基于模糊控制的食品柔性供袋装置步进驱动系统研究
2023-12-18唐静静王志鹏徐雪萌张映霞
唐静静,王志鹏,徐雪萌,张映霞
河南工业大学 机电工程学院 (郑州 450001)
随着“工业4.0”和“中国制造2025”的深入推进,新兴技术与机械学科不断融合,各企业通过优化和升级生产设备及关键技术等手段推动我国制造业向智能化、规范化转型。食品装备制造业事关我国国民生活,是我国制造业的重要分支,食品机械的发展与创新也备受关注。包装机械作为食品机械系统的重要组成部分,对食品的生产效率有深远的影响。在智能制造发展趋势的影响下,我国食品包装机械朝着着智能化、柔性化方向逐步发展[1-2]。在种类繁多的食品包装机械中,袋包装机是最常见的食品包装装备之一,实现包装过程中的包装袋供袋、食品填充、包装袋热封等关键技术环节。经过深入调研与分析发现,我国大多数食品包装机械企业制造的袋包装机存在供袋速度和精度低,对不同规格和材料的包装袋适应性差等问题。随着企业对食品种类的持续开发和不断创新,有必要对如何提高包装机供袋效率和柔性功能展开研究,以适应高速、精度包装要求,以及实现一机多用的功能。
在包装机供袋装置方面,陈营等[3]基于回转式充填包装机,提出在连续填充形式下预制袋的连续供送方案,实现了选定规格的预制袋连续供送。杨军福等[4]设计了回转包装机供袋部件的自动供袋机构,建立了机构输出与凸轮输入转角的数学模型。王志鹏[5]研究了不同规格、不同包装材质的供袋技术,开发了从取袋到填充落料的柔性供袋机械系统。国内在包装机供袋装置的研究主要集中在如何实现连续供袋的关键技术,对柔性供袋研究较少。在供袋自动控制研究方面,张小甫[6]根据粉料包装工艺流程特点设计,运用PLC开发了自动粉料包装控制系统。库莉珊[7]通过水泥包装机自动插袋的气、机电一体化系统设计来实现供袋动作。较少有学者将模糊控制理论应用于供袋控制。目前模糊控制理论主要应用于食品的定量供料和定量称重的研究。如马云飞等[8]提出了皮带给料定量包装的Matlab模糊控制算法,将控制系统的稳态误差降低了80%;陈静等[9]分析了食品类粉料定量包装的速度和精度问题,添加了称重模糊控制模块,提高了控制系统的响应速度和包装精度。现有文献表明模糊控制算法可降低食品包装机械控制系统中产生的误差值,进一步增强系统的稳定性和提高系统的精确性,同时具有一定的抗干扰能力。综上所述,运用模糊控制理论研究食品包装柔性供袋,促进袋包装机供袋的智能化、柔性化具有一定的推动意义。
1 食品柔性供袋装置步进驱动系统
食品柔性供袋技术主要是指适用于不同规格、不同包装材质的供袋技术。柔性供袋装置能够实现不同规格和材质的预制袋在取袋到填充落袋过程的智能化。装置示意图如图1所示。为实现连续供袋,同时考虑供袋装置对不同规格和材质的预制袋适应性,设计了三个袋库工位:补充工位、中间工位和取袋工位。补充工位为第一顺序袋库工位,中间工位为第二顺序袋库工位,其作用是取袋工位前的预制袋过渡位置。取袋工位为第三顺序工位,该位置即取袋机构完成取袋动作的工位。供袋步进驱动系统由步进电机、同步带、推袋机构组成。推袋机构固定在同步带下方,由气缸和推袋杆构成,气缸驱动推袋杆可使其做升降运动。一个往复运动周期的动作为:步进电机驱动同步带做正反转运动,带动推袋机构做往复直线运动。当同步带向供袋进给方向运动时,气缸推动推杆上升,推动预制袋向前移动,到达下一个供袋工位时气缸驱动推杆下降,同步带带着推袋机构返程。考虑到预制袋规格的多样性及在移动的过程中会产生偏差错位,利用PLC的记忆功能将模糊控制规则存在PLC存储模块,从而实现连续式的供袋动作,提高整体步进驱动控制系统的运动位置精度和响应速度[10-11]。
由于步进电机内部结构相对复杂,耦合性较强,无法精确建立其数学模型,最终导致传统PID控制移动的过程中会产生偏差错位。因此,为了提高柔性供袋装置步进驱动系统的抗干扰能力和运动位置精度,更好地配合撑袋工艺提高包装效率,建立步进驱动模糊PID控制系统,基于参数修正的过程确保预制袋供送的位置精度,在一定程度上提高柔性供袋装置步进驱动系统的位置精度要求和响应速度,从而提高包装自动生产线的包装精度和包装速度,对实现不同产品的多规格、多材质、多功能高速包装具有重要的实践意义。
系统的数学模型一般由传递函数的形式表示,在本文设计的柔性供袋装置步进驱动控制系统中,将脉冲电压作为输入信号驱动步进电机转动,位移传感器检测到的推杆位移值作为输出信号。在求解步进驱动系统数学模型时,可将整体分为步进电机传递函数和同步带传递函数,同时为了实现更好的研究,将其本身影响较小的因素排除,特做出如下假设:忽略电机磁路的饱和现象,并且将被控制对象分析为线性元素;忽略定子端部位置、永磁体及极间的漏磁现象;忽略定子机身位置和轭部位置的磁阻。
步进电机为混合式类型,设步距输入角θi;转子实际转过的角度为θo由小振荡理论可建立柔性供袋步进驱动系统传递函数为:
(1)
步进电机的电压平衡方程和转子力矩平衡方程为[12]:
(2)
(3)
(4)
式中:UA、UB、iA、iB为AB的相电压和相电流;RL为绕阻的电阻和电感;θwJZr为转子的角位移、角速度、转动惯量和齿数;TLBKmTE为负载转矩、粘滞阻尼系数、反电势系数和电磁转矩。
设电机模型为单向励磁,由公式(4)可推出运动方程为:
(5)
当t为0,转子到达平衡状态时,电机仅有一相电源通电,振荡的过程中电流iA未发生变化,增量运动方程为:
(6)
在公式(6)由于δθ=θo-θi较小,将其线性化处理可得:
(7)
将初值设为0代入拉氏变换后的公式(7)可得:
(8)
由公式(8)可得步进电机传递函数为:
(9)
同步带在运动原理上存在一定的线性关系,故同步带传递函数为:
(10)
可得系统的数学模型为:
(11)
本文研究的供袋装置步进驱动系统中,同步带轮的直径为69 mm,所选电机型号为HSTM86-1.8-S-116-4-6,将相关参数代入式(1-11)可得:
(12)
2 模糊控制器供袋装置步进驱动系统仿真
2.1 模糊控制器的设计
柔性供袋装置步进驱动系统的主要作用是实现预制袋推杆的精确定位,从而保证预制袋到达取袋工位的位置精度。选择PID参数整定方式作为二维模糊控制器,控制原理如图2所示。

图2 模糊PID控制器原理图
2.1.1定义语言变量
模糊控制系统可以将控制器的控制量化等级实现离散化,即实现量化模糊论域[13]。选择预制袋推杆的位移值偏差e、位移值偏差变化率ec为输入变量,PID控制器中的修正系数Kp、Ki、Kd为输出变量,根据控制器的三个增量ΔKp、ΔKi、ΔKd求解Kp、Ki、Kd,使其可根据实际工作环境实现自我调节[14]。根据实际应用生产可知,取袋工位的实际偏差为±6 mm,设定e和ec的定义论域和Kp、Ki、Kd的模糊论域均为[-6,6],偏差e和偏差变化率ec的量化因子Ke、Kec均为1。
Ke、Kec与所对应的模糊子集如下所示:
Ke、Kec={NB NM NS ZO PS PM PB}
ΔKp、ΔKi、ΔKd对应的模糊子集如下所示:
2.1.2建立隶属函数
隶属函数的确定通常基于专家的经验。在面对同一个模糊概念时,由于一定的经验限制,模糊的基本概念在整体上保持一致[14]。所以在建立隶属度函数的过程中必须考虑一定的客观经验基础,根据其本质去确定最终的函数。
当前,隶属度函数类型较多,为了计算更加方便需要考虑各个函数的计算难易程度,高斯形函数适当的选择中心和宽度可以构造成一个简单的模糊参数区间,灵活性较好;三角形隶属度函数相对简单,在工程的应用较为广泛。根据柔性供袋装置的控制特点和实际应用环境结合两种隶属度函数各自的优点进行模糊论域与模糊变量语言等级的设置。
2.1.3确定模糊规则
根据PID参数经验知识、调节规律及相关文献查询,在进行参数整定时需要基于一定的原则:
(1)系统e较大时,应增大ΔKp、减小ΔKd增加系统的反应速度,同时减小ΔKi抑制系统的积分作用避免出现超调现象。
(2)系统e大小适中时,应减小ΔKp降低超调现象;同时适当的增加ΔKi、ΔKd,以满足一定程度的系统反应速度。
(3)系统e较小时,应增加ΔKp、ΔKi,以提高系统整体的控制性能,同时应基于偏差变化率改变ΔKd,以避免系统的震荡。
综上所述,模糊控制规则如表1所示。

表1 模糊控制规则表
2.1.4解模糊处理
借助于模糊控制器,对通过推理获得的模糊量进行去模糊处理,并获得一定值。通过前面介绍的ΔKp、ΔKi、ΔKd比例因子来计算最终的Kp、Ki、Kd,控制PID控制器的输出。选择重心法作为去模糊化方法[15]:
(13)
将模糊规则输入MATLAB的fuzzy logicdesigner模块中得到e、ec与Kp、Ki、Kd的规律,因为Kp、Ki的模糊查询表与Kp的获取方式相同,因此本文中只列举Kp的模糊查询表,如表2所示。

表2 Kp的模糊查询表
3 模糊PID控制器的模拟与仿真
3.1 传统与模糊PID控制对比仿真模型的建立
在Simulink模块中建立柔性供袋装置的模糊PID控制模型,并将传统的PID控制模型进行仿真,与模糊PID控制模型进行比较,二者控制器参数保持一致,获得控制系统模型响应曲线如图3所示。
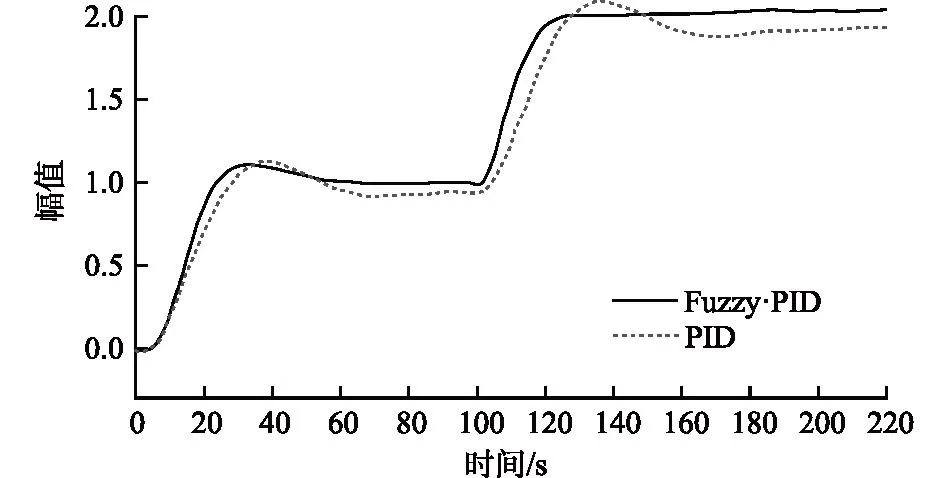
图3 加干扰系统的阶跃响应仿真曲线
3.2 传统PID控制系统与模糊PID控制系统仿真结果分析
由图3可知,通过对比可发现:设置相同的PID初试参数,在初始时刻0~100 s内,同等时间内模糊PID控制系统比传统PID控制系统达到稳定的时间减少了40%,模糊PID控制系统的仿真曲线在同等时间内反映更快;虽然也存在一定的超调量,但模糊PID控制系统的超调量明显减少。为了更好检验步进驱动控制系统的稳定性和抗干扰性,在系统100 s处加入干扰信号,由图可看出步进驱动控制系统加入干扰后,阶跃响应产生一定的突变,但可以很快实现自我调节至新的平衡状态。综上所述:两种控制方式中模糊自适用PID控制系统响应速度更快,系统稳定时间缩短,控制性能和控制效果更为优越。
4 结论
通过建立柔性供袋装置步进驱动控制系统的控制仿真模型可知,在同等时间内,柔性供袋装置步进驱动模糊PID控制系统达到稳定的时间比传统PID控制系统减少了40%,该方法可以使柔性供袋装置步进驱动控制系统响应速度加快。受到干扰信号后,阶跃响应曲线图发生一定的突变,但很快可以实现自我调节至新的平衡状态。总结可得:模糊控制算法可对PID控制参数实时整定,优化柔性供袋装置步进驱动控制系统,从而实现柔性供袋装置中撑袋与上袋装置的快速性能和精确性能。
