图7 所示,航行速度约为4.6 km/h,在40 h 的连续测量作业中,长期不确定度为2.7μGal。

图6 海上原子重力仪

图7 海军工程学院用于船载实验的实验装置与轨迹
基于冷原子的量子传感器通常对其内部磁场环境有严格的要求,通常使用高磁导率磁屏蔽来衰减背景磁场,通过屏蔽内部的消除残余并引入量化场,但高磁导率屏蔽会扭曲所有磁场,包括传感器内部产生的磁场。英国Birmingham 大学物理学和天文学学院Midlands 超冷原子研究中心设计了一种基于冷原子干涉仪的线圈系统,该系统在仪器内部产生多个优化磁场。他们认为这种线圈技术可以在大空间体积上实现有针对性的场补偿,并有可能减少许多冷原子系统中的系统漂移和噪声[14]。
高精度g常数的测量在地质勘测,惯性导航等诸多领域都有着举重若轻的作用。通过提高拉曼脉冲的相噪提高干涉信号的对比度[15],通过振动补偿技术提高原子干涉重力仪在尖锐噪声环境中的测量精度[16],通过配置MOT 线圈补偿偏置场不均匀性,进而提升测量精度[17],相关研究还有很多[18-23]。随着噪声处理技术的日益精湛,冷原子干涉重力仪的灵敏度、分辨率不断得到提高,对重力测量技术的误差评估也成了国内外的重点研究课题[24]。
1.2 冷原子干涉重力梯度仪
基于1.1 所讲述的原理,两个原子干涉仪组合在一起便可以实现一个重力梯度张量分量的测量。如图8所示,原子重力梯度仪由在垂直方向上相距L 的两个原子干涉仪所组成,可以用来测量垂向分量(Γzz)。
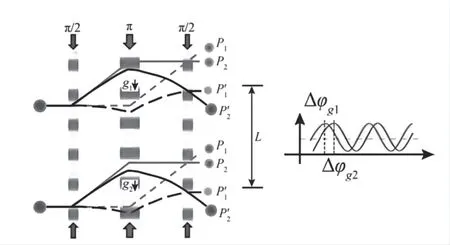
图8 垂向分量原子重力梯度测量原理图[1]
设两个原子干涉仪在两个重力场g1、g2(g1≠g2)的作用下分别产生Δφg1和Δφg2的相移,则相移差ΔφΓ=Δφg1-Δφg2,其正比于重力加速度数值之差Δg=g1-g2,重力梯度Γzz=Δg/L,结合上式可得:
据(3)式,测量两个原子干涉仪的相位差,就可以实现重力梯度的测量。
美国Stanford 大学利用两个原子干涉仪首先实现了在实验室内对本地重力梯度的测量,此后开辟了原子重力梯度仪研究的新时代。关于原子干涉重力梯度仪现阶段发展状况,在此做简单介绍。
欧洲空间局(European Space Agency)于2014 年提出使用冷原子干涉仪来测量重力梯度张量的对角线元素和航天器角速度可以实现较以往更好的性能[25]。巴黎天文台 LNE-SYRTE实验室研究了一种基于冷原子干涉技术的天基重力梯度仪,描述了其在地球重力场测绘方面的实际应用潜力[26]。
佛罗伦萨大学属于世界上研究重力梯度仪较早的单位之一,早在2006 年就研制出了单阱双抛型重力梯度仪,如图9 所示采用“juggle”制备技术可以获得相同速冷原子团,有利于减少测量误差[27]。2021 年,华中科技大学研制出了高精度双阱同步上抛型垂向原子重力梯度仪,实际应用于测量万有引力常数,如图10 所示,该重力梯度仪底部设有两个独立的三维磁光阱,顶部设有两个干涉管,梯度仪工作时,两个三维磁光阱会以相同的初速度同时加载、发射两个原子云,两个干涉仪的干涉过程会在磁光阱上方的同一真空管道中进行。此种操作方式可以减少冷原子制备时间,提高测量速率和测量精度,同时也便于控制磁场和引力源。此冷原子干涉重力梯度仪测量基线长度为30 cm 测量灵敏度为99 E/Hz1/2,经3600 s 的积分后可达到接近1 E 的测量分辨率[28]。
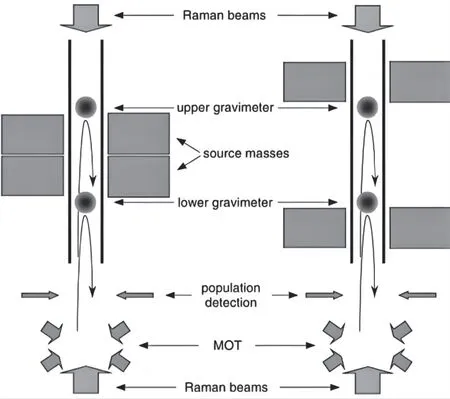
图9 单阱双抛型重力梯度仪示意图
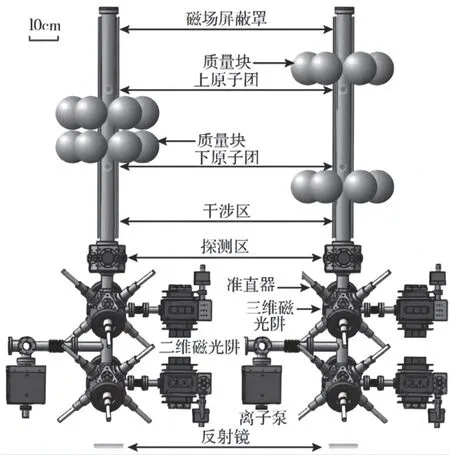
图10 双阱上抛型重力梯度仪示意图
2022 年初,英国Birmingham 大学以大量针对环境适应性的研究为基础,实现了具有极高鲁棒性的下落型垂向原子重力仪,如图11 所示[29]。此装置基于两个沙漏构型的原子干涉仪,为降低测量误差及背景干扰,采用一个垂向传播的大尺寸激光束配合四个45°反射棱镜来产生囚禁原子的四个水平光束,这种方式使得激光光强、频率等参数的起伏对四个水平激光束的影响完全一致。据报道,该仪器的性能已经在户外实地测量中得到了检验,遗憾的是并未实现很高的测量分辨率,但由于此仪器具有很高的环境适应性,故在考古等领域中发挥着重要的作用。

图11 下落型垂向原子重力梯度仪及外场实验示意图
除鲁棒性和分辨率之外,仪器的集成度也是一个亟待攻克的难题。2022 年初,中科院精密测量院制备完成了一台高集成度绝对重力梯度仪,如图12 所示[30]。该装置尺寸仅有37 cm×28 cm×92 cm,但在其内部却实现了45 cm 的测量基线和130 ms 的原子自由演化时间,同时集成了二维磁光阱用于原子预冷却,该团队通过一系列的技术突破,最终实现了160 E/Hz1/2 的测量灵敏度,经过17000 s 积分使测量分辨率达到了0.9 E。

图12 高集成化原子重力梯度仪示意图与实物图
目前,冷原子重力梯度仪技术已进入工程实用化阶段,各个研究单位也正在攻克高动态范围及微小型化等难题。重力梯度仪不仅具有高精度、无机械磨损、可常温工作等特点,还可以作为绝对重力梯度仪为其他相对仪器提供校准服务,具有极大的应用潜能。
2 结语
继国际上首台基于原子拉曼的原子干涉仪问世并实现了重力测量后,迅速掀起了全球范围内原子干涉技术的研究热潮。科学工作者经过不懈地努力,攻破了一系列难题,冷原子干涉技术也随之有了越来越多的应用,在传统测量仪器面前凸显出了强劲的竞争力。实验室内冷原子重力仪的静态测量技术已经相对成熟,原子重力梯度仪也已经完成了可移动平台的搭建并在户外实验中验证了其优秀的工作能力。
环境振动、重力波动和重力效应的存在限制了干涉仪的相互作用时间,限制了目前地面上原子干涉仪的性能。在适当条件下,如微重力环境中,原子干涉仪将会使迄今为止无法实现的性能变为现实,完成地面上无法实现的超精确测量。故太空中冷原子干涉仪的搭建与使用将会成为下一个重点攻克的难题之一。
把科学技术最大限度地应用于生产实践中是许多研究者们的一以贯之的研究目标,实验室中冷原子干涉技术的成熟也促使越来越多的研究者们致力于推动技术走出实验室应用到外部实际环境中,这便需要考虑到更加复杂的动态环境,克服更多的技术难题。对精密测量领域来说,尽可能地降低噪声干扰,提升测量灵敏度与精确度是横亘在前进道路上的大山,若要让仪器可以在任何情况下进行无差别的合理工作,小型化、集成化、可移动性等问题也必须被逐一解决。以冷原子重力梯度仪为例,若要实现高精度的动态测量,完全可以在动态环境中应用的冷原子重力梯度仪的研发任务,如何精准迅速地完成对两个冷原子干涉仪的动态相位提取就是其需要攻克的难题。零件的生产加工、仪器的组装调节都需要非常精细地操作,提升基层生产的速度与精度也是需要被广泛关注的问题之一,否则若科技与实际脱节,科研成果应用于实际社会生产将会更难实现。
